«
Изобретение относится к автоматизации транспортных работ, вьтолня- емъгх самоходным транспортным средством, направление движения которого задается с помощью токонесущего кабеля, и может быть использовано для авгомати 1еского контроля прохождения транспортным средством определенных участков маршрута (например, ответвлений в местах поворотов, петель в местах остановов), в частности для самоходных средств с двумя колесами, имеющих минимальный радиус поворота и управляемых программно.
Цель изобретения - упрошение устройства.
(-
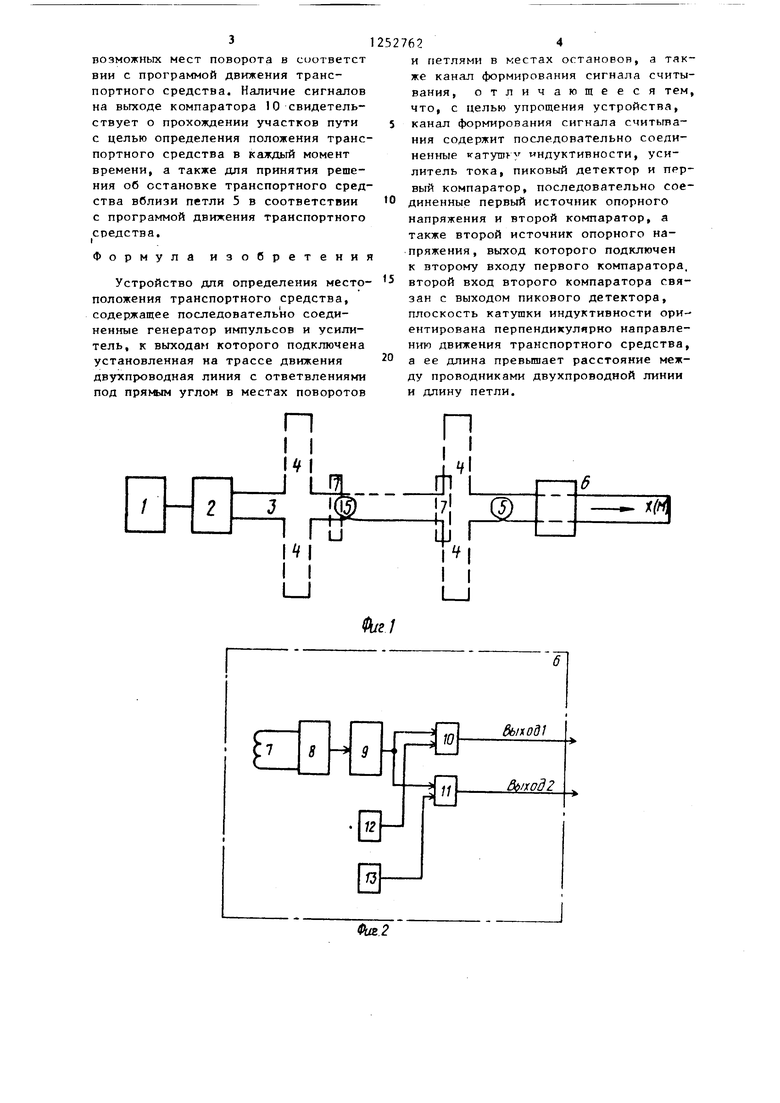
На фиг. 1 представлена схема
предлагаемого устройства на трассе движения транспортного средства (пу ;ктиром обозначено местоположени катушки); на фиг. 2 - схема канала формирования сигнала считывания, на фиг. 3 - диаграммы, поясняющие его работу.
Устройство содержит последователно соединенные генератор 1 импульсов, ус илитель 2, двухпроводную линию 3, имеющую ответвления 4 и петли 5, канал 6 формирования сигнала считывания (на транспортном средстве) , в котором катушка 7 индуктивности соединена последовательно с усилителем 8 тока и пиковым детектором 9, выход которого соединен с входами первого и второго компараторов 10 и П, другие входы которых соединены соответственно с первым и вторым источниками 12 и 13 опорного напряжения, а выходы являются первым и вторым выходами устройства.
Генератор 1 импульсов может быть построен на основе серийно выпускаемой микросхемы К 155 АГЗ КО 348, 006 ТУ 26.
Устройство работает следующим образом.
Генератор 1 импульсов через усилитель 2 (импульсных сигналов) создает электромагнитное поле на трассе движения в двухпроводной линии 3 с ответвления и 4 под прямым углом петлями 5 в местах возможных оста новок. При этом в канале 6 формировния сигнала считывания, находящемся на транспортном средстве и содержащем катушку 7, происходит преобразоние локальных участков электромагни
ного поля горизонтальной ориентации, соответствующих местам ответвлений 4, и петель 5 возможных остановок в сигнал считывания, который усиливают усилителем 8 тока, выделяют его амплитудное значение с помощью пикового детектора 9, а затем сравнивают его на компараторахJО и 11 с опорными напряжениями первого 12 и второго 13 источников опорного напряжения. Выходные сигналы компаратора 10 служат для выделения сигнала считывания в местах нахождения катушки 7 вблизи петли 5 возможной остановки и ответвления - поворота. Выходные сигналы компаратора 11 служат для выделения сигнала считывания в местах нахождения катушки 7 вблизи ответвлений 4 в местах возможных поворотов.
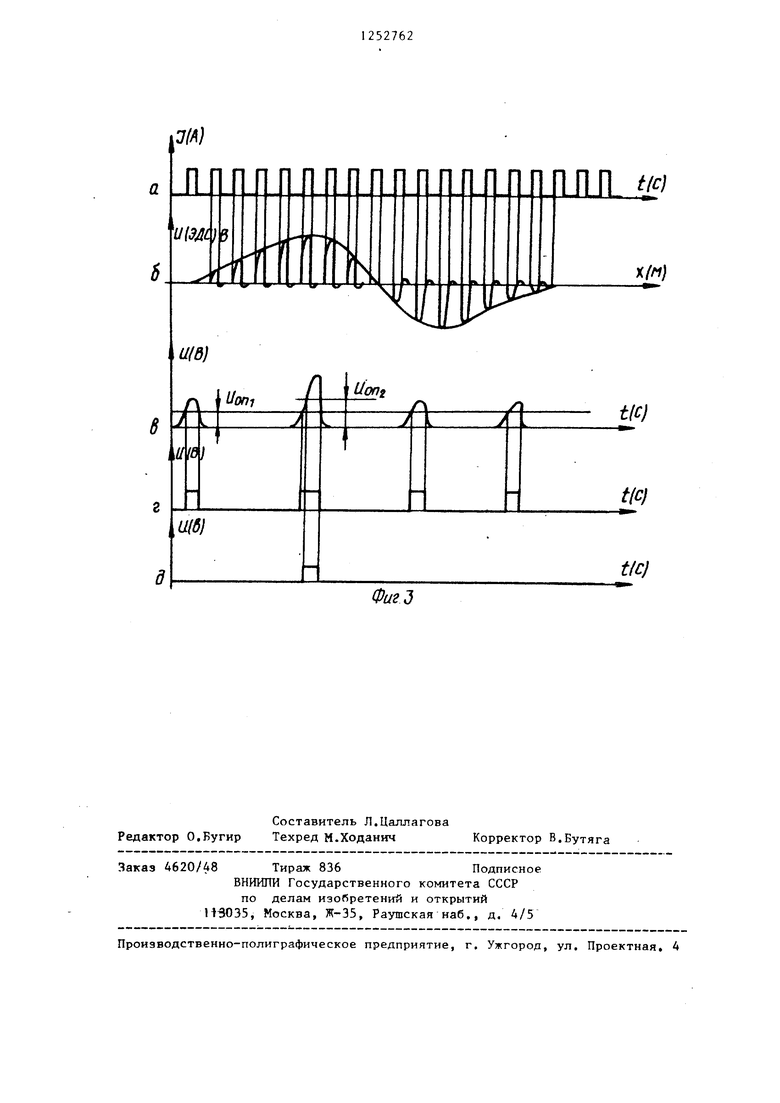
На фиг. За изображена последовательность импульсов, генерируемых генератором 1 импульсов, частота которых может быть в пределах 1-30 кГц. Импульсы тока, протекающего по двухпроводной линии 3, наводят ЭДС в катушке 7 вблизи ответвлений 5 и петель 5. Распределение сигнала при движении катушки по оси и вдоль двухпроводной линии представлено на фиг. 3S. Такой сигнал можно наблюдать на-выходе усилителя 8 тока с помощью осциллографа. Пиковый детектор 9 выделяет огибающую сигналов (фиг. ЗЬ) усилителя 8 тока и подает их на входы первого 10 и второго 11 компараторов, где происходит сравнение амплитуд этих сигналов соответственно с опорным напряжением IJpfi, на первом компараторе 10 и опорным напряжением , на втором компараторе 11.
На выходе первого компаратора 10 формируются импульсы (фиг. Зг), соответствующие сигналам как ответвлений 4, так и петель 5. На выходе второго компаратора 11 формируются сигналы (фиг. За), которые соответствуют положению катушки 7 вблизи ответвления 4.
Таким образом, наличие сигналов, одновременно на выходе 1 устройства (выход первого компаратора 10) и выходе 2 устройства (выход второго компаратора 11) свидетельствует о прохождении участка ответвлений 4 и может быть использовано для осуществления попорота на одном из
3
возможных мест поворота в сиответст ВИИ с программой движения транспортного средства. Наличие сигналов на выходе компаратора 10 свидетельствует о прохождении участков пути с целью определения положения транспортного средства в каждый момент времени, а также для принятия решения об остановке транспортного средства вблизи петли 5 в соответствии с программой движения транспортного средства,
Формула изобретени
Устройство для определения местоположения транспортного средства, содер;кащее последовательно соединенные генератор импульсов и усилитель, к выходам которого подключена установленная на трассе движения двухпроводная линия с ответвлениями под прямым углом в местах поворотов
п
to
527624
и петлями в местах остановов, а также канал формирования сигнала считывания, отличающееся тем, что, с целью упрощения устрой-ства, 5 канал формирования сигнала считьта- ния содержит последовательно соединенные «сатутаку индуктивности, усилитель тока, пиковый детектор и первый компаратор, последовательно соединенные первый источник опорного напряжения и второй компаратор, а также второй источник опорного напряжения, выход которого подключен к второму входу первого компаратора, второй вход второго компаратора связан с выходом пикового детектора, плоскость катушки индуктивности ори-- ентирована перпендикулярно направлению движения транспортного средства, а ее длина превышает расстояние между проводниками двухпроводной линии и длину петли.
5
0
П
Редактор О.Бугир
Составитель Л.Цаллагова
Техред М.Ходанич Корректор В.Бутяга
Заказ 4620/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий И5035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения местоположения транспортного средства | 1985 |
|
SU1357920A1 |
| Устройство для управления движениемАВТОМАТичЕСКОгО ТРАНСпОРТА | 1979 |
|
SU830493A1 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Устройство для передачи и приема информации с подвижного транспортного средства | 1985 |
|
SU1397954A1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Устройство для измерения скоростидВижЕНия ТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU817741A1 |
| Устройство для управления автоматически движущимся по заданному маршруту транспортным средтвом | 1984 |
|
SU1202982A1 |
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| Устройство управления транспортного средства | 1986 |
|
SU1472876A1 |
Изобретение может быть использовано для автоматического контроля прохождения транспортным средством определенных участков маршрута (ответвлений в местах возможных поворотов, петель в местах возможных остановов). Цель изобретения - упрощение устройства. Устройство содержит последовательно соединенные генератор импульсов, усилитель импульсных сигналов, питающие установленную на трассе движения двухпроводную линию с ответвлениями под прямым углом в местах поворотов и петлями в местах остановов, канал формирования сигнала считывания. Новым в устройстве является то, что в канале формирования сигнала считьгеания последовательно соединены катушка, усилитель тока, пиковый детектор, выход которого соединен с первыми входами первого и второго компараторов, вторые входы которых соединены соответственно с первым и вторым источниками опорного напряжения, а выходы являются соответственно первым и вторым выходами устройства, плоскость катушки ориентирована перпендикулярно направлению движения транспортного средства и имеет размеры, превышающие размер петли и расстояние между жилами провода, причем сигнал ответвления превышает сигнал петли. 3 ил. г W tSD ел ГС ч О) ю
| Устройство для управления движениемАВТОМАТичЕСКОгО ТРАНСпОРТА | 1979 |
|
SU830493A1 |
| Г, 08 G 1/01, 1978 | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Комнатная печь | 1925 |
|
SU977A1 |
