(54) ЗАХВАТНАЯ ГОЛОВКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1984 |
|
SU1248794A2 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Манипулятор модульного типа | 1983 |
|
SU1093538A1 |
| Захват манипулятора | 1986 |
|
SU1414634A1 |
| Манипулятор | 1988 |
|
SU1537510A1 |
| Захватное устройство для изделий со штырем с фигурным концом | 1989 |
|
SU1659346A1 |
1
Изобретение относится к конструкциям захватных головок манипуляторов, в частности к конструкциям захватных головок, применяемых в автоматических линиях нанесения по- 5 крыткП окунанием.
Известен исполнительный орган манипулятора, механическая рука которого состоит из звеньев, содержащий корпус с установленными в нем 10 захватными рычагами и их приводом и вибратор 1.
В известном устройстве вибратор кинематически связан с приводом поворота захвата, что позволяет 15 встряхивать обрабатываемое изделие лишь при повороте корпуса с захватом, удерживающем изделие. Кроме того, конструктивное выполнение вибратора не позволяет регулировать 20 амплитуду колебаний обрабатываемого изделия.
Целью изобретения является расширение технологических возможностей захватной головки манипулятора. 25
Для достижения поставленкой цели вибратор снабжен основанием, установленном на конечном звене манипулятора, ярмом с регулировочтам .винтом, расположенным в корпусе.
и упругим телом, соединяющим ярмо с основанием, а упругое тело выполнено в виде плоских пружин, в количестве не менее двух, установленных под углом к направлению действия сил электромагнитного устройства.
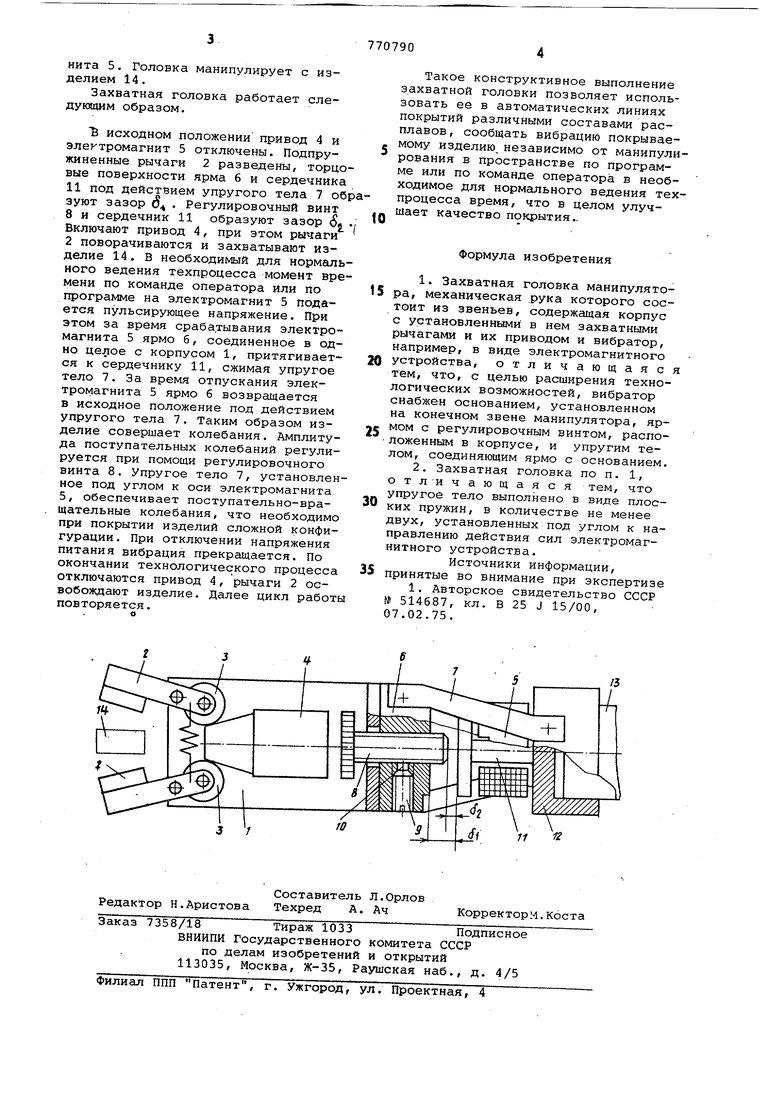
На чертеже показан общий вид захватной головки.
Захватная головка состоит из корпуса 1, захвата, например, в виде двух шарнирно установленных на корпусе 1 подпружиненных рычагов 2 с роликс1ми 3, привода 4 захвата, закрепленного на корпусе 1, и вибратора, выполненного в виде электромагнита 5, ярма 6 и упругого тела 7. В ярме б установлены регулировочный винт 8, стопорный винт 9 и проклгщка 10. Упругое тело 7 выполнено в виде плоских пружин в количестве не менее двух, установленных под углом к направлению действия силы электромагнита 5. Сердечник 11 электромагнита 5 неподвижно соединен с основанием 12. Основание 12 неподвижно соединено с конечным звеном манипулятора 13. Один конец упругого тела 7 закреплен на ярме 6, другой конец - на основании 12 электромаг
