Изобретение относится к микропрограммным устройствам управления и наиболее эффективно может использовано в вычислительной технике, например в ЭВМ, при построении управляющих систем, а также микропрограммных автоматов и особенно эффективно при использовании микрокоманд с соизмеримыми адресными и операционными частями ,
Целью изобретения является сокращение объема оборудования за счет такого аппаратного построения каждого варианта устройства, которое позволяет в каждом из них исполь зовать единый способ адресации как условных так и неусловных м укрокоманд.
На фиг.1 приведена функциональная схема первого варианта выполнения устройства; на фиг. 2 - функщюналь- ная схема второго варианта вьтолне- ния устройства; на фиг.З - временная диаграмма работы первого варианта выполнения устройства; на фиг,. 4 - временная диаграмма работы второго ва- рианта вьтолнения устройства.
Микропрограммное устройство управления по первому варианту (фиг.1) содержит блок 1 постоянной памяти микрокоманд, вход которого соединен с выходом счетчика 2 адреса, а выход - с информационными входами регистра 3 микрокоманд и счетчика 2 адреса, ryльтиплeкcop 4 условий, выход которого соединен с одним из входов элемента И 5, элемент , И 6, один из входов которого соединен с выходом элемента НЕ 7, вход которого соединен с выходом мультиплексора 4 усл:овий, и элемент ИЛИ 8, один из входов которого соединен с выходом элемента И 5, а выход - с входом +1 счет ика 2 адреса, вход установки в О которого является входом 9 запуска устройства. Устройство имеет также синхро- вход 10 первого тактового сигнала, соединенный с входом записи (синхро- входом) регистра 3 микрокоманд, син- хровход 11 второго тактового сигнала соединенный с вторым входом элемента 8, синхровход 2 третьего Тестового сигнала, соединенный с вторыми входами элементов-И 5 и 6, группу входов 13 условий, соединенную с входами условий (информационными входами) мультиплексора 4, и информационный выход 14, соединенный с второй группой выходов регистра 3.
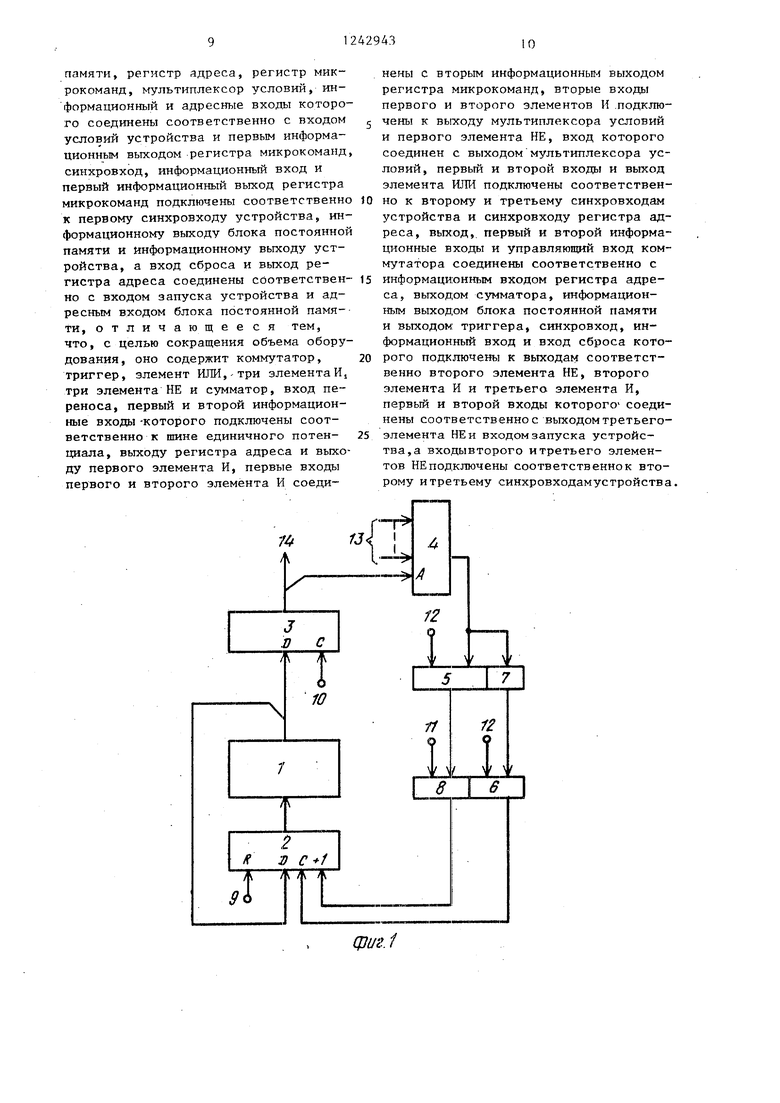
Микропрограммное устройство управления по второму варианту содержит (фиг.2) блок 1 постоянной-памяти, информационный выход которого соединен с информационным входом регистра 3 микрокоманд, мультиплексор 4 условий, адресный вход которого соединен с группой выходов регистра 3 микрокоманд, а выход - с одним из входов
0 элемента И 5 непосредственно, а с одним из входов элемента И 6 - через элемент НЕ 7. Устройство содержит также элемент ИЛИ 8 и ;нмеет вход 9 начального за5 пуска, с:ннхровходы 10, 11 и 12 соответственно пер)зого, второго и третье - го тактовых сигналов, группу входов 13 условий, соединенных с информаци- онными входами мультиплексора 4, ин0 формационный в,гход 14, соединенный с группой выходов регист.ра 3 микрокоманд, регистр 15 адреса, информационный вход которого соединен с информа- ционш)1м выходом коммутатора 16, а
5 рход параллельной записи (синхровход) - с выходом элемента 8, сумматор 17, выход которого соединен с первым информационным входом коммутатора 16, триггер 18, единичный выход
0 которого соединен с управляющим входом коммутатора 16, второй информационный вход которого соединен с выходом блока 1 памяти; Устройство имеет, кроме того,, элементы НЕ 19 и 20,
5 управляюпщй вькод 21, соединенный с выходом элемента И 6 и информационным входом триггера 18, и элемент И 22.
Микропрограммное устройство управления по первому варианту работает слёдующШ 1 образом.
При поступл€ нии сигнала запуска по входу 9 устройства счетчик 2 адреса устанавливается в нулевое состояние. По нулевому выходному состоянию
счетчика 2 в блоке 1 памяти выбирается нулевая л шейка (ячейка), содержимое которой с выхода блока 1 поступает на информационные входы регистра 3 и счетчика 2. При этом по входу 10 устройства на вход параллельной записи (синхровход) регистра 3 поступает тактовый сигнал Си1 (фиг.З), по которому содержимое нулевой Л1гнейки блока 1 переписьшается в
5 регистр 3. Причем, пока на входе 9 устройства присутствует сигнал запуска, никакие тактовые сигналы, кроме Си, в устройство не поступают.
Рассмотрим работу устройства (вариант 1) при выполнении неусловной микрокоманды. При снятии сигнала запуска с входа 9 устройство синхронизации (не показано) начинает вьфаба- тьгеать последующие тактовые сигналы. При поступлении на вход 11 второго тактового сигнала Си2 (из устройства синхронизации) содержимое счетчика 2 увеличивается на единицу. Сформированный таким образом в счетчике 2 адрес представляет собой адрес следующей микрокоманды текущей микропрограммы, по которому в блоке 1 выбирается следующая линейка (микрокоманда) . Содержимое этой линейки поступает на информационный вход регистра 3 и по Си1 (вход 10 устройства) пере- письгоается в регистр 3. Следовательно, смена микрокоманд в микропрограммном .устройстве управления происходит по тактовому сигналу Си1, поступающему по входу 10 устройства, а цикл микрокоманды в этом случае включает два тактовых сигнала: Си1 и Си2.
Рассмотрим процесс формирования адреса следзпощей микрокоманды для случая, когда вьтолняемая микрокомана условная. При этом код условия выполняемой микрокоманды с выхода регистра 3 поступает на адресный вход (вход А) мультиплексора 4. Одновреенно код условия с выхода 14 постуает в устройство синхронизации, в езультате чего на выходе устройства инхронизации за вторым тактовым сигналом Си2 формируется третий такто- вый сигнал СиЗ, который поступает на один из входов элементов 5 и 6 и имеет длительность, меньшую, чем время выборки очередной линейки в блоке 1. При выполнении условной микрокоманды в устройстве возможны две ситуации: условие выполняется или не вьшолняет- ся.
Условие выполняется, если коду, поступающему с выхода регистра 3 на адресный вход мультиплексора 4, соответствует сигнал логической 1 на соответствующем входе из группы входов 13 условий устройства. В этом случае при поступлении тактового сигнала Си2 по входу 11 устройства на один из входов элемента 8 на выходе последнего появляется сигнал логической 1 с длительностью, равной длительности второго тактового сигнала Си2. Значение счетчика 2 увеличивается на единицу. Так как условие выполняется, то на выходе мультиплексора 4 присутствует сигнал логической 1. С поступлением следующего
5 (третьего) тактового сигнала СиЗ по выходу 12 устройства значение счетчика 2 увеличивается (во второй раз на данной микрокоманде) на единицу. Таким образом, за один машинный цикл
10 содержимое счетчика 2 увеличивается на два. И это увеличенное на два содержимое счетчика 2 является адресом следующей микрокоманды для случая, когда выполняемая микрокоманда yets ловная и данное условие выполняется. Если условие не выполняется, т.е. код условия с выхода регистра 3 на адресный вход мультиплексора 4 и вход устройства синхронизации посту20 пает, а на соответствующем входе из группы входов 13 сигнал логической I отсутствует, при поступлении тактового сигнала Си2 на вход элемента 8 сигнал логической 1 с выхода эле5 мента 8 постзтает на вход -ь счетчика 2 и увеличивает его содержимое на единицу. По данному выходному состоянию счетчика 2 в блоке 1 выбирает- . ся соответствующая линейка, содержи0 мое которой поступает на информационные входы регистра 3 и счетчика 2. При поступлении третьего тактового сигнала СиЗ по входу 12 устройства на выходе элемента И 5 сохраняется сигнал логического О, а на выходе элемента И 6 устанавливается сигнал логической I, который поступает на вход параллельной записи счетчика 2, по которому содержимое выхода блока
„ 1 переписьшается в счетчик 2 по его информационному входу.Сформированный таким образом в счетчике 2 адрес представляет собой адрес следующей за вьшолняемой микрокоманды для слу- 5 чая, когда выполняемая микрокоманда условная, но условие не вьтолняется. По этому адресу в блоке 1 выбирается соответствующая линейка, которая может располагаться фактически в любом Q месте блока 1.
Устройство обеспечивает также возможность организации безусловных переходов . В этом случае используется один из входов входов 13 и, 5 следовательно, код, соответствующий этому входу.
Устройство по второму варианту работает следующим образом.
5
Сигнал запуска по входу 9 устройства устанавливает регистр 15 в исходное состояние, а триггер 18 - в нулевое состояние. По исходному выходному состоянию регистра 15 в блоке 1 выбирается соответствующая линейка (микрокоманда) , содер;гсимое ко- ,торой поступает на информационный вход регистра 3 и на один из информационных входов коммутатора 16, В момент запуска устройства в него поступают только тактовые сигнгзлы Си (фиг,4), По переднему фронту тактового сигнала Си1 по входу 10 содержимое выхода блока 1 переписьпзается в регистр 3 и поступает на 14 устройства. Код исходного состояния на выходе регистра 15 устанавливающийся в нем в момент запуска устрой- .ства, поступает, кроме того, на группу входов А сумматора 17. При этом выходное состояние сумматора представляет собой арифметическ /ю сумму сигналов, поступающих на его информационные входы А и В и вход переноса Р, т, е, А + В + 1 ,
Микрокоманды, закодированные в блоке 1 и поступающие в регистр 3, делятся на условные и неусловные. При вьшоянении неусловной микрокоманды на выходах 2-3 регистра 3 присутствует сигнал логического О, а при выполнении условной микрокоманды - сигнал логической 1, при этом код условия на входе 13 может присутствовать или отсутствовать (I или О),
Рассмотрим работу устройства для случая, когда выбранная и переписанная по Си в регистр 3 микрокоманда .неусловная, т.е, признак условия на выходах 2-3 равен логическому О, Следовательно, ка группе входов Б сумматора 17 и на информационном входе триггера 18 присутств тот сигналы логического О, Нулевое выходное состояние триггера 18 переключает выход коммутатора 16 на его вход 16-2, следовательно, на информационном входе регистра 15 присутствует выходное состояние сумматора 17, которое paSHo в этом случае А + Р, т,е. А .+ 1, и представляет собой увеличенный на единицу адрес вьшолняе- мой микрокоманды, -Сформированный таким образом адрес следующей микроко- .чанды с поступлением переднего фронта тактового сигнала Си2 через регистр 15 поступает на вход блока 1 ;утя выбора следующей микрокоманды, 5 фронтом тактовый сигнал Си2 подтверждает нулевое выходное состояние триггера 18, Следовательно, при вьтолнении неусловной микрокоманды осуществляется естественный (по +1) iO способ адресации, т.е. адрес следующей микрокоманды равен увеличенному на единицу адресу выполняемой микрокоманда. Смена микрокоманд в устройстве в этом случае происходит по так- 5 товому сигналу Си1, поступающему на вход пар.зллельнрй записи регистра 3, а цикл микрокоманды включает два тактовых сигнала: Си1 и Си2.
При вьтолнении условной микроко0 манды на выходах 2-3 регистра 3 присутствует сигн.ал логической 1, а код условия на входе 13 присутствует или отсутствует (условие вьшолняется 1-ши не вьшолняется) , Пусть условие
на входе 13, соответствующее коду условия, поступающему на адресный вход мультиплексора 4, отсутствует. На выходе г гультиплексора 4 условий в этом случае присутствует сигнал логическо0 го О, В результате на выходе элемента И 5 присутствует сигнал логического О, который поступает на младший разряд группы входов В сумматора 17, а на выходе элемента И 6
5 присутствует сигнал логической 1, поступарций на информационный вход триггера 18 и на управляющий выход 21 устройства. Только при наличии сигнала логической 1 на выходе 2I
0 устройства устройство синхронизации вырабатьгоает следующий (третий) тактовый сигнал, поступающий в устройство вслед за Си2. С поступлением Си2 по входу 1 устройства код выходного
5 состояния сумматора 17 равный А +1, через коммутатор 16 поступает на информационный вход регистра 15 и по переднем г фронту Си2 переписьшается в него. Задним фронтом Си2 триггер
0 18 переключается в единичное состояние, так как на его информационном входе присутствует сигнал, логической 1, Единичное состояние триггера 18 переключает выход коммутатора 16 на
5 его вход 16-1. Код выходного состояния блока 1 представляет собой в этот момент содерясимое линейки, выбранной в блоке 1 по последнему выход
ному состоянию регистра 15, равному А + 1, Этот код выходного состояния блока 1 по входу 16-1 коммутатора 16 поступает на информационный вход ре- гистра 15. С поступлением следзтощего тактового сигнала СиЗ по входу 12 устройства на вход параллельной записи регистра 15 код выходного состояния блока 1 переписьшается в регистр 15 и поступает на вход блока 1 для выбора операционной части следующей микрокоманды. Одновременно (по СиЗ) триггер 18 возвращается в исходное состояние.
Таким образом при вьтолнении условной микрокоманды и отсутствии условия на входе 13 адрес следующей микрокоманды выбирают в блоке памяти 1 по увеличенному на единицу адресу вьтолняемой микрокоманды, а затем по полученному таким образом адресу следующей микрокоманды выбирают в блоке 1 операционную часть зтой микрокоманды. Смена микрокоманд в блоке 1 происходит в зтом случае по тактовому сигналу Си1, поступающему по входу 10 устройства на вход параллельной записи регистра 3, а цикл микрокоманды в этом случае включает три тактовых сигнала: Си 1, Си2 и СиЗ.
Рассмотрим работу устройства при вьтолнении условной микрокоманды для случая, когда условие, соответствующее коду условия, поступающему на ад- ресньй вход мультиплексора 4, няется, т.е. на выходе мультиплексора 4 присутствует сигнал логической 1. Предположим, что микрокоманда, выбранная и переписанная по переднему фронту Си1 в регистр 3, условная, т.е. на выходах 2-3 регистра 3 присутствует сигнал логической 1. В результате на выходе элемента И 5 устанавливается сигнал логической 1, который поступает на младщий разряд группы входов В сумматора 17, остальные разряды этой группы входов соединены постоянно с щиной нулевого потенциала устройства (т.е. равны логическому О). На выходе элемента И 6 присутствует сигнал логического О, который поступает на информационный вход триггера 18 и на управляющий выход 21 устройства. Выходное состоя- ние сумматора 17 в этом случае равно ,А + В «- Р, т.е. равно А + 2. С поступлением тактового сигнала Си2 по
20
5
jg t5
5
0
5
0
5
0
входу II устройства содержимое сум- т матора 17 через коммутатор 16 перепи- сьтается по переднему фронту Си2 в регистр 15 и поступает на вход блока I для выбора следующей микрокоманды.
Таким образом при выполнении условной микрокоманды для случая, когда условие на входе 13 присутствует, адрес следующей микрокоманды формируют путем увеличения на два адреса выполняемой микрокоманды. Смена микрокоманд в блоке I происходит в этом случае также по Си 1, а цикл микрокоманды включает два тактовых сигнала: Си1 и Си2.
Формула изобретения
1. Микропрограммное устройство управления, содержащее блок постоянной памяти, счетчик адреса, регистр микрокоманд, мультиплексор условий, информационный и адресный входы которого соединены соответственно с входом условий устройства.и информационным выходом регистра микрокоманд синхро- вход, информационный вход и информационный выход регистра микрокоманд подключены соответственно к первому синхровходу устройства, информационному выходу блока постоянной памяти и информационному выходу устройства, а информационньтй вход, выход и вход сброса счетчика адреса соединены соответственно с информационным выходом и адресным входом блока постоянной памяти и входом запуска устройства, отличающееся тем, что, с целью сокращения объема оборудования, оно содержит два элемента И, элемент ИЛИ и элемент НЕ, причем выход мультиплексора условий подключен к входу элемента НЕ и первому входу первого элемента И, выход которого соединен с первым входом элемента ИЛИ, второй вход и выход которого подключены соответственно к второму синхровходу устройства и счетному входу счетчика адреса, первый вход и выход второго элемента И соединены соответственно с выходом элемента НЕ и входом параллельной записи счетчика адреса, а вторые входы первого и второго элементов И подключены к тре- тьему синхровходу устройства.
2. Микропрограммное устройство управления, содержащее блок постоянной
памяти, регистр адреса, регистр микрокоманд, fyльтиплeкcop условий, информационный и адресные входы которого соединены соответственно с входом условий устройства и первым информационным выходом регистра микрокоманд синхровход, информационный вход и первый информационный выход регистра микрокоманд подключены соответственно к первому синхровходу устройства, информационному выходу блока постоянной памяти и информационному выходу устройства, а вход сброса и выход регистра адреса соединены соответствен- но с входом запуска устройства и адресным входом блока постоянной памяти, отличающееся тем, что, с целью сокращения объема оборудования, оно содержит коммутатор, триггер, элемент ИЛИ,-три элемента И i три элемента НЕ и сумматор, вход переноса, первый и второй информационные входы -которого подключены соответственно к шине единичного потен- циала, выходу регистра адреса и выходу первого элемента И, первые входы первого и второго элемента И соединены с вторым информационным выходом регистра микрокоманд, вторые входы первого и второго элементов И .подключены к выходу мультиплексора условий и первого элемента НЕ, вход которого соединен с выходом мультиплексора условий, первый и второй входы и выход элемента ИЛИ подключены соответственно к второму и третьему синхровходам устройства и синхровходу регистра адреса, выход, первый и второй информационные входы и управляющий вход коммутатора соединены соответственно с информационным входом регистра адреса, выходом сумматора, информацион- выходом блока постоянной памяти и выходок триггера, синхровход, информационный вход и вход сброса которого подключены к выходам соответственно второго элемента НЕ, второго элемента И и третьего элемента И, первый и второй входы которого соединены соответственное выходом третьего- элемента НЕн входом запуска устройства, а входывторого и третьего элементов НЕподключены соответственнок второму и третьему синхровходамустройства
фи-г.1
Фиг, г
- -ПЛЛ1тш1Ш1 1пллллжш.
П Лn n rLJLJI
.LfmrLJ JL flП Л Л Г
Л
. л
-- t jyiJl-J1
///7I-- --
(f/e.J
jmimiuirijirinjiJiJiaii ,
JL
Jl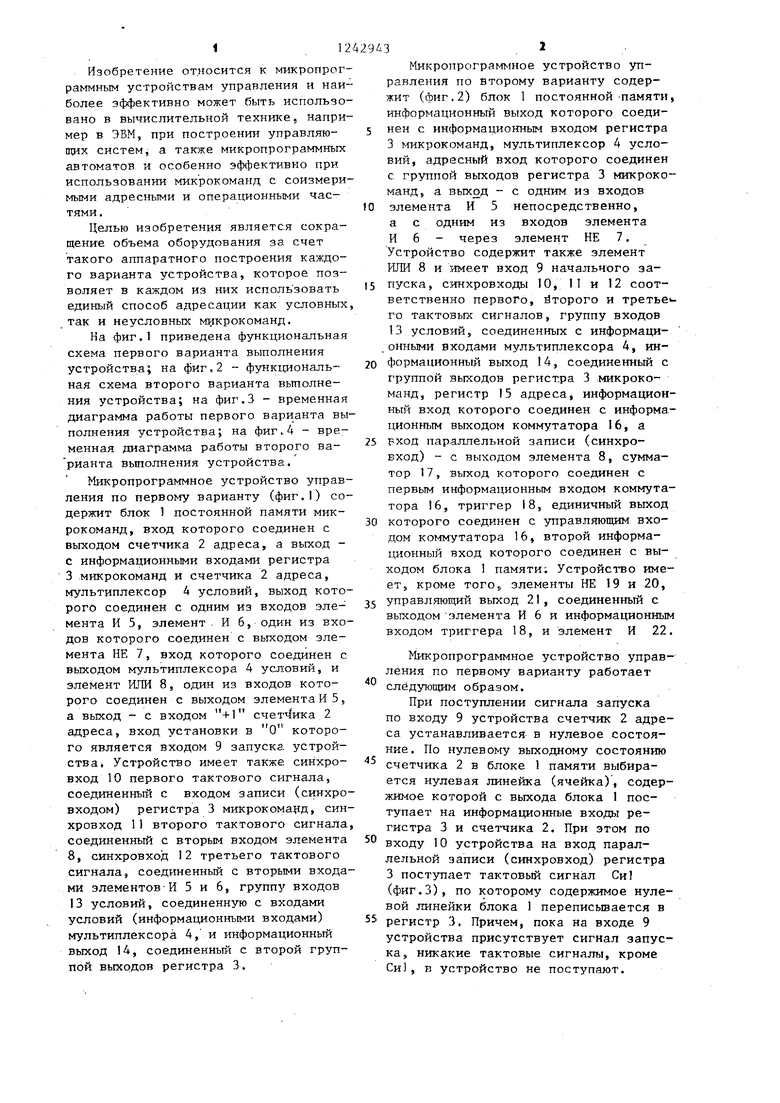



| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления | 1984 |
|
SU1304022A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1293729A1 |
| Микропрограммное устройство управления | 1987 |
|
SU1429114A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1304021A1 |
| Микропрограммное устройство управления (его варианты) | 1984 |
|
SU1159020A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1275441A1 |
| Микропрограммное устройство управления с контролем | 1984 |
|
SU1280627A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1130865A1 |
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1140121A1 |
| Мультимикропрограммное устройство для контроля и управления | 1984 |
|
SU1249513A1 |

Изобретение относится к микропрограммным устройствам управления и может быть использовано при построении управляющих систем и микропрограммных автоматов. Целью изобретения является сокращение объема оборудования. С этой целью первый вариант выполнения устройства содержит, кроме блока постоянной памяти, счетчика адреса, регистра микрокоманд и мультиплексора условий, также два элемента И, элемент ИЛИ и элемент НЕ. Второй вариант устройства содержит, кроме блока постоянной памяти, регистра адреса, регистра микрокоманд и муль- типлексора условий, также коммутатор, триггер, элемент ИЛИ, три элемента И, три элемента НЕ и сумматор.. 2 с.п. ф-лы, 4 ил. i (Л 4 1C СО 4 00
| Майоров С.А., Новиков Г.И | |||
| Принципы организации цифровых машин.- М.: МашинострЬение, 1974, с.215-216, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Майоров С.А., Новиков Г.И | |||
| Принципы организации цифровых машин.- М.: Машиностроение, 1974, с | |||
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
