Изобретение относится к измерительной технике, а именно к автоматизиро- ванкьтм грузопоршневым манометрам, и может найти применение при построении автоматизированных грузопоршневых приборов контроля и регулирования .давления сжатого воздуха.
Цепью изобретения является упрощение конструкции и гговышение надежности грузопоршневого манометра.
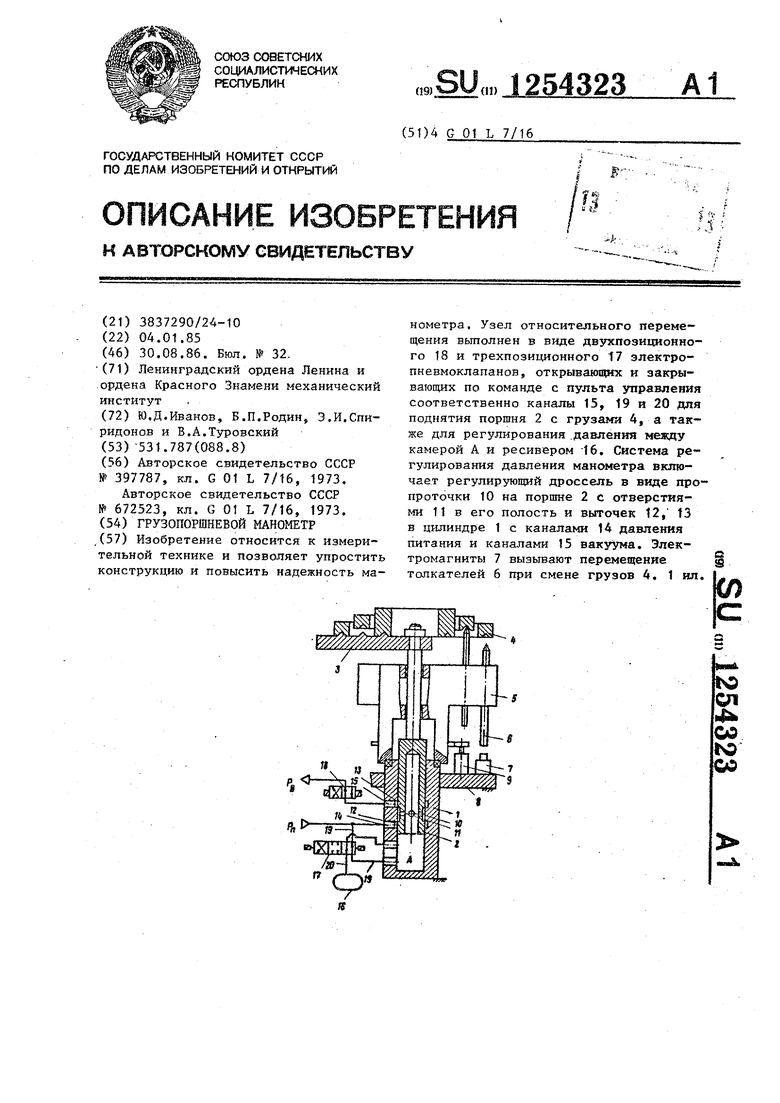
На чертеже приведена принципиальная схема грузопоршневого манометра.
Грузопоршневой манометр состоит.из ш-шиндра 1 и неуплотненного поршня 2, с которым жестко связан грузодержа- тель 3; грузов:-колец А, грузоприемной рбойьй 5 с толкателя -1и 6, электромагнитов 7 програ№5Ного механиз;ча, размещенных на основании 8.
Грузодержатель 3 и грузоприемная 5 выполнены в виде трехплечих крестовин, смещенных одна относительно другой, причем в направляющих отверстиях плеч грузоприемной обоймы 5 размещено по tpи толкателя, на каждый груз на одинаковом радиусе, а на пле- ч ах груз одержат еля 3 имеются концевые выступы, удерживающие кольца-Грузы 4 от радиальных сдвиговj тех же радиусов, что и соответствующие им толка- тели.
Поршень 2 с грузодержателем 3 и установленными грузами А и грузоприемна обойма 5 приводятся во вращение от злектродвигателя 9 через зубчатые колеса.
Система регулирования давления грузопоршневого манометра включает регулирующий дроссель, выполненный в виде проточки 10 на поршне 2 с отверстиями 11 в полость поршня, выточек 12 и 13 в цилиндре 1 с каналами давления питания 14 и вакуума 15 соответствен- ко камеру обратной связи А и ресивер 16, Между источником давления Р ежа- того воздуха и камерой обратной связи А. и ресивером 16, каналами 19 и 20 включен трехпозиционный электропнев- кокпапап 17, а между линией сброса с давлением Р. и каналом 15 - двухпо-
О
зиционный электропневмоклапан 18.
В исходном состоянии грузы 4 находятся на грузодержателе 3, электромагниты 7 обесто чены, толкатели 6 в крайнем нижнем положении, клапан 17 в нейтральном (первом) положении (закрыты каналами 19 и 20), клапан 18 в любом из возможных двух.
Перед началом работы манометра включается злектро- и пнев1- опитан е а грузы 4 снимаются с грузодержателя и перемещаются на толкатели 6 грузо- приемйой обоймы 5 следующим образом о
По команде с пульта управления одновременно поступают сигналы на клапаны 17 и 18 так, что клапан 18 закрывает канал между линией сброса и каналом 15 (первое положение), а клапан 17 открывает канал 19 и закрывает канал 20 (второе положение). Сжатый воздзгх под давлением Р заполняет
п
камеру обратной связи и под его действием поршень 2 с грузами 4 поднимается в крайнее (установочное) положение. В момент прихода поршня 2 в крайнее верхнее положение с пульта управления подается команда на электромагниты 7 програ тмного механизма, который приводит все толкатели 6 в крайнее верхнее положение, воздействуя на их торцы якорями электромагнитов 7, Затем на клапаны 17 и 18 и электромагниты 7 одновременно поступают команды с пульта управления, под действием которых клапан.17 возвращается в исходное положение (каналы 19 и 20 закрыты), клапан 18 открывает 15 сброса, а электромагниты 7 обесто- :Чиваются и их якоря возвращаются в исходное положение. При давлении в камере Л поршень 2 ог ускается в исходное положение и при своем ходе вниз передает грузы 4 с грузодержателя 3 на толкатели 6 грузоприемной обоймы 5, занимающие в данный момент крайнее верхнее положение.
Ход вверх поршня 2 при смене грузов, взаимное расположение по вертикали грузодержателя 3 и грузоприемной обоймы 5 с толкателями 6 и ход толкателей 6 согласованы с гeoмeтpичecки ш размерами проточки 10 на поршне 2 и выточек 12 jf 13 в цилиндре 1 такд что обеспечивают их взаимодействие и работоспособность.
Таким образом, устройство подготовлено к работе.
При воспроизведении определенного значения давления в ресивере грузы на Грузодержатель поршня устанавливаются следующим образом.
На клапаны 17 и 18 подаются команды, которые приводят их в рассмотренное положение, т. е, открывается канал 19, закрывается канал 20 клапана 17, закрыт канал 15 клапана 18. Сжатый воздух под давлением Р,, поступает в камеру А и поднимает поршень с гру- эодержателем вперх, при этом грузы снимаются с толкателей и в крайнем верхнем положении поршня размещаются на грузодержателе, а толкатели возвращаются в крайнее нижнее положение В этот момент поступает команда установки грузов, соответствующих воспроизводимому давлению,, на электромаг- киты программного механизма, под действием которой якоря электромагнитов, не участвующих в созданий определенной комбинации грузов, поднимаются и перемещают толкатели вверх для приема этих грузов.
Затем с пульта управления поступают команды на клапан 18, которые от- крывают канал t5 сброса (второе положение) , и на электромагниты 7 для их обесточивания. Поршень 2, опускаясь вниз, принимает на грузодержатель 3 грузы 4, участвуюп(ие в создании определенного значения давления. В момент прихода поршня 2 в положение равновесия с пульта управления поступает команда на клапан 17, которая закрывает канал 19 и открывает канал 20 (третье положение). В этом положении клапанов 17 и 18 открыт канал 15 сброса, обеспечена связь между камерой А и ресивером 16 и начинается процесс регулирования давления, обычный для автоматических грузопоршневых манометров. Переход к другому значению воспроизводимого давления происходит аналогично.
Предлагаемая схема устройства для установки и снятия грузов к грузопор
шневым манометрам может быть применена в производственных условиях для
Редактор А.Гулько
Составитель А.Соколовский
Техред Л.Сердюкова Корректор А.Зимокосов
Заказ Ayil/ iS Тираж 778Подписное
ВНЖПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
5 to (5
2025 зо
5
0
автоматизации контрольно-измерительных процессов. Упрощение конструкции и связанное с ним повышение надежности устройства позволяет снизить расходы на изготовление и эксплуатацию прибора в целом, создать автоматизированный, надежно работающий, грузопоршне- вой прибор, исключающий оператора из процесса контроля и улучшающий условия труда за счет полной замены ртутных манометров.
Формула изобретения
Грузопьрщневой манометр, содержа- нщй неуплотнекный поршень, размещенный в цилиндре, систему регулирования давления, в которую входят регулирутощий дроссель с источником давления и линией сброса, камера обратной связи и ресивер, устройство для установки и снятия грузов, состоящее из грузодер- жателя, жестко соединенного с поршнем манометра, комплекта грузов-колец, грузоприемной обоймы с толкателями, узлом относительного перемещения гру- зодержателя и грузоприемной обоймы, программного механизма с электромагнитами и схемы управления, отличающийся тем, что, с цепьга упрощения конструкции и повышения надежности манометра, узел относительного перемещения выполнен в виде трехпози- ционного и двухпозиционного электро- пневмоклапанов, первый из которых соединен с источником давления, камерой обратной связи и ресивером, а второй установлен на линии сброса регулирующего дросселя, при этом электропнев- моклапаны электрически связаны со схемой управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузопоршневой манометр | 1981 |
|
SU974165A1 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU672523A1 |
| УСТРОЙСТВО для УСТАНОВКИ и снятия ГРУЗОВ к ГРУЗОПОРШНЕВЫМ МАНОЛ\ЕТРАМ | 1973 |
|
SU397787A1 |
| Грузопоршневой манометр | 1986 |
|
SU1317294A1 |
| Грузопоршневой манометр | 1984 |
|
SU1170296A1 |
| Механизм наложения грузов с программнымупРАВлЕНиЕМ для гРузОпОРшНЕВОгО MAHOMETPA | 1977 |
|
SU636948A1 |
| Грузопоршневой манометр | 1985 |
|
SU1262311A1 |
| Грузопоршневой манометр абсолютного давления | 1983 |
|
SU1158989A1 |
| Гидравлический поршневой манометр | 1948 |
|
SU79202A1 |
| Грузопоршневой манометр | 1981 |
|
SU974166A1 |
| УСТРОЙСТВО для УСТАНОВКИ и снятия ГРУЗОВ к ГРУЗОПОРШНЕВЫМ МАНОЛ\ЕТРАМ | 0 |
|
SU397787A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU672523A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
