Изобретение относится к машиностроению и может быть использовано для зачистки поверхности, а так же контроля корпусов машин и агрегатов.
Цель изобретения - расширение кинематических возможностей за счет плавной регулировки движения и надежной фиксации в различных положениях исполнительного органа.
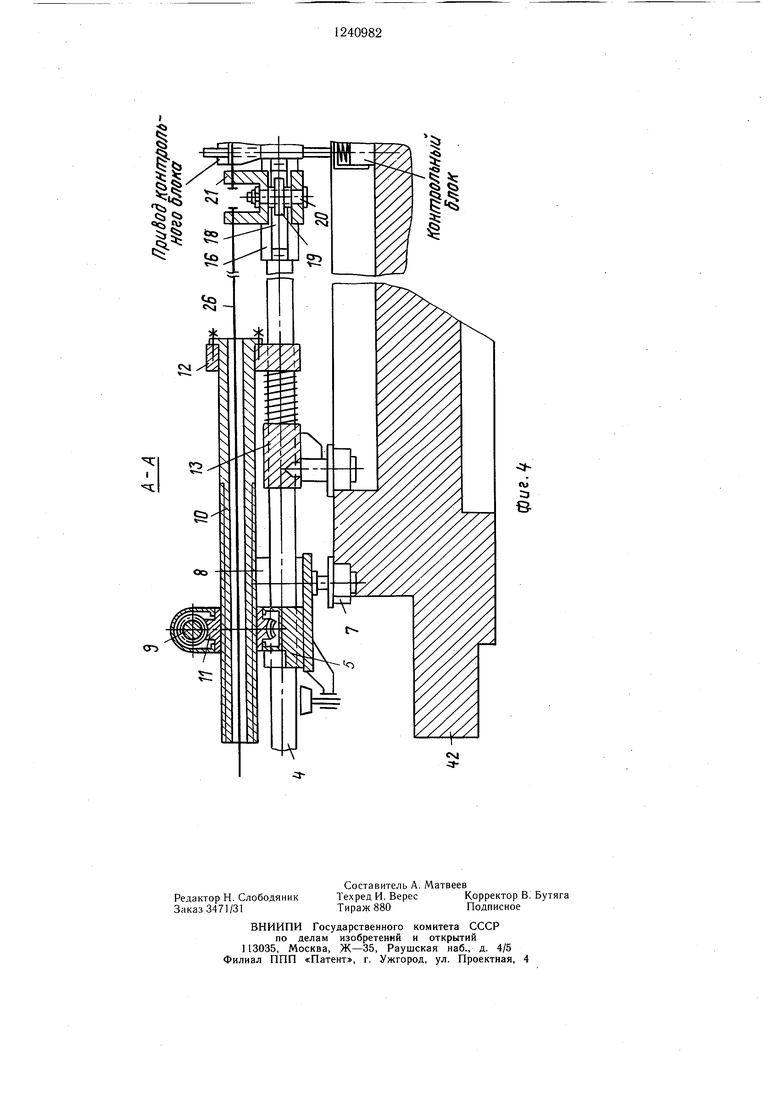
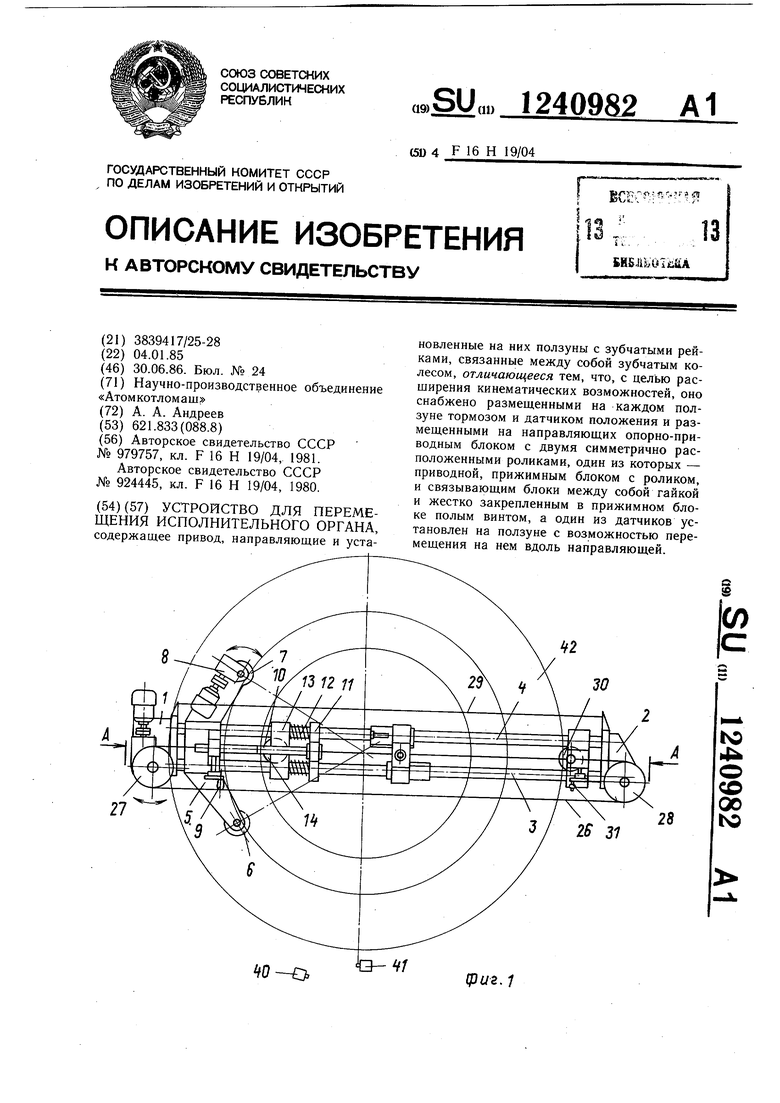
На фиг. 1 изображено устройство, общий
Ролик опорного блока 30 заранее, посредством привода 31, выдвигается на необходимое расстояние, зависящее от {размера выступа диска турбины. Тельфером или кран-балкой устройство перемешается до касания выступа с роликами 6 и 7 опорно-приводного блока 5, при этом с помощью ролика 14 блока 13 происходит центрирование устройства относительно диска турбины при одновременном зажатии конвид; на фиг. 2 - по лзуны с зубчато-реечны- Ю центрического выступа диска с помощью ми механизмами, общий вид; на фиг. 3 - гайки, перемещающейся по винту 10 при эксцентриковый тормоз, общий вид; на фиг. 4 - сечение А-А на фиг. 1.
, Устройство для перемещения исполниработе привода 9 до определенного усилия зажатия, обеспечивающего надежное сцепление роликов б и 7 с поверхностью конттельного органа имеет два кронштейна 1 ролируемого изделия 42. После чего пере- и 2 с направляющими 3 и 4, на которых рас- мещение направляющих 3 и 4 относительно положен с возможностью фиксации опорно- приводной блок 5 с двумя симметрично расположенными роликами 6 и 7, имеющими опорные буртики, при этом ролик 7 снабжен
приводом 8; кроме того, на блоке 5 разме- 20 и фиксируют (фиксаторы, расположенные в щен привод 9, например червячная переда- корпусе блока 5 (не показаны) направляю- ча, колесо которой взаимодействует с полым щие 3 и 4, относительно корпуса блока 5, винтом 10, при помощи винтовой резьбы на при этом ролик опорного блока 30 распола- внутренней поверхности колеса.гается на краю контролируемого изделия с
Полый винт 10 другим концом закреплен , зазором 2-3 мм.
зафиксированного на выступе контролируемого изделия корпуса блока 5 добиваются наиболее рационального расположения устройства над контролируемым изделием 42
на ползуне 11, связанным посредством пружин 12 с прижимным блоком 13, который имеет опорный ролик 14. На направляющих 3 и 4 расположены ползуны 15 и 16 (фиг. 2) снабженные зубчатыми рейками 17 и 18,
Контрольные блоки (не показаны), подвешенные на ползунах 15 и 16, путем перемещения по направляющим 3 и 4 устанавливают над центром контролируемого изделия 42 и прижимают к его по верхности.
имеющими кинематическую связь череззо Заданная величина шага t сканирования
зубчатое колесо 19, свободно расположен-выставляется перемещением датчика 24
ное на оси 20 ползунковой обоймы 21. Пол-положения относительно упора на корпусе
зуны 16 и 15 снабжены каждый своим экс-ползунковой обоймы 21 и датчик фиксицентриковым тормозом 22, 23 и датчикомруется.
24, 25 положения, например микровыклю-В начальный момент шток электромаг- чателем, один из которых (24) установлен35 нита 38 тормоза 23 втянут и ползун 15 подвижно в пазу ползуна 16, а ползунковаяэксцентриками 32 и 33 заторможен отно- обойма 21 имеет упор для взаимодействиясительно направляющей 3, а шток электро- с датчиком 24 и реверсивный привод, вклю-магнита тормоза 22 выдвинут, и ползун 16 чающий бесконечный трос 26 (пропущенныйимеет возможность перемещаться относи- через полый винт 10), барабан 27, натяж- тельно направляющей 4. ной барабан 28, расположенные на конце-При вращении барабана 27 по часовой вых несущих кронштейнах 1 и 2, между ко-стрелке ползунковая обойма 21 тросом 26 торыми натянут трос 29 для подвески ка-перемещается вправо, при этом зубчатое белей и шлангов контрольных блоков; кро-колесо 19, обкатываясь по рейке 17, пере- ме того, на направляющих 3 и 4 расположенмещает ползун 16 вправо на величину двой- опорный блок 30 с роликом, имеющий при-45 ного хода до срабатывания датчика 24 повод 31 для перемещения ролика в вертикаль-ложения, который дает команду на тормо- ном направлении и фиксатор положения бло-жение тормоза 22 и одновременно растор- ка на направляющих (не показан), а тормозы 22 и 23 (фиг. 3) выполнены, например, в виде двух эксцентриков 32 и 33, шарнирно связанных двумя рычагами 34 и 35, с ползуном 36, возвратной пружиной 37 и электромагнитом 38, шток которого соединен с осью 39 ползуна 36; кроме того, в устройство входят два переключамаживает тормоз 23, зубчатое колесо 19, перекатываясь по рейке 18, перемещает JQ ползун 15 на величину двойного хода до
срабатывания датчика 25, который вновь фиксирует тормоз 23 и отпускает тормоз 22. Вращательное движение устройства относительно центра контролируемого изделия осуществляется от привода 8 на угол
теля 40 и 41, устанавливаемых рядом с 55 370-380° по часовой стрелке до срабаты- коитролируемым изделием 42 (фиг. 1).вания конечного переключателя 40, который
реверсирует привод 8. Устройство проворачивается на такой же угол против часовой
Устройство, например, при контроле дисков турбин работает следующим образом.
Ролик опорного блока 30 заранее, посредством привода 31, выдвигается на необходимое расстояние, зависящее от {размера выступа диска турбины. Тельфером или кран-балкой устройство перемешается до касания выступа с роликами 6 и 7 опорно-приводного блока 5, при этом с помощью ролика 14 блока 13 происходит центрирование устройства относительно диска турбины при одновременном зажатии кон центрического выступа диска с помощью гайки, перемещающейся по винту 10 при
ролируемого изделия 42. После чего пере- мещение направляющих 3 и 4 относительно
и фиксируют (фиксаторы, расположенные в корпусе блока 5 (не показаны) направляю- щие 3 и 4, относительно корпуса блока 5, при этом ролик опорного блока 30 распола- гается на краю контролируемого изделия с
зафиксированного на выступе контролируемого изделия корпуса блока 5 добиваются наиболее рационального расположения устройства над контролируемым изделием 42
зазором 2-3 мм.
Контрольные блоки (не показаны), подвешенные на ползунах 15 и 16, путем перемещения по направляющим 3 и 4 устанавливают над центром контролируемого изделия 42 и прижимают к его по верхности.
В начальный момент шток электромаг- нита 38 тормоза 23 втянут и ползун 15 эксцентриками 32 и 33 заторможен отно- сительно направляющей 3, а шток электро- магнита тормоза 22 выдвинут, и ползун 16 имеет возможность перемещаться относи- тельно направляющей 4. При вращении барабана 27 по часовой стрелке ползунковая обойма 21 тросом 26 перемещается вправо, при этом зубчатое колесо 19, обкатываясь по рейке 17, пере- мещает ползун 16 вправо на величину двой- ного хода до срабатывания датчика 24 положения, который дает команду на тормо- жение тормоза 22 и одновременно растор-
маживает тормоз 23, зубчатое колесо 19, перекатываясь по рейке 18, перемещает ползун 15 на величину двойного хода до
срабатывания датчика 25, который вновь фиксирует тормоз 23 и отпускает тормоз 22. Вращательное движение устройства относительно центра контролируемого изделия осуществляется от привода 8 на угол
стрелки до срабатывания конечного переключателя 41 и снова реверсируется, т. е. провода, кабели и шланги с водой (не показаны), которые подвешивают над изделием на поворотной консоли, не переключаются.
Предлагаемая конструкция устройства обеспечивает плавную регулировку шага сканирования в широком диапазоне. Шаг
сканирования равен расстоянию между упо- ю простую фиксацию устройства на контроли- ром ползунковой обоймы и кнопкой датчика руемом изделии.
положения, который имеет возможность пе- ремешения вдоль корпуса ползуна и фиксирования в любом месте направляющего паза, причем контрольные блоки на ползунах располагаются на соседних полосах сканирования и при работе шагового механизма каждый перемешается на двойной шаг, т. е. вся поверхность изделия контролируется вдвое быстрее. Устройство обеспечивает самоцентрирование, надежную и
25
tpui. 2
Э|л
77 1511 23
32
(/6)
33
3W
36
фиг.З
r
$J
cv
:э
e

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
| Устройство для ультразвукового контроля вертикально расположенных корпусов энергетического оборудования | 1988 |
|
SU1563395A1 |
| Устройство для прививки черенков | 1984 |
|
SU1212364A2 |
| Устройство для дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности | 1989 |
|
SU1640634A1 |
| Устройство для изготовления арматурных петель из проволоки | 1986 |
|
SU1359050A1 |
| Стенд для проверки углов установки управляемых колес транспортного средства | 1981 |
|
SU1000825A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2022672C1 |
Составитель A. Матвеев Техред И. ВересКорректор В. Бутяга
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Реечный механизм делительного приспособления | 1981 |
|
SU979757A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Зубчато-реечный механизм | 1980 |
|
SU924445A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
