(54) ОЧУВСТВЛЕННЫЙ ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Захват очуствленного манипулятора | 1978 |
|
SU709357A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
| Манипулятор | 1975 |
|
SU524686A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
t
Изобретение относится к машиностроению, а именно к манипуляторам для работ в зонах радиоактивного излучения, под водой, в космосе и т.д., где требуется обратная связь по усилию.
Известен очувствленный захват манипулятора, содержащий задаквдее устройство-, систему управления и исполнительный механизм, имеющий корпус, привод перемещения губок захвата, выходной вал которого кинематически связан с механизмом перемещения губок, датчик измерения усилия, выполненный в виде упругого элемента и датчика обратной связи, а также датчик положения губок захвата, кинематически связанный с указанным валом Til.
Однако в указанном захвате при управлении от задающего устройства возникают ошибки измерения усилия при захвате предметов различных габаритов вследствие непостоянства передаточной функции механизма перемещения губок захвата.
Цель изобретения - повышение точности очувствления захвата, т.е. повышение точности измерения усилия
во всем диапазоне размеров захватываемых предметов.
Цель достигается тем, что очувствленный захват манипулятора снабжен корректирующим функциональным блоком, вход которого соединен с датчиком положения губок захвата, а выход - с датчиком обратной.связи.
0
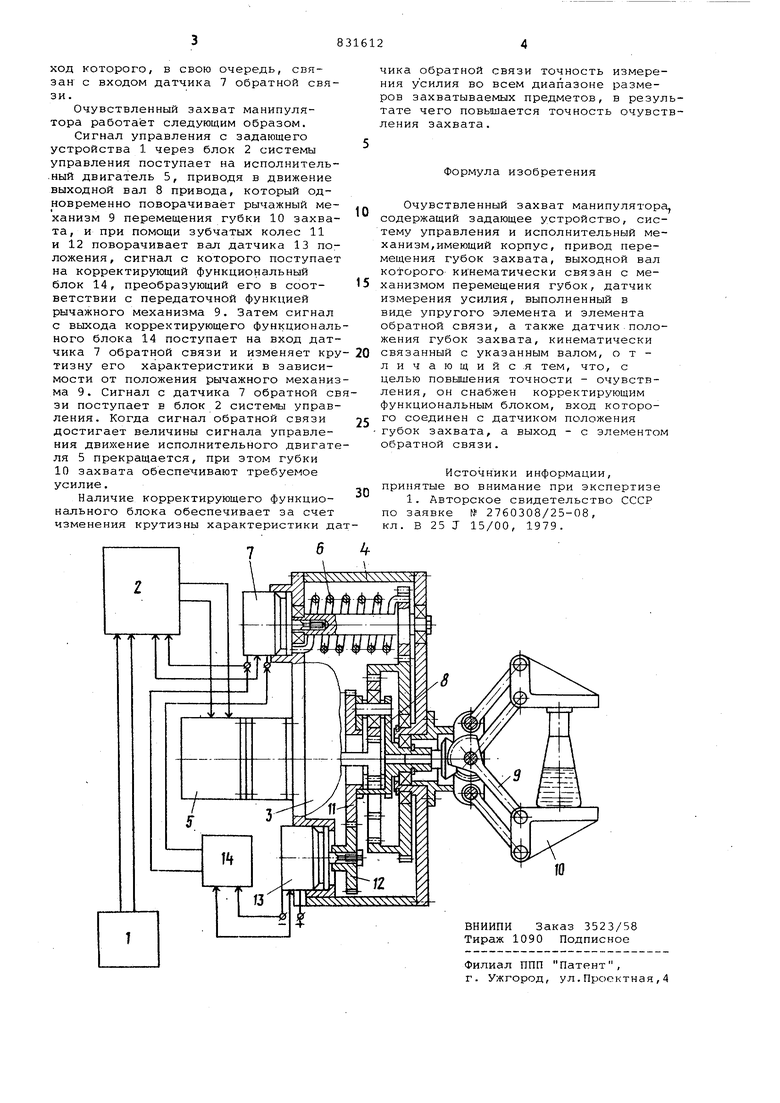
На чертеже изображен очувствленный захват манипулятора.
Захват содержит задающее устройство 1, электрически связанное
5 через блок 2 системы управления с исполнительным механизмом 3, в корпусе 4 которого смонтированы привод перемещения губок захвата, включающий в себя исполнительный двигатель 5, и датчик измерения усилия, содержащий упругий элемент, например пружину 6, и датчик 7 обратной связи. Выходной вал 8 привода связан с рычажным механизмом 9, соединенным с губками 10 захвата, и кинематически связан при помощи зубчатых колес 11 и 12 с датчиком 13 положения губок захвата, выходом связанного с входом корректирую0 шего функционального блока 14, вы
