Изобретение относится к роботизированной технологической оснасТке, применяемой в производстве гальванопокрытий, а также в быстро переналаживаемых системах механообработки или сборки и является усовершенство ванием изобретения по авт. св. № 770790.
Цель изобретения заключается в расширении технологических возможностей.
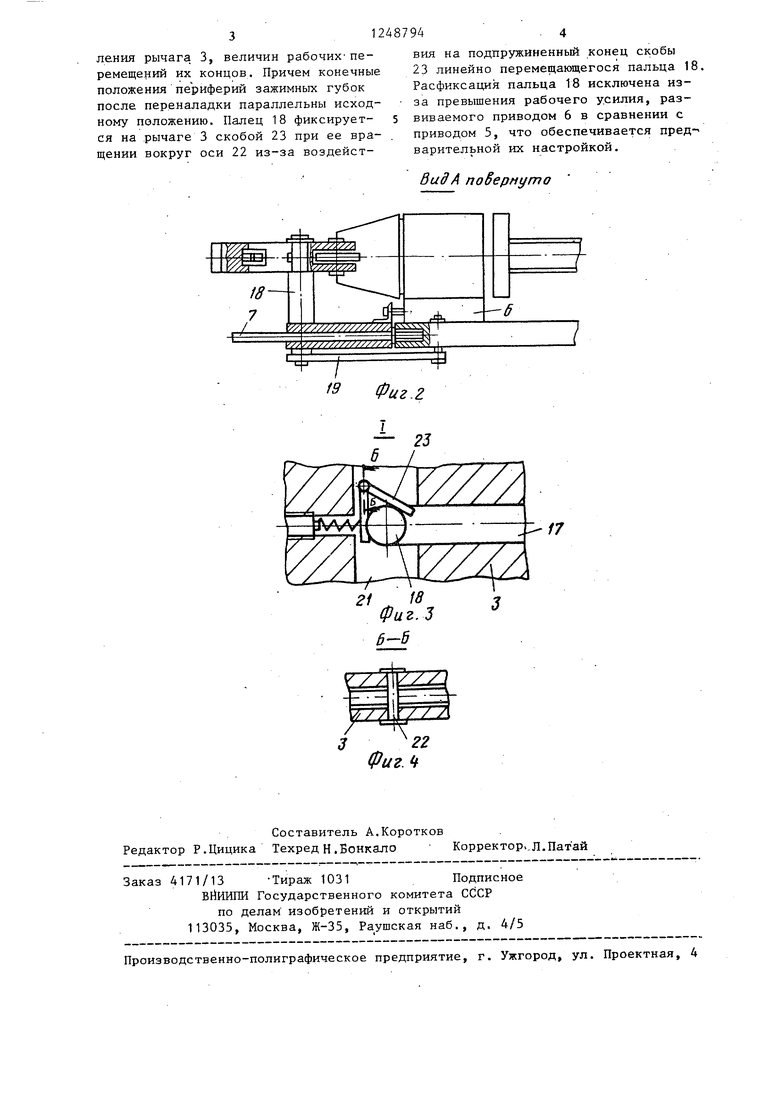
На фиг. 1 показана захватная головка, общий вид; на фиг. 2 - вид А на фиг. 1j на фиг. 3 - узел I на фиг. на фиг. 4 - разрез Б-Б на фиг.3.
Захватная головка состоит из корпуса, 1, захвата, выполненного в виде двух шарнирно установленных на подвижной платформе 2 подпружиненных рычагов 3 с роликами 4, привода 5 захвата, закрепленного на корпусе 1, привода 6, который также закреплен на корпусе 1, линейного перемещения платформы 2 вдоль направляющих 7, жестко закрепленных в корпусе 1, и вибратора, выполненного в виде электромагнита 8, ярма 9 и упругого тела 10. Б ярме 9 установлены регулировочньй винт 11, стопорный винт 12 и прокладка 13. Упругое, тело 10 выполнено в виде плоских пружин, в количестве не менее двух, установленных под углом к направлению силы электромагнита 8. Сердечник 14 гэлектромагнита 8 неподвижно соединен с основанием 15. Основание 15 неподвижно соединено с конечным звеном манипулятора 16. Один конец уп- ругого тела 10 закреплен на ярме 9, а .другой на основании 15 электромагнита 8. В рычагах 3 выполнены прдольные, пазы 17 для пальдев 18, выполняющих роль опор рычагов 3, и связанных через тягу 19 с корпусом с возможностью углового и линейного перемещения относительно него.
В подвижной платформе 2 при этом выполнен криволинейный, по дуге окружности паз 20, через который пропущен палец 18. С обоих торцов рычагов 3 выполнены также пазы 21, в которых посредством осей 22 закреплен подпружиненные вдоль оси пазов 17 скобы 23. Последние выполнены с ост )ым углом при вершине и с возможностью взаимодействия с пальцем 18 для его однозначной фиксации в па
зу 17. Захватная головка манипулирует с изделием 24.
Захватная головка работает следующим-образом.
В исходном положении приводы 5, 6 и электромагнит 8 отключены. Подпружиненные рычаги 3 разведены, торцовые поверхности ярма 9 и сердечника 14 под действием упругого тела 10
образуют зазор между собой. Между регулировочным винтом 11 и сердечником 14 также имеется зазор. Первоначально включают привод 5, при этом рычаги 3 поворачиваются- относительно
пальцев ,18 и захватывают изделие 24. Далее включается электромагнит 8, питаемый пульсирующим напряжением. За время срабатывания электромагнита 8 ярмо 9, соединенное в одно целое
с корпусом 1, притягивается к сердечнику 14, сжимая упругое тело 10. За время отпускания электромагнита 8 ярмо 9 возвращается в исходное положение под действием упругого тела 10. Таким образом, изделие 24. совершает колебания. Амплитуда колебаний регулируется винтом 11. Упругое тело 10 установленное под углом к оси электромагнита, обеспечивает поступательно-вращательное колебание.
После отключения напряжения вибрации прекращаются. По окончании тех- нрлогического процесса отключается привод 5, рычаги 3 освобождают изделие 24. Цикл повторяется автоматически требуемое число раз.
При смене типоразмера изделия включается привод 6, связанный с подвижIной платформой 2, которая линейно перемещается вдоль направляющих 7, закреп л енных в корпусе 1, и заставляет перемещаться пальцы 18 вдоль продольных пазов 17 в рычага:х 3.
При этом палец 18 вращает скобу 23 вокруг оси 22, причем скоба 23 размещается посредством своей пружины в пазу 21 таким образом, что ее свободный конец не выступает в продольном пазу 17 рычага 3. Палец 18 самоустанавливается в пазу 20 платформы 2 из-за вращения тяги 19 и ее линейного смещения совместно с пальцем 18 относительно оси, связывающей тягу 19 с корпусом 1. Смена расположения оси пальца 18 относительно продольного паза 17 рычага 3 приводит к изменению коэффициента усиления рычага 3, величин рабочих- перемещений их концов. Причем конечные положения периферий зажимных губок после переналадки параллельны исходному положению. Палец 18 фиксируется на рычаге 3 скобой 23 при ее вращении вокруг оси 22 из-за воздействия на подпружиненный конец скобы 23 линейно перемещающегося пальца 18. Расфиксация пальца 18 исключена из- за превышения рабочего усилия, развиваемого приводом 6 в сравнении с приводом 5, что обеспечивается пред-- варительной их настройкой.
Вид А подернуто
19 фиг.г
У// //
W7
7
3 22
Фиг. Ч
Составитель А.Коротков Редактор Р.Цицика Техред Н .Бонкало Корректор,,л.Пат ай
Заказ 4171/13 Тираж 1031Подписное
ВЙИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4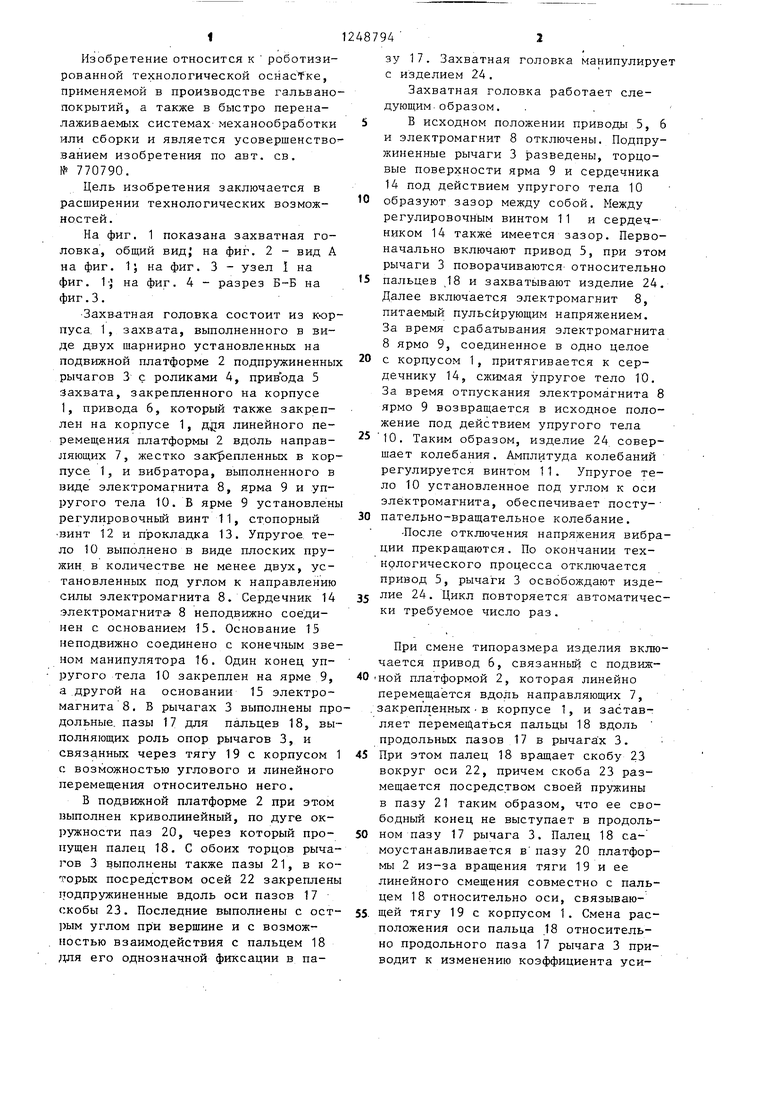
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1979 |
|
SU770790A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Накопитель на гибком магнитном диске | 1988 |
|
SU1578760A1 |
| Автомат для подготовки электрических проводов к монтажу | 1986 |
|
SU1464232A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Привод стрелочного перевода | 1982 |
|
SU1044526A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЗАМКОМ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2054110C1 |
| ПРИВОД ЗАМКА ПОДВИЖНОГО ЭЛЕМЕНТА КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2198799C2 |
| ШВЕЙНАЯ МАШИНА «ЗИГ-ЗАГ» ДЛЯ ДВУХНИТОЧНОГО ЦЕПНОГО СТЕЖКА | 1968 |
|
SU231445A1 |

| Устройство для подачи штучныхзАгОТОВОК | 1979 |
|
SU837503A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
