1
Изобретение относится к подъемно- транспортному машиностроению, преимущественно к системам управления внутризаводского транспорта, и может быть использовано при построении автоматизированных транспортных систем.
Целью изобретения является повышение функциональной надежности устройства управления транспортного средства.
На чертеже показан пример реализации предложенного устройства.
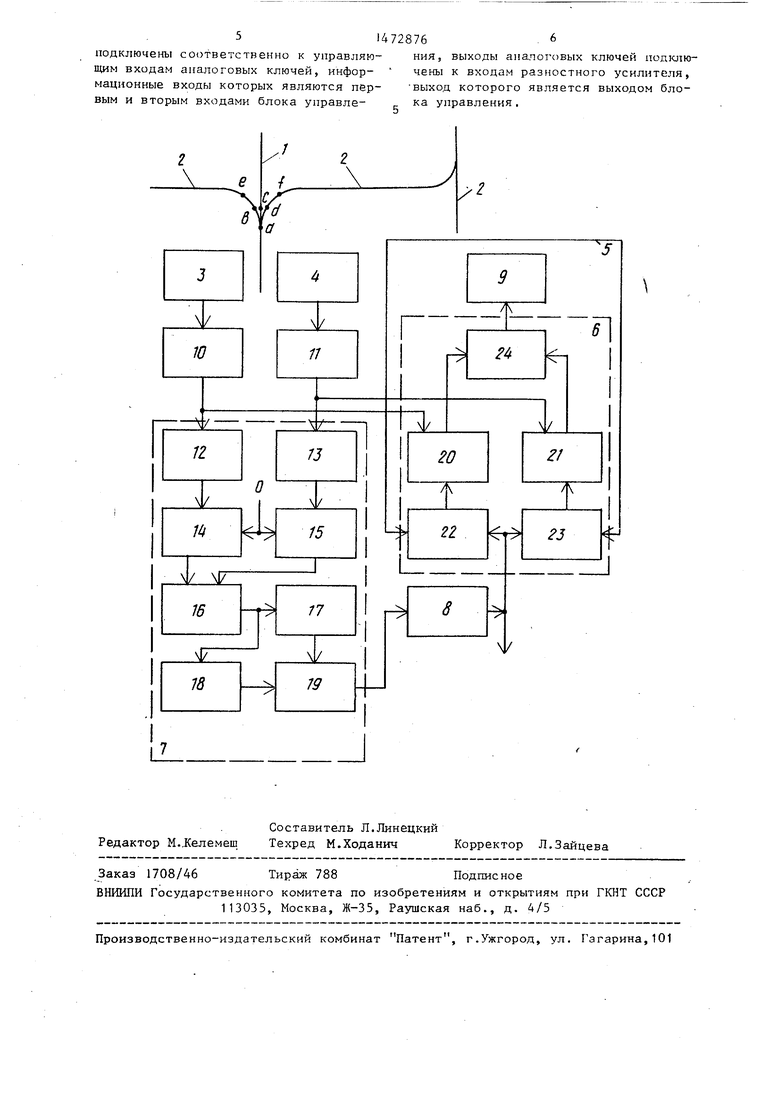
На чертеже показаны трасса-ориентир 1 с ответвлениями 2, датчики 3,4 слежения, шина 5 ввода команды направления движения транспортного средства, блок 6 управления, блок 7 распознавания развилок трассы, блок 8 задержки времени, сервопривод 9 рулевого колеса транспортното средства, детекторы 10 и 11 сигнала, дифференцирующие усилители 12 и 13, компараторы 14 и 15, элемент И 16, эчемент 17 задержки, элемент НЕ 18, ,емент
«х
аналоговые ключи 20 и 21, 22 и 23, разностный усилиУстройство работает следующим образом.
При движении транспортного средста по трассе-ориентиру 1 сигналы от атчиков 3,4 слежения через детектоы 10 и II сигнала поступают на вхоы блоков 6 и 7. При отсутствии разилок на трассе по ходу движения в аждый момент времени производные игналов имеют различные знаки либо авны нулю, но не могут быть одновременно положительными. При этом сигал на выходе блока 7 отсутствует, а сигналы с выходов детекторов 10, 11 поступают на вход разностного усиителя 24, поэтому направление движения определяется трассой-ориентиром
1.При появлении развилки по ходу вижения за счет одновременного приближения к датчикам 3,4 трассы-ориентира 1 и ответвлений 2 сигналы на выходах дифференцирующих усилителей
12,13 одновременно становятся положительными. Срабатывают компараторы 14 s 15, сигнал с выхода блока 7 запускает блок 89 на время активного состояния которого в зависимости от наличия сигналов на шине 5 сигнал от одного из датчиков 3,4 заменяется нулевым сигналом, т.е. временно имитируется уклонение транспортного средства от трассы-ориентира К Сервопривод 9 поворачивает рулевое колесо транспортного средства в соот ветствии с направлением ответвления
2,выбираемого командойs имеющейся на шине 5. Блок 8 имеет такую длительность активного состояния, что транспортное средство успевает миновать развилку. После проезда развилки устройство переходит к отслеживанию трассы-ориентира 1 (или, соответственно, ответвления 2)„ Исключение ложного распознавания слияний трассы ориентира 1 с ответвлениями
2 обеспечивается в блоке 7 путем селекции длительности импульса, формируемого на выходе элемента И 16 элементом 17 задержкиs если длительность импульса на выходе элемента И 16 меньше выдержки времени элемента 17, сигнала на выходе блока 7 не будет.
10
15
20
30
35
40
45
55
0
0
5
0
5
5
Формула изобретения.
1 . Устройство управления транспортного средства, содержащее трассуг ориентир с ответвлениями, связанную с первым и вторым датчиками слежения, установленными на транспортном средстве и подключенными через соответствующие детекторы сигнала соответственно к первому и второму входам блока управления, выход которого подключен к сервоприводу рулевого колеса транспортного средства, отличающееся тем, что, с целью повышения функциональной надежности устройства, в него введены размещенные на транспортном средстве блок распознавания развилок трассы, блок задержки времени, шина ввода команды направления движения транспортного средства в развилке трассы, выходы первого и второго детекторов сигнала подключены к соответствующим входам блока распознавания развилок трассы, выход которого подключен к входу блока задержки времени, выход которого подключен к третьему входу блока управления, шина ввода команды направления движения транспортного средства подключена к четвертому и пятому входам блока управления.
2.Устройство по п.отличающееся тем, что блок распознавания развилок трассы содержит два компара тора, элемент И, инвертор, элемент ИЛИ-НЕ, элемент задержки, первый и второй дифференцирующие усилители, входы которых являются входами блока распознавания развилок трассы, а выходы подключены соответственно к сигнальным входам первого и второго компараторов, выходы которых подключены к входам элемента И, выход которого подключен к входам элемента задержки и инвертора, выходы элемента задержки и инвертора подключены к входам элемента ИЛИ-НЕ, выход которого является выходом блока распознавания развилок трассы.
3.Устройство по п.1, отличающееся тем, что блок управления содержит два аналоговых ключа, разностный усилитель, два элемента
И, одни входы которых объединены и являются третьим входом блока управления, другие входы являются соответственно четвертым и пятым входами блока управления, выходы элементов И
514728766
подключены соответственно к управляю- ния, выходы аналоговых ключей подклю- щим входам аналоговых ключей, инфор- чены к входам разностного усилителя, мационные входы которых являются пер- выход которого является выходом бловым и вторым входами блока управле- ,. ка управления.
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Система управления движением транспортного средства | 1984 |
|
SU1228081A1 |
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
| Система управления движением транспортного средства | 1984 |
|
SU1177800A1 |
| Система управления движением транспортного средства | 1979 |
|
SU860012A1 |
| Устройство для автоматического управления движением траспортного средства | 1977 |
|
SU690450A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
Изобретение относится к подъемно-транспортному машиностроению, и может быть использовано при построении автоматизированных транспортных систем. Цель изобретения - повышение функциональной надежности устройства. При движении транспортного средства по трассе-ориентиру при отсутствии развилок на трассе сигналы на выходе дифференцирующих усилителей имеют различные знаки либо равны нулю, так что сигнал на выходе блока распознавания развилок трассы отсутствует, а по сигналам с выходов датчиков, поступающих на разностный усилитель, транспортное средство ориентируется вдоль трассы-ориентира. При наезде на развилку производные сигналов на выходах обоих детекторов одновременно положительны. При этом, если время такого состояния сигналов больше заданного элементом выдержки времени, что отличает развилку от слияния трасс ориентира с ответвлением, сигнал с выхода блока распознавания развилок трассы блокирует сигнал с выхода одного из датчиков слежения и заменяет его нулевым, в зависимости от поступившей команды, на время, определяемое активным состоянием блока задержки времени. Транспортное средство за это время совершает поворот ( или продолжает движение прямо по трассе), а затем переходит в первоначальный режим. 2 з.п. ф-лы. 1 ил.
| Система управления движением транспортного средства | 1976 |
|
SU627450A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
