Изобретение относится к машиностроению, в частности к устройствам позиционирования пневмопривода, и может быть использовано в различных отраслях народного хозяйства для автоматизации производственных процессов.
Цель изобретения - повьггаение надежности пневматического позиционера
На чертеже схематически изображено предлагаемое устройство.
Пневматический позиционер содержит цилиндр 1, шток 2, поршень 3, захват 4, управляемый упор 5, тормозной узел 6, датчик 7 обратной связи с подвижным элементом 8, пневмокла- паны 9 и 10, блок 11 программного управления с выходами 12-14 и входом 15 и гидроклапан 16. Управляемый упор 5 состоит из двух жестко связанных между собой дисков 17 и 18.
Устройство работает следующим образом.
С блока 11 программного управления по его выходу 3 на пневмокла- пан 10 подается команда выбора направления движения. Затем по выходу 12 подается сигнал, выключающий пнев- моклапан 9. Срабатывает тормозной уэег, 6, и расторможенный шток 2 перемещается в заданном направлении. Через определенный промежуток времени включается пневмоклапан 9 и тормозной узел 6 зажимает щток 2. Затем по сигналу на выходе 14 блока 11 программного управления включается гидроклапан 16, торцовые полости цилиндра 1 соединяются между собой, рабочая жидкость получает возможность свободно перетекать из одной полости в другую, диски 17 и 18 управляемого упора 5 под действием перепада давления
Редактор О.Бугир
Составитель Б.Шевченко
Техред М.Ходанич Корректор В.Бутяга
Заказ 4620/48Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. , д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
532
на поршне 3 перемещаются в заданном направлении. Во время движения управляемого упора 5 с помощью датчика 7 обратной связи формируется сигнал рассогласования. При нулевом сигнале рассогласования, поступающем на пход 15 блока 11 программного управления, последний вырабатывает команду вы- Ю1ючения гидроклапана 16. Пневматический позиционер отработал заданное перемещение.
Формула изобретения
Пневматический позиционер, содержащий цилиндр, шток с поршнем, размещенные в цилиндрр, захват, закрепленный на штоке, управляемый упор, расположенный в цилиндре, тормозной узел, закрепленный на торце цилиндра, датчик обратной связи, подвижный элемент которого прикреплен к управляемому упору, два пневмоклапана и блок программного управления с одним входом и тремя выходами, у которого вход соединен с датчиком обратной связи, а первый и второй выходы - соответственно с входами первого и второго пневмоклапанов, отличающий- с я тем, что, с целью повьштения надежности позиционирования, он допол- гительно сЬдержит гидроклапан, уп- ранляег-ый упор выполнен п виде двух жестко связанных между собой дисков, размещенных в цилиндре по разные стороны поршня, диаметры дисков равны диаметру поршни, а полости между дисками и торцовыми стенками цилиндра заполнены рабочей жидкостью и сое- ;.Ц1нены между собой через гидрокл;1пан, вход которого соединен с третьим выходом блока программного управления.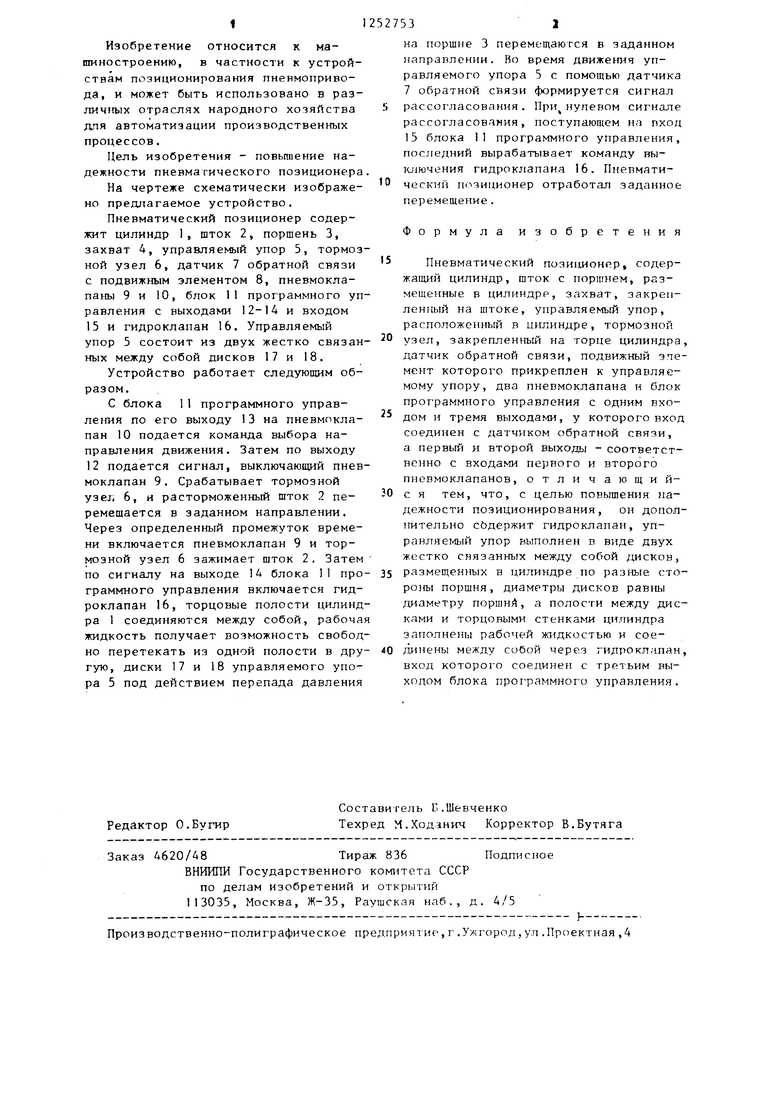
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционер | 1986 |
|
SU1388831A1 |
| Устройство для позиционирования пневмопривода | 1980 |
|
SU928303A1 |
| Устройство для переноса заготовок | 1988 |
|
SU1556929A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Пневмогидравлический следящий привод | 1980 |
|
SU876376A2 |
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| Устройство для подачи пустых и отвода наполненных коробок | 1983 |
|
SU1221065A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Устройство для управления шахтной вентиляционной дверью | 1985 |
|
SU1448075A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
Изобретение относится к системам автоматического управления, Поэиционер состоит из цилиндра со штоком, на котором закреплен захват, и управляемого упора, размещенного в цилиндре, и снабжено тормозным узлом, В цилиндре расположен выполненный в виде двух связанных между собой дисков управляемьй упор, на котором смонтирован подвижный элемент датчика обратной связи. Управление упором осуществляется гидроклапаном, что в совокупности с указанным конструктивным выполнением подвижного упора позволяет повысить надежность позиционера, 1 ил. д 10 % (Л to СП ю -v| ел со
| Устройство для позиционирования пневмопривода | 1976 |
|
SU595703A1 |
