Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для сохранения осевого направления между опорами кранов, и может быть использовано для синхронизации механизмов передвижения опор крана, например, мостового типа.
.Наиболее близким техническим решением к изобретению является устройство для синхронизации механизмов передвижения опор крана, содержащее электрически соединенные друг с другом сельсины, один из которых подключен к блоку питания, а другой - к исполнительному механизму передвижения опор, измерительные колеса, смонтированные на опорах крана, сопряженные с головками рельсов и кинематически связанные с роторами соответствующих сельсинов, упоры контрольных позиций, установленные вдоль пути крана, и ролики, взаимодействующие с упорами и смонтированные на концах рычагов 1.
Недостатком известного устройства является сравнительно сложная конструкция.
Цель изобретения - упрощение конструкции устройства..
Указанная цель достигается тем, что-в устройстве для синхронизации механизмов передвижения опор крана, содержащем электрически соединенные друг с другом сельсины, один из которых подключен к блоку питания, а другой - к исполнительному механизму передвижения опор, измерительные колеса, смонтированные на опорах крана, сопряженные с головками рельсов и кинематически связанные с роторами соответствующих сельсинов, упоры контрольных позиций, установленные вдоль пути крана, и ролики, взаимодействующие с упорами и смонтированные на концах рычагов, рычаги расположены в вертикальной плоскости и жестко соединены с роторами соответствующих сельсинов, а упоры контрольных позиций выполнены U-образными.
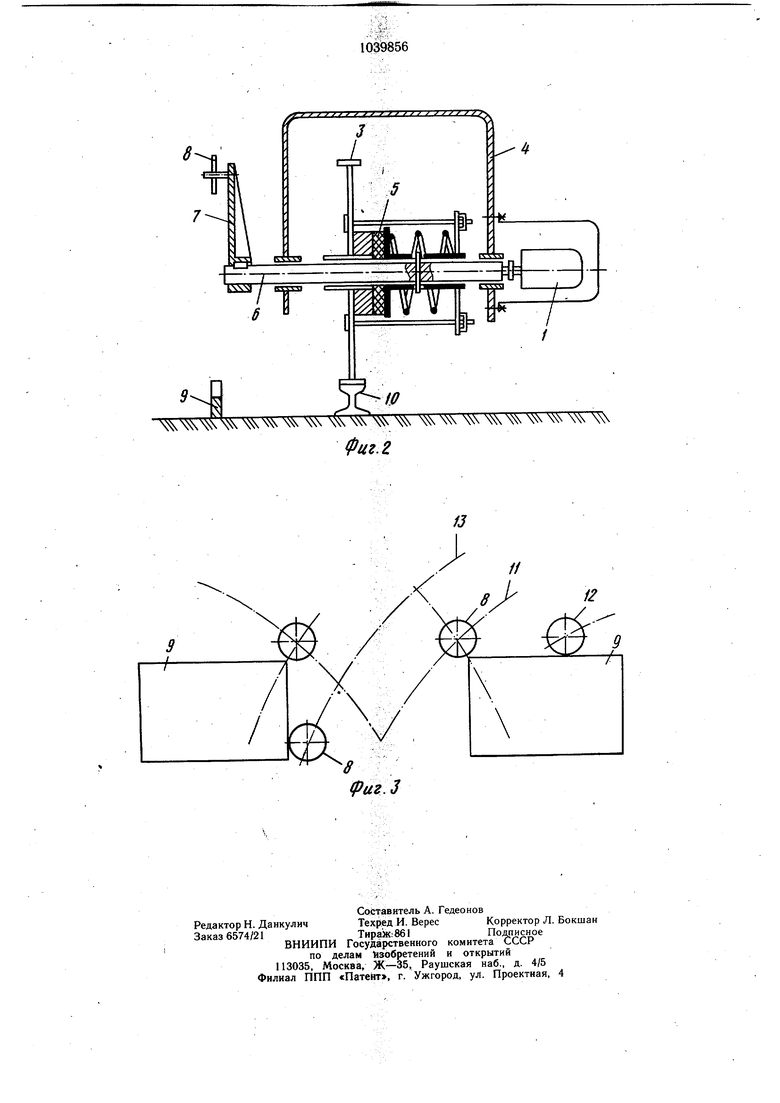
На фиг. 1 изображена электромеханическая структурная схема устройства для синхронизации механизмов передвижения опор крана; на фиг. 2 - то же, вид сбоку; на фиг. 3 - схема взаимодействия ролика с упором.
Устройство для синхронизации, механизмов передвижения опор крана содержит сельсины 1 и 2, одни обмотки которых электрически соединены друг с другом, другая обмотка сельсина 1 подключена к блоку питания (не показан), а другая обмотка сельсина 2 подключена к исполнительному механизму передвижения опор (не показан). Измерительные колеса 3 смонтированы на опорах 4 крана и через фрикционную муфту
5 и вал 6 связаны с ротором соответствующего сельсина 1(2). На валу 6 закреплен рь1чаг 7, расположенный в вертикальной плоcкoctи и несущий на конце ролик 8, взаимодействующий с U-образными упорами 9
2 контрольных позиций, расположенными вдоль пути 10 крана.
Устройство для синхронизации механизмов передвижения опор крана работает следующим образом.
При синхронном перемещении опор 4 крана сигнал на выходе сельсина 2 равен нулю. При перекосе опор 4 на выходе сельсина 2 появляется сигнал, по полярности и амплитуде которого вносят корректировку в механизмы передвижения опор 4. В случае проскальзывания колеса 3 относительно пути 10 появляется ложный сигнал о несинхронном передвижении опор 4. Для исключения влияния проскальзывания колес 3, положение роторов сельсинов 1 и 2 периодически корректируется. При отсутствии проскальзывания колеса 3 ролик 8 перемещается по траектории 11, при этом ролик 8 не взаимодействует с упором 9. При проскальзывании колеса 3 относительно пути 10, ролик 8 Движется по траектории 12 или 13, при этом он взаимодействует с горизонтальной или вертикальной поверхностью упора 9 и принудительно рычаг 7 занимает заданное положение, которое он должен иметь на контрольной позиции, а вместе с рычагом 7 это положение занимает и ротор сельсина 1 (2).
Устройство для синхронизации механизмов передвижения опор крана имеет простую конструкцию и позволяет корректировать положение сельсинов в случае проскальзывания измерительных колес.
8
NS4 ч ч v ч Ч
Фиг. г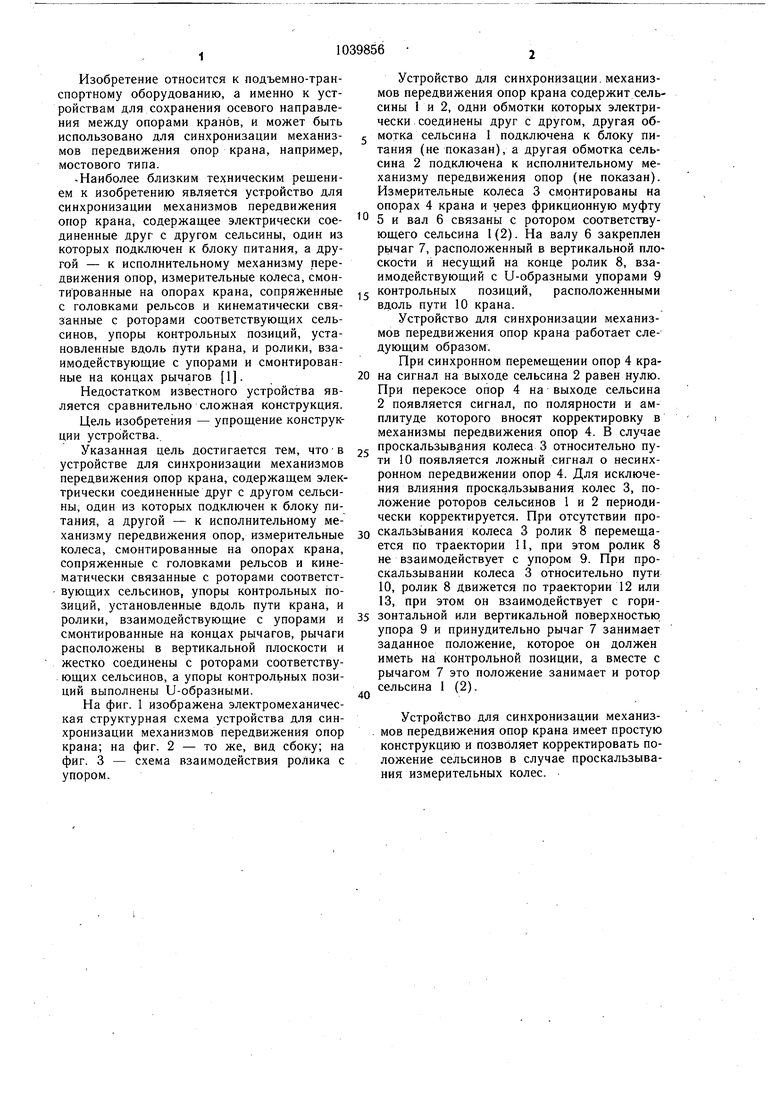
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Устройство для ограничения перекоса опор крана | 1982 |
|
SU1027131A1 |
| Устройство для синхронизации механизмов передвижения крана | 1978 |
|
SU763238A1 |
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Устройство синхронизации механизмов передвижения крана | 1978 |
|
SU680978A1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| Ограничитель перекоса опор крана мостового типа | 1981 |
|
SU948843A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
УСТРОЙСТВО ДЛЯ СИНХРОНИ. ЗАЦИИ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ ОПОР КРАНА, содержащее электрически соединенные друг с другом сельсины, один из которых подключен к блоку питания, а другой - к исполнительному механизму передвижения опор, измерительные колеса, смонтированные на опорах крана, сопряженные с головками рельсов и кинематически связанные с роторами соответствующих сельсинов, упоры контрольных позиций, установленные вдоль пути крана, и ролики, взаимодействующие с упорами и смонтированные на концах рычагов, отличающееся тем, что, с целью упрощения его конструкции, рычаги расположены в вертикальной плоскости и жестко соединены с роторами соответствующих сельсинов, а упоры контрольных позиций выполнены U-образными.
(риг 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
