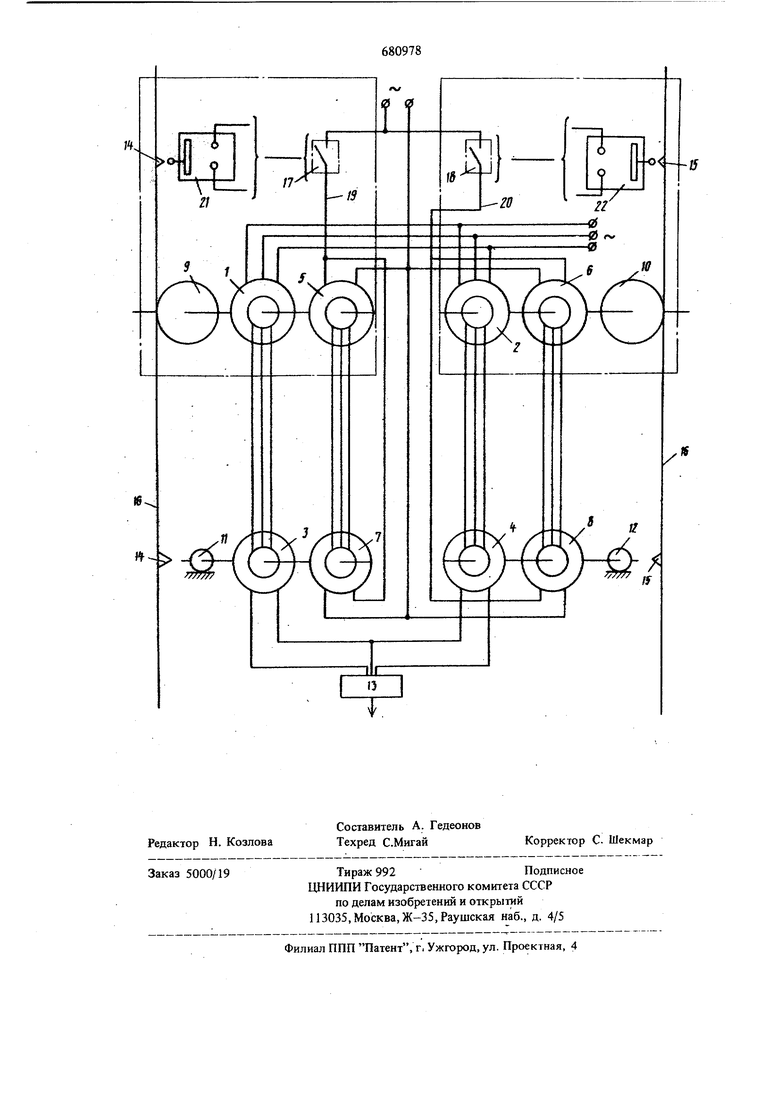
(54) УСТРОЙСТВО СИЧТХРОБИЗАЦИИ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНА трически связаны с. соответствующими сельсинприемниками 3,7, 4. Сельсин-приемники 3,4 соединены со схемой управления приводом (на чертеже не показана) через фаэочувсгвительный выпрямитель 13. Упоры 14, 15 контрольных позиций смонтированы с двух сторон пути 16 крана. Контакты 17, 18 контрольных позиций включены в цепи 19, 20 питания сельсин-датчиков 5,6. Контакты 17, 18 могут быть связаны с упорами 14, 15 через конечные выключатели 21,22 Устройство работает следующим образом. На всем пути движения крана, за исключени ем упоров 14, 15 контрольных позиций, от сельсин-датщосов 1 и 2 ш фазочувствительный выпрямитель 13, подаются напряжею1я, разност фаз которых завиогг от положения роторов сельсин-датчиков 1 и 2. Выходной сигнал фазочувствительного выпря мителя 13, пр(Я1орциональный углу рассогласования между измерттельными колесами 9 и 10 (разности фаз указанных напряжений), непрерьюно воздействует на систему управления приводом. При одновременном прохождении механизмами передвижения крши контрольных позиций 14, 15 и срабатывании контактов 17 и 18 система сельсшюв 5-8 принудительно устанавливает сельсюс-приемник 3 и 4 в согласованное с соответствукяцими сельсин-датчиками 1 и 2. На выходе фазочувствительного выпрямителя 13 сигнала нет. При неод ювременном прохождении опорами крана упоров 14, 15 контролы1ых позиций на выходе фазочувствительного выпрямителя 13. устанавливается напряжение, пропо{ящональноё абсолютному рассогласованию между механизмами передвижения опор крана, используемое в системе управления приводом для компенсации ошибки рассогласования. Формула изобретен и я Устройство синхронизации механизмов передвижения крана, содержащее основные сельсиндатчики, механически соединенные с измерительными колесами механизмов передвижения н электрически связанные с соответствующим основным сельсин-приемннком, соединенным со схемой управления приводом через фазочув-ствительньй вьтрямитель, а также упоры ксдатрольных позиций, смонтированные с двух сторон пути крана, контакты контрольных позиций, подтормаживающие устройства, механически связанные с соответствующим основным сельсин-приемником, и цепи питания, отличающееся тем, что, с целью повьпиення точности устройства, оно снабжено дополнительными сельсин-дагшками и сельсин-приемниками, причем дополнительные сельсин-датчики мехаш чески связаны с соответствующим основным сельсин-датчиком и злектрически ооеданены с соответствующим дополнительным сельсин-приемником, который механически связан с соответствующим основным сельсин-приемником, а контакты контрольных позиций включены в цепи питания дополнительных сельсин-датчиков. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР N 160288, кл. В 66 C9/16J973. 2.Авторское свидетельство СССР N 483337, кл. В 66 С 13/18, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Ограничитель перекоса опор крана мостового типа | 1981 |
|
SU948843A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Следящая система | 1978 |
|
SU744435A1 |
| Устройство для управления дизелем | 1987 |
|
SU1449684A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ | 1964 |
|
SU166943A1 |