HsoOiieTCHne с тносигся 1ч H.TiiecoiiUKi Г апьианическиу покрытий, ;чимичсско11 обработки ипделий, выполппсг мх на иолвесках, корзинах или барабанах на аитостпергторнмх линипх .
Цель и:1обрстен я - гкми.г.пенис про- и;11и дитс;1Ы Ости путем моханипании загрузки я ньп рузки.
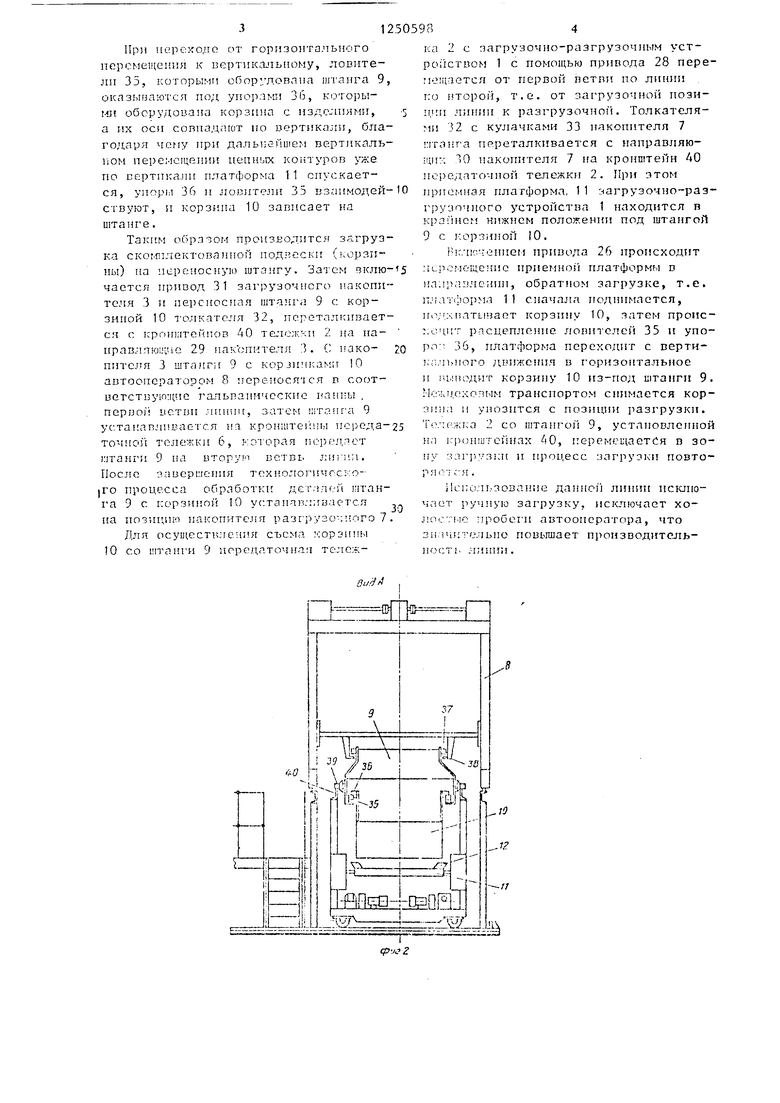
На фиг. 1 изображена алтонатичес- кая линия г, плане; на ijini . 2 - нид Л па фиг. 1; на фиг. J - ппд Б на (1:.иг. 1; на фиг. А - разрез Е-В па фиг. З; на фиг. 5 - пид па фиг. 1.
Л тоопера горная лишьч jva. i гальва- пическо обработш изделий содержит загрузочпо-разгрузочное устройство 1 устано1:лоиноо на переда точно; тележ-- ке 2 на позшдп загрузк1г или разгрузки, загрузочно-наконительпое уст- ройстно 3, rynuiJiiinhie уст.. 1НС)П1 ;и А.
5 химлчссг:о 1 и г альианическо об х Тбо гки, псрсматочную тслсжь .у 6, pacnoJio;-KfjHnyk) т зоне Hepeii,ii4H штанг с O;MIO;I истпи линии на другч ю, раз- грузочщ1-накопи ге.г:ьп(К: устройство 7, траяспортпос сре дство 8, выполненное п и;;с ; л;тосператог а, нгга п у 9 дл.ч креплонич на iiei i KOiisruiLi 10 с обраба i4;i;jae. и:1Лелиями. Ус:тро11С ; ;и I представляет coOoit npiieruioe устройст I5C1, п. п ииде пдат1Ьс;рмы I I с лошп елями 12. (;)орма 11 шарни|5 :;о :1ак1)еплепа при помо:;;и иадык; 13 и 1) ; с;лду пal., лсчп,:ми и иравыми, см(;г.им1 1ь:ми отпосите;:1.но д,ру друга и гог изоптально: Н-|; ;скости i;,en ni,i..iii пpиLoдllымIl ;оптурами 15 и 16 с системе HjesAoneic. lljjn отом -:оп 1 ур 15 пмеет . те:- у звездочек 17-20, а коптур () - 7.1-24. Звсздоч:а 20 и 2 попарно сидят iia валу 25, получающем iipaiifciine от тфигода 26. Вы- поднение цепных контуров 15 п 16 в вг.де дпу;-: пар, левь1ч и правых, смещенными относительно друг друга л горизонтально 1лоскости, служит Д.ЧЛ обеспечения последовательного не;1сме1иеиия прие.много устро;(стпа. 1 1 в 1 оризонта,ч11НО11 и вертикальной 1лоскост;1, достигаемого за счет того, что 20 и 21 каждой пары контуров расположены па некото- рог- расстояшп друг от ;;руга.
Тележка 2 имеет возможность пе- рег;о1цат1 ся г-гел--ду загрузоч)1О11 и роз- грузс;чиоГ1 позициями по рельсовому пути 27 паправлени, перпендику5
0
|5 20
25 30 -j о
5
0
5
лирном оси автооператор1 01 ; „линии за счет привода 28.
11г1ко1П1те,пи 3 и 7 аналогичную между копструкщно и пред- стапляют собоГг по д,пс пари иаправляю- цих 29 п 30 cooTueTCTueiMio, по которым перемещаются nocpe;i.cTp.ovi реечно перед,ачи и пригюда, 31 толкателя 32 с и арпирно закре 1:1енль ми на последних с опредсденн,м nj.iroM 1. улачкаг-;и 33.
Шгапгп 9 1.Ы11олпе ;ь и вид,е балки с укрытием ЗА для 1 рекрг тпя зеркала панн в 1- омепт, когд.а JTaHra 9 опущена п ванну и отк11ыта ее кр1;глка для пг)ог, ч ехпологпчсского процесса. 9 c4ia6jKe ia лоипгслями 35 д.ля 3.пи1 оде;1стп; я с i рузгм:есуг ; м элементом 36 ) 1 Ci, унорам п д,;1я (,е -1С 1 с. зах};а 1 Т И 38 аитооператг ра 3 с упорами 39 для (;4jecne4e inH r ai ;o ie) с i-cponuiTefi- чО перо.датолн:. TC. 2 с па- 11рапл по ;пм : 29 I 30 па:ил. птелс1 3 п 7 1 с кулачками 33 ivijnraтело; 32.
Работа осуи ес П Ляетс.я следующим образом.
При jarpyrj.io лпнпи г срс:п; С па;-: lUTai ra 9 ус: Гн но;;, гспл па i pv :; гейне АО ;оред,;1то-п :)| ( те.лгжк п 2, |);ГЛГ Лпе - Hot- ii ппде :аправля1; П1пх . 1)И1СУП1ая п; а1форма 1 1 :i;irpy зоч О-р-: Грузочпо- го yt;Tpo icTi3a. I нахо;:,гг;:-i в , ;,1 нутом .onnn (на . 3 пупКТИрПОО (i 3riOpn ;r; in е) . КорЛ1НГ1 10 ме: 1;ц(г-:о1 Ь М тра.С;1ортпм:т средством (па 110 :азапо) .ипилп1 аотся па njHieMiiyw нлатф; рму 1 1 перед, гележки и ориентируется лсипгтеля- МТ1 12.
платформа 1 1 закреплена ПсЛ1,1,ам 13 па ь;о1Г1Л ре 15, а палы,ами 1А - па цепном контуре 16. )5кл ичается привод 26 псрс - ещения прпе Н1;:ч плат рормь. При ix a::iennn приводного вала 25, еп11ые 15 I 16 через пск .редстг- нрпводпых звезд.олек 20 п 21 пе1)еме 1:;;отся в од- ПОГ- nanjiaijjiennn п с o n HaKOiioii ско- Г остыо. llpиe нlaя HJ aтфop ; 1 1 пере- мецаетс.я в горизоптальи(1й п.лоскости до i-ex пор, пока уз.1П)| крепления платформы с К нтурами, т.е. 1альцы 13 п 1А, не достпгпут откло- пяюл .их звездочек 19 п 23. Ирч дальнейшем )е1це,1пи 1. i;o tTy; of, уз.иы кр.епленпя счлуСчпот (гпсчоняюшие. знездочкч ) приемма.я н.чатфсрма, оставаясь I) горизонтальном пол1 жеп1П, 11 с. р е м е да о т с я в t т п }ч а л о .
При переходе от горизонтального пг.рсме1 ;епия к пертика-аьпому, ловители 35, которыми оборуловпиа ujTaiira 9, оказываются иод упо11Лми 36, которы- ГХЦ обсрудоваиа корзина с издс и1ями, а их оси совиадают но вертикали, благодаря чему при далы;ейи1ем вертикальном иере;-1С1цении цепных контуров уже по Еерти1:али платформа 1 1 спускает20
36 и ловитеои 35 взаимодей-tO нрпемная платформа, 11 иагрузочио раэгрузпчного устройства 1 находится в Kpai iHcr нижнем положении под штангоЛ 9 с корзиной 10.
Н :л1о-.;еппем привода 26 происходит :1С тсмещение приемно платформы в налрр.влсиии, обратном загрузке, т.е. )О1)мл 11 сначала поднимается, по;г-;пать1вапт корзину 10, затем проис- ::сч,ит расцепление ловителей 35 и упо- ро: 35, платформа переходит с перти- к альиого ДБИже Н1л в горизонтальное и выводит корзину 10 из-под штанги 9. Мемхи.ехопым транспортом снимается корзина | увозится с позиции разгрузки. То. ю.жка 2 со штанго 9, уста11овле1И1ой на 1:ропштсйнак «(О, перемещается D зону заг 5 /з1;и и процесс загрузки повтори (-;,: я .
Использование данноГ линии исктпо- чает ручную загрузку, исключает хо- jiocTi-ie пробеги автооператора, что зиачите.чыю повышает производительность ЛИН1П1.
ея, упоры
ствуют, и корзр.па 10 зависает на
штанге.
Таким образом производится загрузка скомплектованпой подвеск и (,орзи- ны) па перг носную штангу. Затем вклю- 5 чается привод 31 загрузочного накопителя 3 и перспоспая штазгга 9 с корзиной 10 толкателя 32, переталкивается с кроп1;1теЙ1К)в 40 тело.т.ки 2 па па- npaBJL TKjiJiuG 29 пак опителя 3. (; накопителя 3 шталги 9 с корзинками 10 автооператором 8 переносятся в соот- ветствую:цие гальпапические ванны . первой ветви линии, затем щтанг а 9 устанавливается на крони1те1 ; лы переда-25 то ию тслежк 6, 1 :оторая пс рсдпот штанг и 9 на вторую ветвь литиа. После завершения технологичг:С;-:о- |Го процесса обработки дсгалсй итан- га 9 с корзиноГ; 10 устанавливается иа иозицИ О накопителя разг)узо ;ного 7 .
Для осуществ-пеиик съема jcopaHiif i 10 со штанг 9 передаточная те:те:т;30
5934
ica 2 с загрузочно-разгрузочиым устройством 1 с помощью привода 28 пере- мо цается от первой петви по линии i;o второй, т.е. от загрузочной пози- пии ли11ии к разгрузочно. Толкателями 32 с кулачками 33 иакопителл 7 ггганга переталкивается с напрапляю- Пли:-. 30 накопителя 7 на кронштейн АО передаточной тележки 2. При этом
20
5 25
- 525.
30
VK /Гх VN
ч
ЛЛ /
iBi
-w
Г
7в
L
Г
VL
ГС
; /
.-j.
lO
гз
/
.mi-r:.
,
i
. 4
5-е
. / Г . /,/
I, / II-II / т /
. 4
.
Г5 го
S-V5 5
J.М 5 ---/-- fr
.g ----i--c ti
.J
| У
П-Jl
«L
(puf.4Ipuf S
г7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная окрасочная линия | 1989 |
|
SU1666212A1 |
| Линия для химической обработки деталей | 1984 |
|
SU1225883A2 |
| Автоматическая линия для химической и гальванической обработки изделий | 1975 |
|
SU601212A1 |
| Индукционная печь для спекания изделий из металлических порошков | 1976 |
|
SU553046A1 |
| Линия для гальванической и химической обработки изделий | 1987 |
|
SU1446199A1 |
| Автоматическая линия для металлизации плоских деталей | 1987 |
|
SU1507883A1 |
| Автооператорная гальваническая линия | 1987 |
|
SU1423633A2 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Линия для термической обработки | 1985 |
|
SU1416519A1 |


39
(SI
Составитель В. Комраков Редактор Л. Авраменко Техред О.ГортвайКоррскторМ. Ыаксимишинец
- - - - - - - - - - - - - - - - - - ---- -- - - -... - -
Зат-аз 4379/22Тираж 615Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
г 5
| Лпто.с,сос ссидетольство СССР К 603712, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
