Изобретение относится к устройствам для балансиртюй подвески механизированного инструмента при сле- сарно-сборочных и монтажных работах, а также может быть использовано как грузоподъемное устройство.
Цель изобретения - расширения технологических возможностей за счет выполнения дополнительной операции по переносу равновесовых изделий без дополнительной наладки.
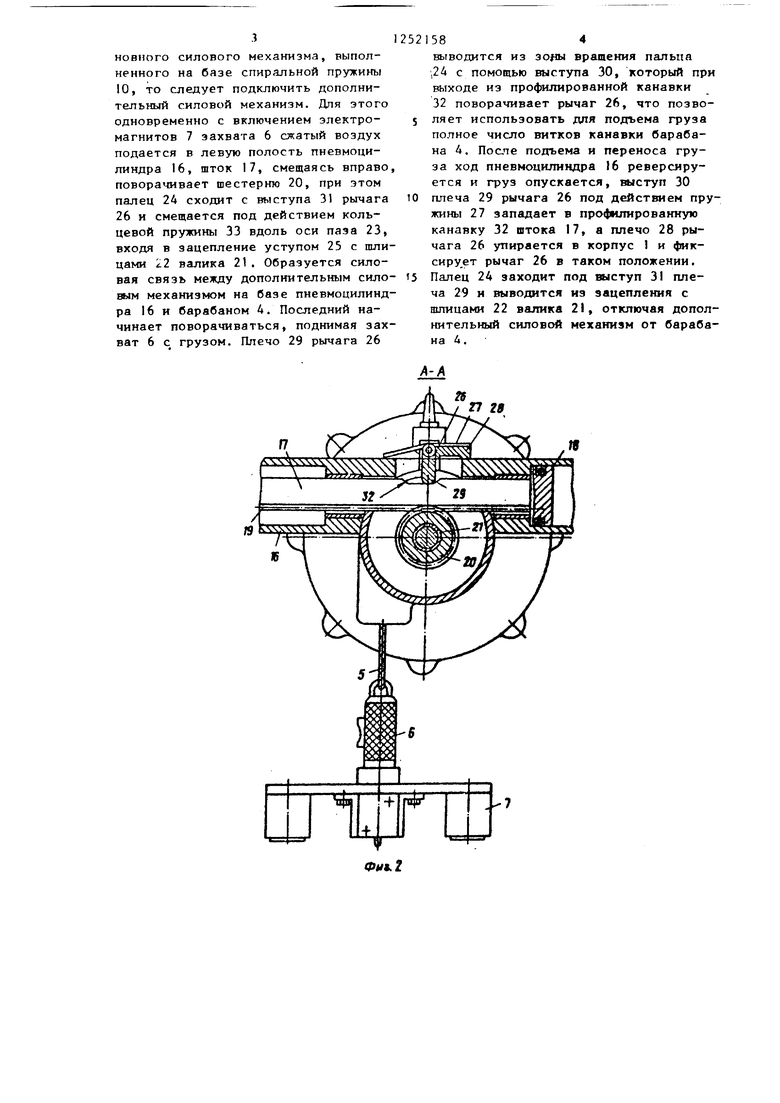
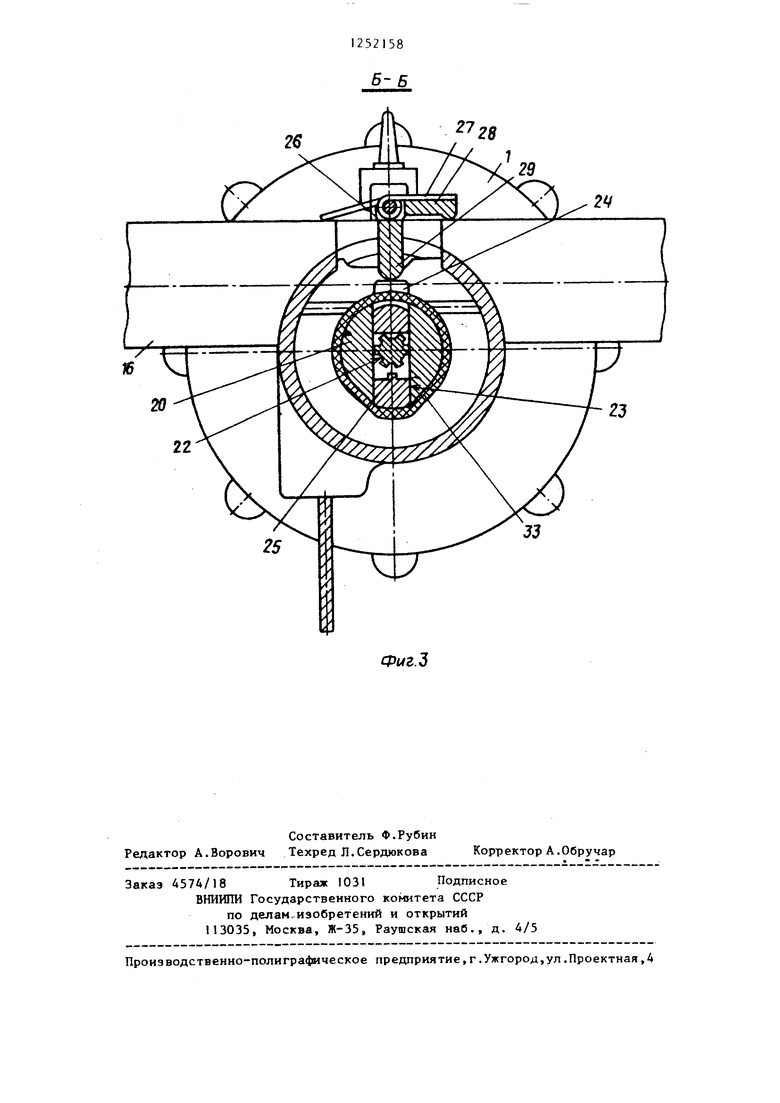
На фиг.1 изображено устройство для подъема и опускания груза, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1.
Устройство для подъема и опускания груза содержит корпус 1, жестко связан}1ую с ним ось 2, установленный на ней посредством подшипников 3 барабан А с намотанным на нем тросом 5, на свободном конде которого закреплен cMeHt&m захват 6, например электромагнитный, имеющий электромагниты 7 (фиг.2), самотор- мозящую червячную передачу, вклю- чающую червяк 8 и шестерню 9, установленную на оси 2.
Основной силовой механизм пред- ставляет собой спиральную пружину 10, размещенную в барабане 4 и скреп ленную с одним концом, а другим с шестерней 9.
Стопорный механизм выполнен в виде двух коаксиапьно установленных втулок II и 12, шарика 13, располо- женнсго в продольного пазу Н втулки 12 и в винтовой канавке 15 втулки 11, жестко соединенной с осью 2 . Для подъема разновесных грузов без переналадки устройства служит допол- нительный силовой механизм, выполненный в виде пневмоцилиндра 16 с штоком 17, имеющим на концах поршни 18, зубчато-реечной передачи, состоящей из рейки 9, нарезанной на што- ке 17, и шестерни 20, свободно посаженной на консольный валик 21, расположенный на торце барабана 4 по его оси. На свободном конце валика 21 выполнены шлицы 22, а ступица шестерни 20 имеет сквозной поперечный паз 23.
Для подключения дополнительного силового механизма к барабану 4 служит переключатель, представляющий собой палец 24 с шлицевым уступом 25, ycтaнoвлeF ный в пазу 23 шестерни 20 с возможностью периодического
58I
взаимодействия уступа 2.5 с впадина- -o пглицсв 22 валика 21, и двупле- гий рычаг 26, шарнирно установленный с корпусе 1 и подпрчгжиненный относительно него с помощью пружины 27.
Двуплечий рычаг- 26 имеет одно плечо 28, которое контактирует с корпусом 1, фиксируя тем самым положение рычага 26, и второе фигурное плечо 29, которое два выступа 30 и 31, первый из них расположен в профилированной канавке 32, выполненной на штоке 17, осуществляя кинематическую связь рычага 26 со штоком 17, а второй контактирует с торцом пальца 24. Последний в свобод ном состоянии своим уступом 25 к впадинлм пшицев 22 валика 21 кольцевой гтружиной 33, жестко соединяя при этом шестерню 20 с барабаном 4. При контакте пальца 24 с выступом 31 рычага 26 уступ 25 не взаимодействует со шлицами 22 консольного валика 21 и шестерня 20 в этом спучае свободно посажена на валике 21, т.е. силовая связь между шестерней 20 и барабаном 4 разомкнута.
Устройство для подъема и опускания груза работает следутошим образом .
На свободный конец троса 5 подвешивают необхо тимый захват 6, например электромагнитный. Настройку устройства на бaлaнcиp ryю подвеску собственно захвата 6, т.е. только на вес последнего или же на вес захвата 6 с грузом (не показан), в рамках расчетного дпя спиральной пружины 10, производят вращением червяка 8, при этом поворачивается шестерня 9, закручивая спиральную пружину 10, настраивая ее на рабочий момент. Шарик 13 стопорного механизма находится в крайнем правом положе 1ШИ в винтовой канавке 15, а захват 6 - в крайнем верхнем положении. При опускании захвата 6 (захвата с грузом) спиральная пружина 10 закручивается, сохраняя статическое равновесие. Шарик 13 при этом перемешается влево и при крайнем нижнем положении захвата 6 находится в крайнем левом положении, обеспечивая запас хода троса 5 на полоборота барабана 4, предохраняя его от перегибов .
Если необходимо поднять груз, вес которого превышает расчетный для ос3
новиого силового механизма, выполненного на базе спиральной пружины 10, то следует подключить дополнительный силовой механизм. Для этого одновременно с включением электро- магнитов 7 захвата 6 сжатый воздух подается в левую полость пневмоци- линдра 16, шток 17, смещаясь вправо поворачивает шестерню 20, при этом палец 24 сходит с выступа 31 рычага 26 и смещается под действием кольцевой пружины 33 вдоль оси паза 23, входя в зацепление уступом 25 с шлицами 22 валика 21. Образуется силовая связь между дополнительным сило- вым механизмом на базе пневмоцилинд- ра 16 и барабаном 4. Последний начинает поворачиваться, поднимая захват 6 с грузом. Плечо 29 рычага 26
1584
выводится из зо|ля вращения пальца ,24 с помощью выступа 30, который при выходе из профилированной канавки 32 поворачивает рычаг 26, что позволяет использовать для подъема груза полное число витков канавки барабана 4. После подъема и переноса груза ход пневмоцилиндра 16 реверсируется и груз опускается, выступ 30 плеча 29 рычага 26 под действием пружины 27 западает в npo4 umpoванную канавку 32 штока 17, а плечо 28 рычага 26 упирается в корпус 1 и фик- сиру,ет рычаг 26 в таком положении. Палец 24 заходит под выступ 31 плеча 29 и выводится из зацепления с шлицами 22 валика 21, отключая дополнительный силовой механизм от барабана 4 .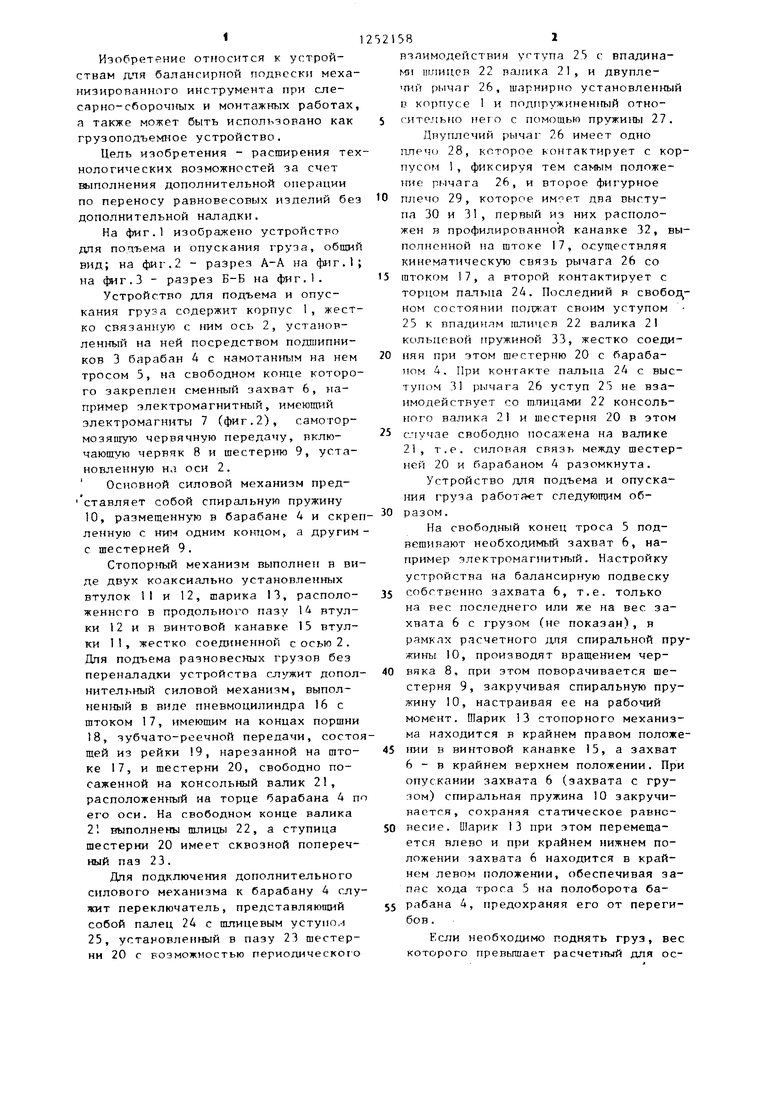
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема и опускания груза | 1975 |
|
SU543797A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Устройство для вырубки заготовок из плоского материала | 1985 |
|
SU1238846A1 |
| Замок для стропа | 1979 |
|
SU816927A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ КРУГЛОВЯЗАЛЬНОЙ МАШИНЫ | 1973 |
|
SU390216A1 |
| ПРИСПОСОБЛЕНИЕ К АВТОМАТИЧЕСКИМ ТОКАРНЫМ СТАНКАМ ДЛЯ ПОДАЧИ МАТЕРИАЛА | 1931 |
|
SU38565A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| БАХРОМО-ВЯЗАЛЬНАЯ МАШИНА | 1936 |
|
SU55198A1 |

2S
28
26
27
28
33
Составитель Ф.Рубин Редактор А.Ворович Техред Л.Сердюкова
Заказ 4574/18 Тираж 1031 Подписное ВНИИПИ Государственного комитета СССР
по делам.изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Фиг.З
Корректор А.Обручар
| Устройство для подъема и опускания груза | 1975 |
|
SU543797A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
