1
Изобретение относится к MatoHHo- строению, а именно к манипуляторам, и может быть использовано при выполнении погрузочно- разгрузо -шых, подъемно-транспортных и других тех- нологических onepaijjift с длинномерными прелметами в различных производствах.
Целью изобретения является повышение надежности работы путем устра- нения возможности самопроизвольного вьтадеиия захваченных предметов.
На фиг,1 изображена схема захват предмета; на - схема захвата предмета типа ступенчатого вала;
на фиг. 3 и А - устройство (варианты исполнения) , oCinjni вид.
Схема захвата длинномерного предмета приведена на фиг.. Для этого захватные вилки 1 , количество кото- рых не менее двух, ориентируют относительно предмета 2 вдоль его продольной оси 3 таким образом, чтобы плоскости вилок были перпендикулярны этой оси. Затем поворачивают вилки вокруг осей 4, перпендикулярных оси 3 предмета 2, в противоположных направлениях (как показано на фиг.1 пунктирными линиями со стрелками), либо часть вилок не
поворачивают,
Избирательный захват предметов тбуемого поперечного сечения из складируемого пакета обеспечивают путем предварительного поворота вилок на определенный угол.
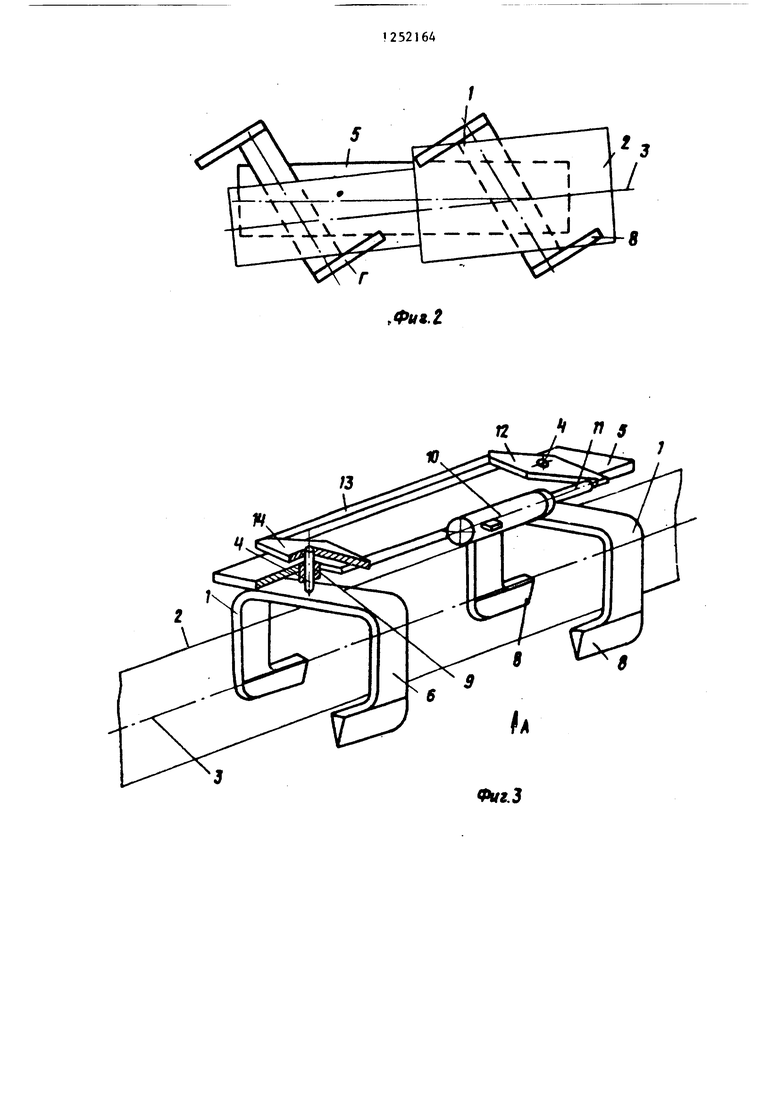
Устройство содержит захватные элементы, выполненные в виде укрепленных с необходимым интервалом повротных вилок 1 для захвата предмет 2, смонтированных под основанием корпуса 5, оси 4 вращения которых параллельны между собой и перпендикулярны продольной оси 3 захватываемого предмета 2, Каждая вилка 1 вьтолнена двузубой с неизменным расстоянием между зубьями 6. Поворотны вилки 1 снабжены расположенными на корпусе 5 устройствами 7 для их поврота на необходимь й угол в противо- положные стороны. Зубья 6 поворотны вилок 1 снабжены заостренными отсек телями 8, Оси 4 помещены во втулках 9, расположенных в корпусе 5,
Устройство ,пля поворота в проти- воположные стороны вилок 1 вокруг осей Д содержит силовой элемент 10 поступательного движения (цилиндр)
42
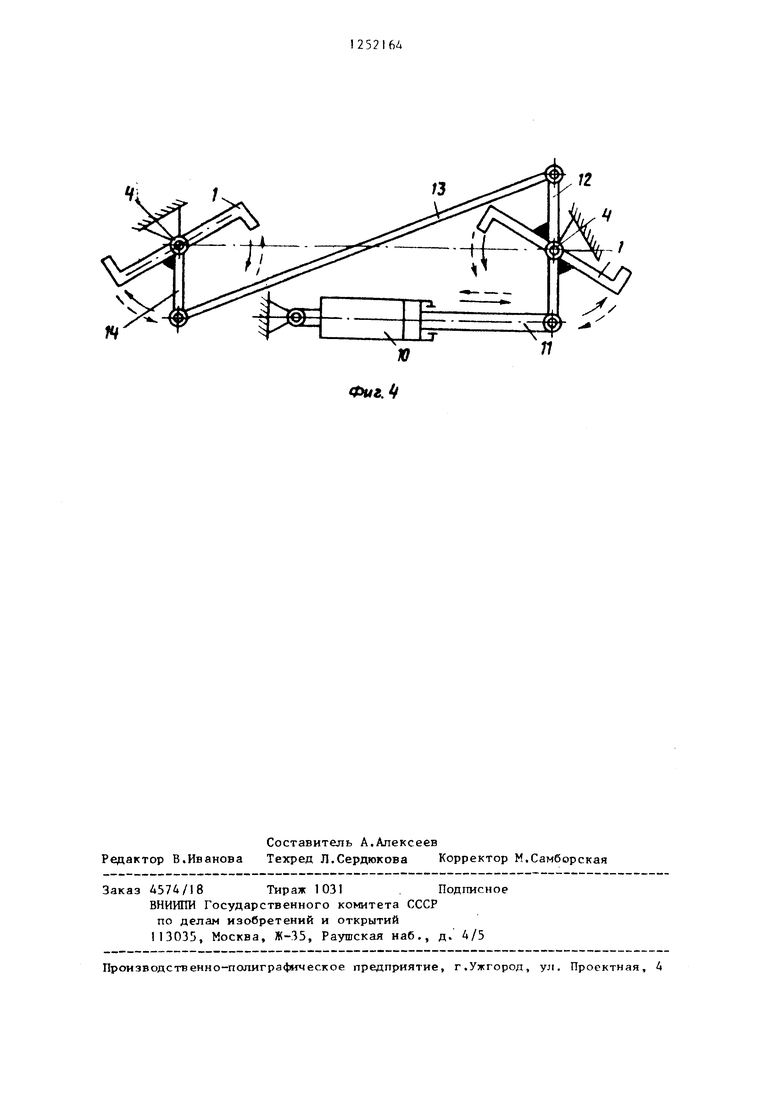
о гатпком 11 и рычажно-передаточный П-/ПКИЯМ, состоящий из двуплечего 12, тяги 13 и поворотного рыага 14, Двуплечий рычаг 12 жестко соединен с поворотной вилкой 1, а так/ке укреплен на оси 4, причем один его конец соединен шарнирно с омощью тяги 13 с поворотным рычагом 14, кпторый, в свою очередь, жестко соединен с поворотной вилкой i на оси 4, Второй конец двуплечего рь1ча- la 12 гаарнирно соединен со штоком И цилиндра 10. 3i от вариант исполнения стройства изображен на фиг. 4.
Рычаги 14 и 12 устройства совместо с гягой 3 образуют шарнирный ме- -/атгизм антипараллелограмма,
В устройство для поворота вилок в одну сторону тяга 13 и рычаги 12 и 14 образуют шарнирный механизм параллелограмма (фиг.З).
пхватное устройство работает сле- уюиа-fM образом.
В исходном положении вилки 1 установлены так, что их плоскости пер- пеи;ц1кулярны продольной оси 3 длинномерного предмета 2. После ориентирования вилок относительно предмета осуществляется и5с поворот с помощью приводного устройства. При повороте вилок I предмет зажимается внутрен- Hi-TMVi поверхностями зубьев 6 вилок, а с помощью отсекателей 8 зажатый предмет предохраняется от вьтадания из пилки. Кроме этого, заостренные концы отсекателей 8 служат для отде- ле1П1я одного предмета от другого пр И ориентировании вилок,
Ниже описано действие варианта исполнения устройства для поворота вилок в противоположные стороны (фиг,4),
В устройстве для поворота в противоположные сторо ты вилок с рычажио-передаточным механизмом при выдвижении гатока И из цилиндра 10 поворотная вилка 1, соединенная я.есгко с двуплечим рычагом 12, пово- ра 4ивается против часовой стрелки, через тягу 13 и рычаг 14 поворачи- иг.ет вторую вилку по часовой стрелке, благодаря этоьгу обеспечивается захват предмета. При вдвигании штока п в цилиндр 10 вилки 4 повора- чив;1ются в противоположную сторону, осв(7бож;1ал предмет.
ilptVmaraeMoe устройство обеспечивает и.чдсжный захват и удержание предметов.
8
,Фи1.1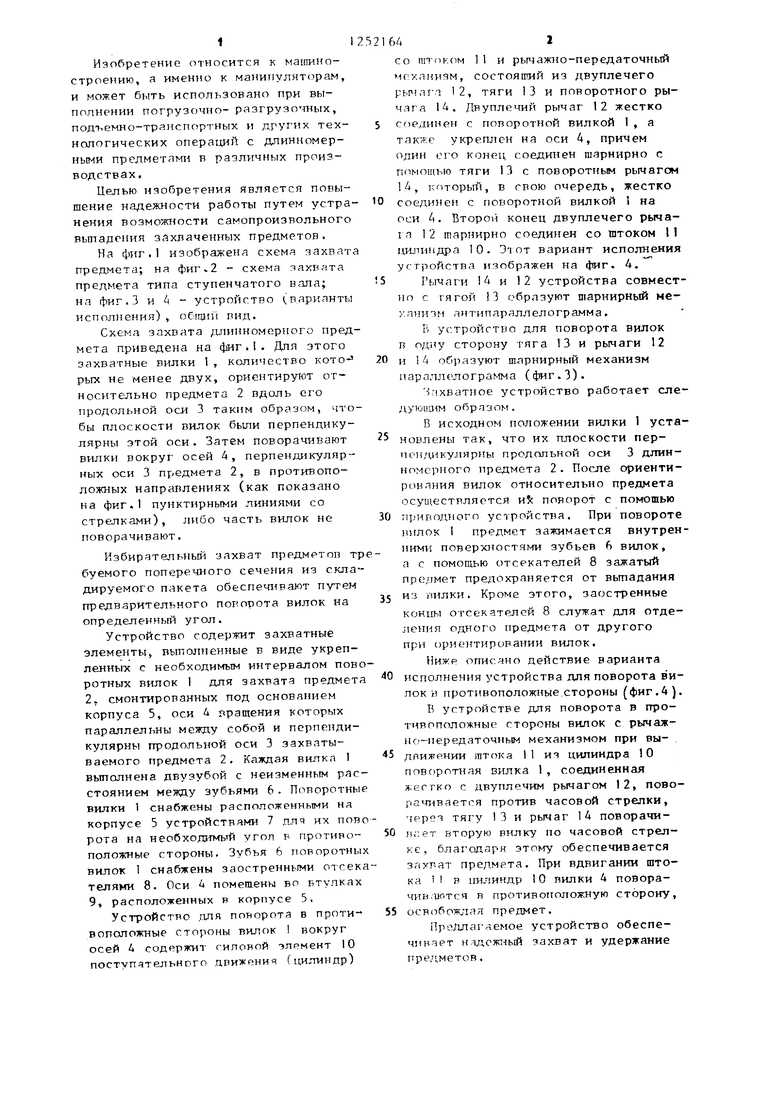
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Захватное устройство | 1988 |
|
SU1537526A1 |
| Ручная тележка для перевозки и кантования бочки | 1987 |
|
SU1449441A2 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для формирования пакетов длинномерных материалов | 1979 |
|
SU787313A1 |
| Устройство для загрузки заготовок | 1978 |
|
SU789676A1 |
| Устройство для захвата длинномерных грузов | 1986 |
|
SU1411261A1 |

/3
,
ff S
Ю.
12
Фиг.
| Самоцентрирующий зажим | 1980 |
|
SU908567A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
