(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПРОМЫШЛЕННОГО
1
Изобретение относится к области машиностроения, а именно к промышленным роботам и манипуляторам.
Известен исполнительный орган промышленного робота, содержащий модули степени его подвижности, заключенные в корпусе 1.
Недостатком такого исполнительного органа является то, что он не обладает высокими возможностями в изменении кинематической схемы работы.
Наиболее близким решением к изобретению является исполнительный орган, в которо.м корпусы связаны между собой резьбовым соединением 2.
Недостаток этого исполнительного органа заключается в том, что процесс соединения корпусов является довольно сложным.
Целью изобретения является повышение эксплуатационных качеств путем упрощения процесса соединения модулей.
Для этого корпус каждого модуля снабжен конусными выемками, на которых совмещены с осями отверстий резьбового соединения и вкладышами, выполненными в виде втулок с ответными конусами на концах, установленными на средней части элемента
РОБОТА
резьбового соединения с возможностью осевого перемещения и передачи крутящего момента на этот элемент.
На фиг. 1 изображен модуль одной из степеней подвижности (качательной, вращательной), разрез; на фиг. 2 - исполнительный орган промышленного робота, общий вид; на фиг., 3 - узел I на фиг. 2; на фиг. 4 - схема соединения модулей; на фиг. 5 - то же, вариант соединения модулей.
10Приводной модуль, который может быть
использован в качестве вращательной или качательной степени подвижности, состоит из неподвижного опорного корпуса Г и подвижного выходного корпуса 2, расположенных соосно. В неподвижном корпусе размещен электродвигатель 3, на валу которого установлена шестерня 4. Эта шестерня является входом планетарного редуктора 5, выход которого через зубчатые колеса 6 и 7 связан с зубчатым колесом 8, жестко ус20 тановленным в подвижном корпусе 2. В центре неподвижного корпуса 1 закреплен измерительный преобразователь 9 (датчик), вал которого связан с подвижным корпусом 2. Корпусы 1 и 2 представляют собой кубы.
грани которых выполняют функции привалочных поверхностей для соединения модулей друг с другом и с соединительными звеньями. На привалочных поверхностях (одной или нескольких) каждого модуля имеются резьбовые отверстия, расположенные, например, в вершинах квадрата. Резьбовые отверстия одного корпуса имеют резьбу одного направления, например левую, а резьбовые отверстия другого корпуса имеют резьбу другого направления, например правую. Модуль 10 поступательной степени подвижности имеет устройства того же назначения, что и во вращательном модуле. Неподвижный корпус 11 и подвижный корпус 12 на торцах и боковых гранях имеют прИ валочные поверхности, оснащенные резьбовыми крепежными отверстиями для соединения с другими степенями подвижности и с соединительными элементами (звеньями) 13, которые предназначены для соединения модулей степеней подвижности в конкретную кинематическую схему робота с определенной рабочей зоной. Эти звенья имеют по крайней мере две привалочные поверхности, на которых в вершинах квадратов размещены резьбовые отверстия, причем резьбовые отверстия одной поверхности имеют резьбу одного направления, а резьбовые отверстия другой поверхности - резьбу другого направления. Соединительные звенья могут быть различного назначения, а следовательно и исполнения: 13 - для соединения однотипных модулей разнесенных в пространстве; 14 - для соединения модулей разных типоразмеров и т. д.
Все резьбовые отверстия на привалочных поверхностях модулей и соединительных звеньев имеют конусные выемки 15. Крепежные элементы предназначены для крепления составных частей робота друг к другу. Они выполнены в виде щпильки 16, на концах которой нарезана резьба разного направления. В средней части установлена многогранная втулка 17, которая, например, при помощи щпонки 18 зафиксирована во вращательном направлении и имеет возможность поступательного перемещения по шпильке в продольном направлении. Торцовые поверхности втулки 17 имеют конические поверхности, угол наклона которых равен углу наклона конусных выемок резьбовых отверстий привалочных поверхностей корпусов.
На фиг. 1 показан один из вариантов исполнительного органа робота, имеющего пять степеней подвижности (одна поступательная плюс две качательные плюс две вращательные)., Приводные модули соединены друг с другом либо непосредственно, либо через соединительные звенья. Плавание втулки 17 позволяет при соединении
модулей произвести разгрузку щпилек от изгибающих нагрузок за счет перевода этих нагрузок в напряжения - растяжения шпилек.
Исполнительный орган работает следующим образом.
После того, как изучен технологический процесс, в котором предусмотрено использование робота, составляется кинематическая схема и определяются параметры составных частей исполнительного органа, выбираемые
из существующих типоразмерных рядов модулей. Сборкой приводных модулей, соединительных звеньев при помощи крепежных элементов и подключения унифицированной системы управления заканчивается подготовительная работа. При функционировании
робота в технологичесом процессе электродвигатели приводных модулей, управляемые системой управления через редукторы приводят во вращение (поступательное перемещение) выходные корпусы модулей. Система управления роботом, используя информацию от измерительных преобразователей, осуществляет функционирование робота по выбранной программе.
Предлагаемое исполнение составных частей исполнительных устройств роботов позволит повысить уровень унификации роботов, упорядочить типоразмерный ряд модулей, упростить процесс сборки робота с конкретной кинематической схемой, производить сборку роботов типа рука и облегчить решение проблем организации производств с применением робота силами потребителя.
Формула изобретения
5 Исполнительный орган промышленного робота, содержащий модули степеней его подвижности, заключенные в корпусы, связанные между собой резьбовым соединением, отличающийся тем, что, с целью повышения эксплуатационных качеств путем упрощения процесса соединения модулей, корпус каждого модуля снабжен конусными выемками, оси которых совмещены с осями отверстий резьбового соединения, и вкладышами, выполненными в виде втулок с ответными конусами на концах, установленными на средней части элемента резьбового соединения с возможностью осевого перемещения и передачи крутящего момента на этот элемент.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 525541, кл. В 25 J 9/00, 1975.
2.Авторское свидетельство СССР 428934, кл. В 25 J 15/02, 1972.
J3
I.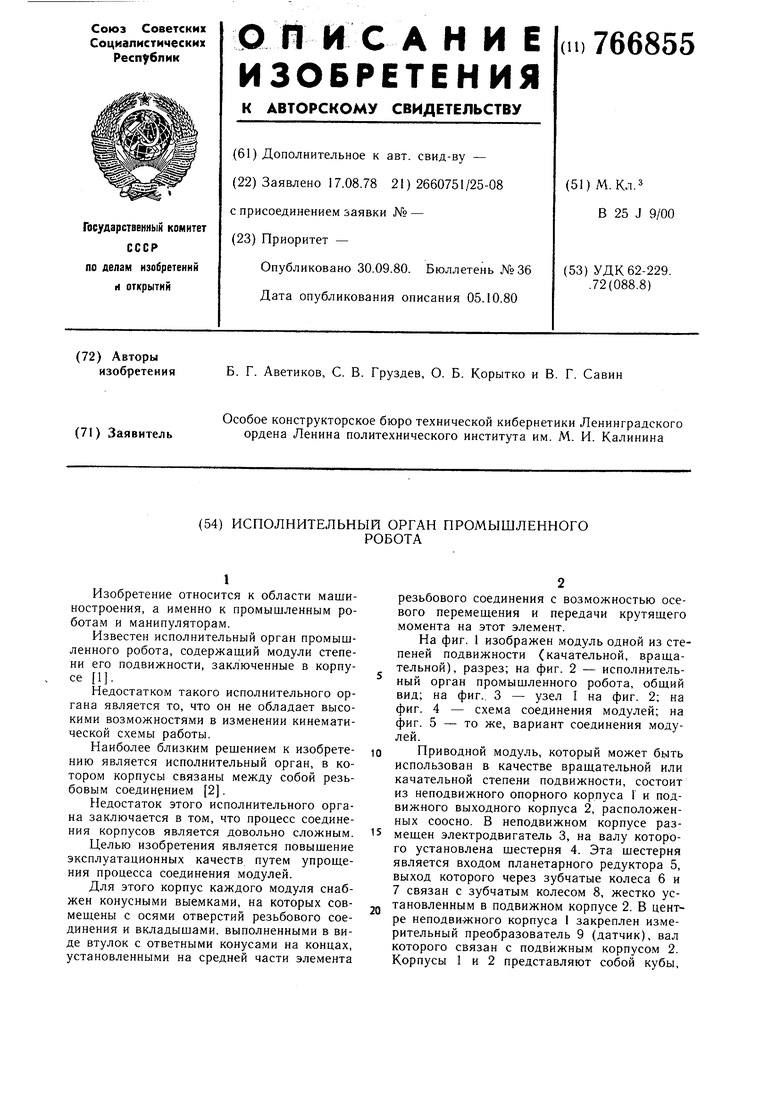
| название | год | авторы | номер документа |
|---|---|---|---|
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Кассета для размещения деталей | 1988 |
|
SU1588647A1 |
| Устройство для прямолинейного перемещения исполнительного органа | 1988 |
|
SU1714258A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| ПЕРЕДВИЖНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ НИЖНИХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2325291C1 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |

Cpuz.3
Jf
(Риг. 5
(риг. f
