2. .Устройство управления процессом элеваторной обработки шариков между призкимным и приводным рабочими инструментами, содержащее приводы вращения рабочего инструмента и элеватора датчик и задатчик, соединенные с устройством сравнения, выход которого связан через усилитель с приводом вращения элеватора, о т- личающееся тем, что, с целью улучшения качества и повьтше- ния производительности процесса в качестве датчика использован датчик мощности, соединенньй с приводом вращения рабочего инструмента, и в устройство дополнительно введены блок пуска схемы, связанный с задатчиком мощности, включенные последовательно между усилителем и приводом вращеИзобретение относится к мааино- строению, преимущественно к подшипниковой промьшшенности, и может быть использовано при обработке шариков.
Цель изобретения - улучшение качества шариков и повышение производительности процесса элеваторной обработки путем поддержания постоянной оптимальной мощности, затрачиваемой на резание.
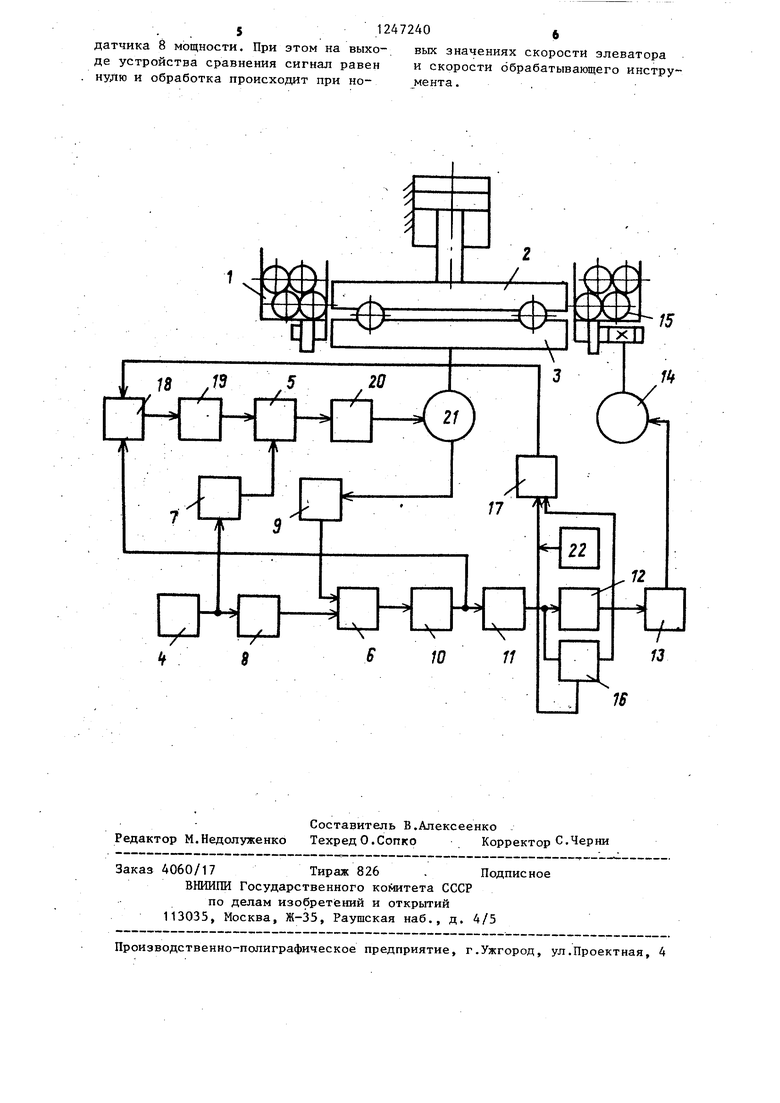
На чертеже изображена принципиальная схема устройства управления процессом элеваторной обработки шариков.
Способ управления процессом элеваторной обработки шариков заключается в следующем.
В процессе обработки непрерывно контролируется мощность приводного электродвигателя и при ее изменении сигналом рассогласования регулируют скорость вращения элеватора для обеспечения максимально допустимой загрузки рабочей зоны станка. При достижении заранее -установленного предельного значения скорости элеватора и наличия сигнала рассогласования изменяют скорость вращения обрабатывающего инструмента до тех пор, пока сигнал рассогласования не станет равным нулю. Последующая обработка происходит при новых значениях скорости эления элеватора релейньй элемент, первый интегратор, усилитель и первый преобразователь, включенные последовательно между блоком пуска схемы и приводом вращения рабочего инструмента задатчик уставки скорости вращения рабочего инструмента, сумматор и второй преобразователь, соединенны последовательно компаратор, ключ, второй вход которого соединен с релейным элементов, и второй интегратор, выход которого связан с сумматором, ограничительным элементом, установленным между первым интегратором и первым преобразователем, связанным с входом компаратора, другие входы которого связаны также с выходами усилителя и введенного задат- чика уставки ограничения.
ватора и обрабатывающего инструмента, а при появлении сигнала рассогласования цикл изменения скорости повторяется.
Величина оптимальной предельной скорости элеватора устанавливается заранее экспериментальным путем и зависит от ряда факторов, в частности объема рабочей зоны, диаметра шариков, условия входа их в зону обработки и т.д. Эта величина не может быть сразу задана, так как в начале процесса шарики не обработаны и силы трения, затрачиваемые на их скольжение в рабочей зоне, а следовательно, и мощность, потребляемая приводным электродвигателем, имеют максимальное значение. Поэтому в этот период для поддержания постоянной мощности подача шариков в зону обработки, а следовательно, и скорость элеватора должны, быть меньше предельного значения. Затем по мере съема припуска
уменьшается шероховатость обрабатываемых шариков и происходит износ общей ;уги контакта их с инструментами, что в конечном итоге приводит к умень-.
шению потребляемой мощности, для поддержания которой необходимо соответственно увеличить количество шариков в рабочей зоне, путем изменения скорости вращения элеватора.
Устройство управления процессом обработки шариков 1 между прилоим- ным 2 и обрабатывающим 3 инструмен- тами содержит блок пуска схемы 4, сумматор 5 и устройство 6 сравнения которые связаны соо- ветственно с за датчиком уставки Скорости обрабатывающего инструмента 7 и задатчи- ком 8 мощности. Вход устройства 6 сравнения связан с датчиком 9 мощноти, а вьпсод через релейньй элемент 10, первый интегратор 11 и уси литель 12 - с первым преобразовате- лем 13, управляющим через двигатель 14 скоростью элеватора 15. Огрничительный элемент 16 связан с входом компаратора 17, выход которого в свою очередь соединен через ключ 1 второй интегратор. 19 и сумматор 5 со вторым преобразователем 20, упраляющим двигателем вращения инструментального диска 21.
Усилитель 12 представляет собой операционш 1й усилитель ОУ, включен- .ный по схеме усилителя, цепь обратной связи которого шунтирована ограничительным элементом 16. Ограничительный элемент 16 может быть выпол- нен, например, по схеме, содержащей транзистор, коллектор которого подключен к вхСду усилителя 12, эмиттер подключен.к аноду диода, катод которого подключен к выходу усилителя 12. На базу транзистора подается С выхода .задатчика уставки ограничения (ЗУО) 2,2 сигнал ограничения.
Ограничительный элемент работает следующим образом.
Пока сигнал на выходе усилителя 12 по абсолютной величине меньше сигнала ЗУО, то усилитель работает в линейной зоне в режиме усилителя, Как только сигнал на выходе по абсо- лютной величине станет больше сигнала ЗУО, транзистор открывается и усилитель переходит в режим ограничения выходного сигнала. I
Компаратор 17 может быть выпол- нен, например, на основе операционного усилителя. На инвертирующий выход компаратора 17 подается отрицательный сигнал с выхода задатчика установки ограничения ЗУО. На неин- вертирукнций вход компаратора подается отрицательный сигнал с выхода усилителя 12. Если сигнал на инверти
s 0 . 15 0
5 0
j
0 5
5
0
рующем входе по абсолютной величине больше, чем на неинвертирующем, на выходе компаратора 17 присутствует положитель ый сигнал и ключ 18 разомкнут. Когда сигнал на инвертирующем входе компаратора 17 станет меньше по абсолютной величине, чем на неинвертирующем, то на выходе компаратора появляется отрицательный сигнал , приводящий к замыканию ключа.
Задатчик установки ограничения 22 может быть вьшолнен, например, потен- циометрическим, причем потенциометр подключается к отрицательной шине
источника питания.
1
Устройство работает следукмцим образом.
Включение системы управления происходит нажатием кнопки в блоке 4 пуска. При этом на вход сумматора 5 и устройства 6 сравнения подаются соответственно сигналы задания скорости обрабатьгоающего инструмента 3 от задатчика 7 уставки скорости и мощности резания от задатчика 8. Датчик 9 мощности фиксирует потребляет мую мощность и подает сигнал на вход устройства 6 Сравнения. На выходе устройства 6 сравнения появляется положительный сигнал, который приводит к срабатыванию релейного элемента 10 и появлению на его выходе ступенчатого сигнала. Первый интегратор 11 начинает интегрировать сигнал, который через усилитель 12 поступает в первый преобразователь 13, который плавно изменяет скорость элеватора 15. Скорость элеватора 15 увеличивается до тех пор, пока усилитель 12 не войдет в режим ограничения, устанавли- ваемьй ограничительным элементом 16. Щ)и этом на выходе компаратора 17 появляется сигнал, приводящий к от- крьюанию ключа 18. В результате второй интегратор 19 подключается к выходу релейного элемента 10 и на его выходе появляется сигнал, который суммируется с сигналом задания скорости обрабатывающего инструмента 3. В результате через второй преобразователь 20 сигнал поступает в двигатель обрабатывающего инструмента 21 и скоростью его увеличивается до тех пор, пока сигнал с выхода датчика 9 мощности rie станет равным сигналу за512472406
датчика 8 мощности. При этом на выхо- вых значениях скорости элеватора де устройства сравнения сигнал равен и скорости обрабатывающего инстру- нулю и обработка происходит при но- мента. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| Установка для электроэрозионного легирования | 1987 |
|
SU1549685A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| Устройство для управления инвертором | 1984 |
|
SU1259446A2 |
| Устройство для электроэрозионного легирования | 1988 |
|
SU1664486A1 |
| Способ автоматического управления процессом элеваторной обработки шариков и устройство для его осуществления | 1982 |
|
SU1079410A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
1. Способ управления процессом элеваторной обработки шариков, включающий регулирование скорости подачи шариков в рабочую зону пропорционально сигналу рассогласования контролируемого параметра процесса, отличающийся тем, что, с целью улучшения качества и повьштения производительности процесса, в качестве контролируемого параметра принимают мощность приводного электродвигателя и при достижении максимально допустимого значения скорости подачи шариков регулируют скорость вращения обрабатыванЗщего инструмента. с € ю 4 ЬО 4
/
Составитель В.Алексеенко Редактор М.Недолуженко Техред О.Сопко Корректор С,Черни
Заказ 4060/17 Тираж 826 . Подписное ВНИИПИ Государственного комитета СССР
по делан изобрет;ений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Способ автоматического управления процессом элеваторной обработки шариков и устройство для его осуществления | 1982 |
|
SU1079410A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
