Изобретение относится к автоматике и вычислительной технике, в частности к устройствам управления и кои троля, может быть использовано при построении систем управления различными объектами и является усовершенствованием устройства по основному авт. св. № -636608,. .,. ,.„..
Цель H3q6p eT p H - првышение надежности устройства в работе.
Наличие перехода на аварийные подпрбграь 1ы при возникновении аварийной ситуации, с целью их устранения, позволяет выполнить задачу управления Объектом в случаях, которые в известномустройстве фиксировались как авария, .
Введение автоматического останова устройства при возникновении аварии обеспечивает локализацию аварии.
Указанные новые свойства устройства позволяют повысить надежность с работы системы устройство-объект.
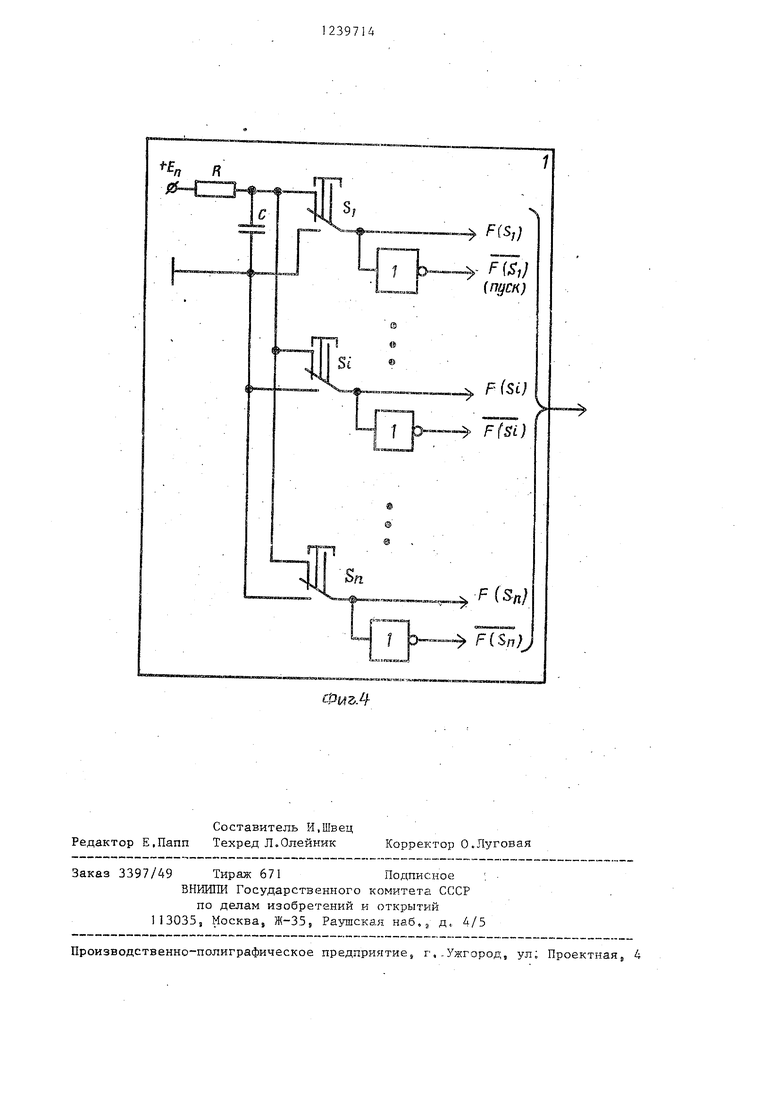
На фиг, 1 представлена структурная схема устройства, .на фиг, 2 - схема блока управления; на фиг, 3 - временные диаграммы работы.устройства , на фиг. 4 - блок формирования входных команд.
Устройство содержит блок 1 формирования входных команд, блок 2 формирования выходных команд, таймер 3, блок 4 управления, блок 5 фиксации аварий, блок 6 постоянной памя- ти , регистр 7, первый дешифратор 8, элементы И 9, элемент ИЛИ 10 счечик 11 импульсов, второй дешифра- тор 12.
Блок 4 управления (фиг, 2) содержит первую группу элементов И 13, вторую группу элементов И 14, элемент 1 5 постоянной памяти адреса. Блок имеет входы 16-20 и выходы 21-24,
Блок 1 (фиг, 4) содержит группу контактных датчиков, имеющих переключающий, замыкающий и размыкающий контакты, резистор, конденсатор, зажимы источника питания, причем перектпо- чающие контакты каждой контактной группы непосредственно и через элемент НЕ подключены к выходам блока, размыкающие контакты всех контактных групп объединены и подключены через резистор к зажиму плюс источника питания,а-замыкающие контакты объединены и подключены к зажиму
минус источника питания, к
зажимам
1
5
0
5
которого через резистор .подключен конденсатор.
Блок работает следующим образом. Формирование запускающего сигнала ничем не отличается от сигналов, сформированных датчиками положения объекта, только нажатие кнопки датчика осуществляется оператором, Сигна- лом, запускаюпщм устройство, является F(S), который и-з блока 1 посту- пает на вход 16 блока 4, откуда на вход 16.1 элемента И 13.1, на другом входе 18.1 которого находится сигнал опроса элемента И 13.1,
Поскольку регистр 7 в исходном состоянии обнулен, то сигнал запроса снимается с инверсного выхода одного из триггеров регистра, например, с первого. Совпадение на входе эле- 13,1 двух сигналов уров.ня приводит к образованию .сигнала 1 на выходе элемента И 13,1, который поступает в элемент 15 постоянной памяти адреса. Элемент 15 из единичного сигнала формирует код .адреса микрокоманды, подлежащей испблне- нию, т,е, выполняет преобразование Вх1 (1) в код Вых1.,,ВыхМ (10©,,,0), а при возбуждении Вх2 () в код
мента И 11111
Бых1,.,Вь1хМ (,,.0), как это следует из конкретного решения блока (фиг, 4),
Время появления и временное разне- сени е микроопераций 18.1 и 18,2 по- казано на временной диаграмме ра.бо- ты устройства (фиг, 3), Б частности, микрооперация 18,1 появляется после включения устройства, а микрооперация 18,2 после выдачи команды на включение объекта управления.
Устройства работает следующим об- .разом,
В исходном состоянии устройство находится в ожидании пускового сигнала. В штатном режиме в исходном СОСТО.ЯНИЙ на йход 18,1 поступает микрооперация опроса элемента И 13,1. При поступлении пускового сигнала Вх, 16,1 на выходе элемента И 13,1 (Вых, 13,-1) имеется сигнал, который вызывает Появление на выходе 21 кода адреса микрокоманды, подлежащей исполнению в данном такте. При этом на выходе 22 имеются внешние микрооперации, запускающие объект управления, на выходе 23 - микрооперации,, запускающие таймер 3 на контрольное время,, соответствующее дли31
тельности работы объекта, на выходе 24 - микрооперация, обнуляющая счетчик 11, а на выход 18,2 поступает внутренняя микрооперация опроса элементов И 13.2 и И 14.2. На выходе . блока 8 появляется сигнал, выбирающи соответствующий элемент И 9. Если объек,т вовремя выполняет заданную ему команду, то очередной сигнал поступает на вход 16.2 и устройство вы дает очередные штатные команды.
При этом на шину 18,1 с регистра 7 поступает микрооперация опроса элемента И 13.1, на другой вход 16,1 которого приходит с блока 1 запуска- ющий устройство сигнал. При совпадении этих двух сигналов на выходе элемента И 13,1 появляется сигнал, который поступает на вход элемента 15 постоянной памяти адреса, который преобразует этот сигнал в код адреса ячейки блока 6 постоянной памяти.
Код с выхода элемента 15 постоянной памяти адреса поступает на вход блока 6, с выхода которого код микро команды, подлежащей исполнению в данном такте, поступает в регистр 7, Код микрокоманды содержит микрооперацию, запускающую соответствующий выход 22 блока 4, откуда она через блок 2 поступает на Harpy3Kyi микрооперацию, запускающую таймер 3, которая с выхода 23 блока 4 поступает на вход таймера 3; микрооперацию, которая производит обнуление счетчика- циклов 1I, которая с выхода 24 блока 4 поступает на установочный вход счетчика 11, микрооперацию,оп- ращивающую внешние входные сигналы, которая поступает на входы элементов И 13,2 и И 14,2. Кроме того, микрокоманда содержит группу разрядов, хранящих код контрольного вращения, который поступает на вход дешифратора 8, на выходе которого появляется сигнал, определяющий величину контрольного времени.
При отказе объекта через контрольное время t на выходе блока 3 появляется сигнал, который через откры- тый дещифратором 8 элемент И 9 появляется на выходах блока 9, блока 10, блока 5 и поступает на вход 17,2, откуда через открытый элемент И 14,2 появляется на выходе 14,2, что вы- зывает появление на выходе 21 кода адреса аварийной микрокоманды, которая содержит микрооперации Вых,22,
j tO
15 20
25
0
5
0 5
14 .4
направляемые на ликвидацию причин
. аварии. С выхода 23 поступают микрооперации, запускающие таймер 3, На выходе 24 сигнал отсутствует, счетчик 11 не обнуляется и в него записывается первое обращение к аварийной подпрограмме.
После нескольких обращений к аварийной подпрограмме, если не удается устранить причины аварии, счетчик 11 выдает сигнал, который дешифратор 12 поступает на .вход 20, что приводит к появлению на выходе 2 кода микрокоманды, которая отключает объект, отключает таймер 3 и обнуляет счетчик 11.
В результате вьтолнения включенным объектом микрокоманды происходит изменение осведомительной информации на выходе блока 1, откуда этот .сигнал поступает на вход 16,2 блока 4 и да- лее на вход элемента И 13,2, на другой вход которого уже подан сигнал запроса Вх, 18,2, При совпадении этих двух-сигналов блок 4 вьфабаты - вает адрес очередной микрокоманды, которая производит перезапуск таймера 3 на другое время или отключает его.
Если до истечения контрольного времени отключения таймера 3 не про-- исходит, то таймер вырабатывает сигнал, который через соответствующий элемент И 9, открытый сигналом дешифратора 8, поступает на вход элемента ИЛИ 10, с вькода которого он noctynaeT на вход счетчика 11, который начинает счет числа операций, длительность которых превышает заданную.
Одновременно сигнал с выхода элемента ИЛИ 10 поступает на вход блока 5, который сигнализирует об аварийной ситуации. Кроме того, сигнал с выхода элемента И 9 поступает на вход 17,2 блока 4, откуда на вход элемента И 14,2, на другой вход которого уже подан сигнал запроса Вх, 18,2,
При совпадении этих двух сигналов блок. 4 вьфабатьшает адрес первой микрокоманды соответствующей аварийной подпрограммы. Аварийные подпрограммы занесены в блок 6 постоянной памяти в процессе программирования, Каждая аварийная подпрограмма содержит набор микрокоманд, направленных на ликвидацию причин, вызвавших аварийную ситуацию. Работа по аварийной микрокоманде происходит так.же, как и при штатной работе. Однако аварийная микрокоманда не содержит микроопераций, обнуляющих счетчик 11.
При работе по аварийной микрокоманде также могут возникнуть аварийные ситуации, тогда цикл повторяется, а содержимое счетчика увеличивается на единицу. Так происходит до. Гех пор, пока не устранятся при- чины аварии или -до заданного числа раз. .
, Наличие автоматического останова программы управления объектом при возникновении аварии позволяет остановить дальнейшее ее распространение .
Кроме того, если устройство вхо- дит в состав автоматизированной системы управления объектом, то его использование облегчит условия .работы оператора, поскольку устройство само принимает решения по устранению неисправностей, аварийному останову программь: и обеспечивает индикацию аварийной ситуации.
Ф. орму ла изо-бретения
1, Микропрограммное устройство для формирования команд-управления
Фиг.1
объектами и контроля их исполнения по авт.ев, № 636608, о т л и ч а- ю щ е с я тем, что, с целью повы- шения надежности в работе, в него введены счетчик импульсов, второй дешифратор, выход которого соединен с третьим входом блока управления, четвертый вход которого подключен к выходу элемента И, .а четвертый вход - к первому входу счетчика импульсов, соединенного вторым входом с выходом элемента ИЛИ.
2. Устройство по п. Ij о т л и - чают;ееся тем, что блок управления содержит первую и вторую группы элементов И, элемент постоянной памяти адреса, . выходы которого соединены с первым выходом бло-. ка управления, первые входы которых подключены к первым входам элементов И первой группы, четвертые входы - к первым входам элементов И второй
группы, вторые входы соответствующих элементов И первой и второй групп объединены и соединены с вторым входом блока управления, третий вход которого подключен к первому
входу элемента постоянной памяти адреса, вторые и третьи входы которого соединены соответственно с вы ходами элементов И первой и второй групп.
Фмг.2 Штатный Аварийный Остановка
режим
режим
Фиг.З
Фиг.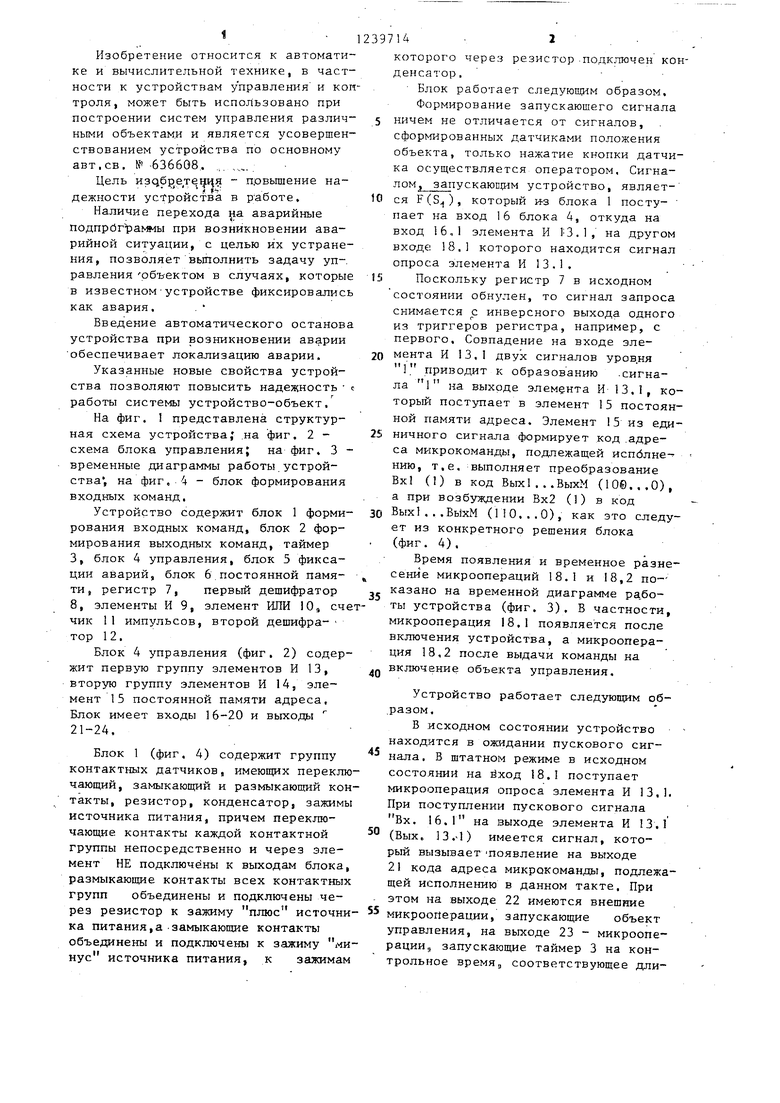

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения операторов | 1987 |
|
SU1492366A1 |
| Микропрограммный процессор | 1982 |
|
SU1070557A1 |
| Микропрограммное устройство для контроля и управления | 1985 |
|
SU1325476A1 |
| Устройство для программного управления и контроля | 1985 |
|
SU1280574A1 |
| Устройство микропрограммного управления | 1988 |
|
SU1536380A1 |
| Устройство для управления и микродиагностики | 1981 |
|
SU968815A1 |
| Микропрограммное устройство управления | 1986 |
|
SU1381506A1 |
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1142832A1 |
| Устройство микропрограммного управления | 1988 |
|
SU1667070A1 |
| Микропрограммное устройство управления | 1979 |
|
SU905818A1 |

Изобретение относится к области автоматики и вычислительной техники, в частности к устройствам управления и контроля,и может быть использовано при построении систем уйравления различными объектами. Цель изобретения - повышение надежности - устройства в работе. Микропрограммное :устройство для формирования команд управления объектами и контроля их исполнения содержит блок формирования входных команд, блок формирования выходных команд, таймер, блок управления, блок фиксации аварий, блок постоянной памяти, регистр, первый дешифратор, элемент И, элемент ИЛИ, счетчик импульсов, второй дешифратор. Данное устройство имеет переход на аварийные подпрограммы при возникновении аварийной ситуации, с целью их устранения позволяет выполнить задачу управления объектом в случаях, которые ранее фиксировались как авария. Введение автоматического останова устройства при возникновении аварии обеспечивает локализацию аварии. Если такое устройство включить в состав автоматизированной системы управления объектом, то его использование облегчит условия работы оператора, поскольку устройство само принимает решения по устранению неисправностей, аварийному останову программы и обеспечит индикацию аварийной ситуации. 1 з,п, ф-лы, 4 ил. « (Л с к СА СО NU 1Ч
| Цифровые вычислительные машины | |||
| - М.: Высшая школа,.1974, с, 218, рис | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
