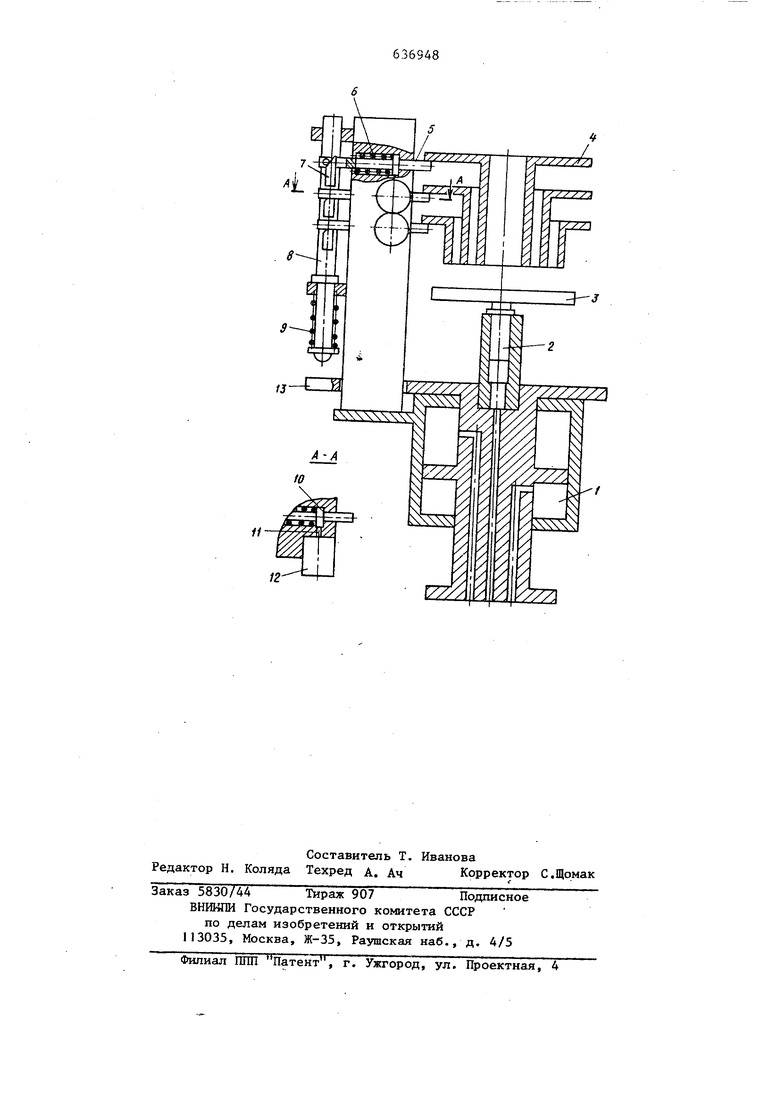
Изобретение относится к контрольн измерительной технике, а более конкретна - к автоматизированным грузопоршневым манометрам или киаче к автоматическим задатчикам давления. Известны механизмы, у которых грузы накладываются последовательно при перемещении грузоьой каретки в ряд фи1Реированных положений. Каждому положению каретки соответствует сумма весов наложенных грузов fl j. Недостатком указанных механизмов является невозможность одновременно накладывать любую запрограммированную комбинацию грузов. Наиболее близким решением из известных к изобретению является устройство, содержащее грузоприемную тарелку, жестко связанную с поршнем, на которой лежит, кo mлeкт грузов колец и программный механизм с передвижной опорой и управляющими электромагнитами. Вместе г. грузоприемной тарелкой вращается обойма с толкате™ лями, под которьгми расположены кольца с упораьи. Каждое кольцо с упорамисвязано с якорем своего электромагнита. Для изменения нагрузки вспомога- тельный электродвигатель при помощи кулачка поднимает всю обойму, а затем снова отпускает. В верхнем положении обой№. из-под тех грузов, которые должны остаться лежать на поршне, зле;1стромагниты убирают упоры, и соответствующие толкатели вместе с обоймой возвращаются в нгаснее положение. Остальные толкатели, упираясь в упоры, не дают грузам опуститься на грузоприемную тарелку {2 . В этом устройстве весь механизм наложения грузов вращается вместе с поршнем и питание к злектромагиитам необходимо по;щодить через контактные кольца. Грузы-кольца должны занимать на грузоприемной тарелке одинаковую ширину, чтобы разместить механизм их наложения, что усложняет создание набора из легких и тяжелых грузов 3 и увеличивает диаметр грузоподъемной тарелки и ее вес. Целью изобретения является повышение грузоподъемности и надежности и обеспечение вoзмoжJiocти большей дифференциации грузов по весу. Указанная цель достигается тем, что в механизме наложения грузов с программным управлением для грузопоршневого манометра, содержащем грузоприемную тарелку, жестко связанную с поршнем манометра, комплект грузов.и программный механизм с перед вижной опорой и управлянщими электромагнитами, программный механизм снаб,жен тремя раслоложенными по окружности под углом i 20 вертикальным рядами зацепов, связанных через пружину с соответствующими кулачками, закрепленными на общей рейке, установленной с возможи-остью вертикального перемещения и взаимодействия с передвижной опорой механизма, при этом каждый зацеп выполнен с буртиком, против которого установлен шток электромагнита а грузы выполнены в виде концентричес ких цилиндров разной высоты, верхняя часть которых имеет форму дисков с одинаковым наружным диаметром. На фигЛ схематически изображен предг1ожен1а й мехаьшзм наложения грузов; на фиг.2 - разрез А-А на фиг.. Механизм наложения грузов содержит гидроцилиндр 1 подъема и опускания грузов, колонку 2 грузопоршневого манометра с грузоприемной тарелкой 3 набор из семи грузов 4, три вертикал ных ряда 3ai.i,enoB 5, расположенных по семь штук под углом 120 по отношению к плоскости грузов. Зацепы под жаты пружинами 6 и могут оттягиваться кулачками 7, которые закреплены на трех общих рейках 8, оттягиваемых вниз пруисинами 9, Каткдый зацеп имеет буртик 10, против которого располагается шток 11 электромагнита 12. С неподвижной частью механизма соеди нена плита 13. Механизм работает следуютцим образом. 1ДИЛИНДР гидроцилин/|ра 1 опускается вместе с подвижной частью всего механизма, прн этом сначала все грузы 4 опускаются на грузоприемную тарапку 3, а затем кулачковая рейка 8 упирается в неподвижное основание механизма, сжимаются пружины 9 и кулачкш.и 7 оттягивают все зацепы 5 8 в крайнее левое (на чертеже) положение. При этом включаются в соответствии с программой электромагниты 12 и их штоки 11 высовываются перед буртиками 10 зацепов 5. При обратном ходе гидроцилиндра I и подвижной части механизма освобождаются только,, те зацепы, у которых не были включены электромагниты. Они поднимают лишние грузы с грузоприемной тарелки. Предлагаемая конструкция механизма наложения грузов обеспечивает возможность изготовить грузы со значительной разницей по весу, требует незначительной мощности от программного устройства для привода электромагнитов и исключает поломку механизма и сбой программы в случае аварийных отключений электропитания. Испь1тания показали надежность механизма и подтвердили все указанные преимущества. Формула изобретения Механизм наложения грузов с программным управлением для грузопоршневого манометра, содержащий грузоприемную тарелку, жестко связанную с : поршнем манометра, комплект грузов и программный механизм с передвижной опорой и управляющими электромагнитами отличающийся тем, что, с целью повьппения грузоподъемности, надежности и возможности большей дифференциации грузов по весу, программный механизм снабжен тремя расположенными по окружности под углом 120 вертикальными рядами зацепов, связанных через пружину с соответствующими кулачками, закрепленными на общей рейке, установленной с возможностью вертикального перемещения и взаимодействия с передвижной опорой механизма, при этом каждый зацеп выполнен с буртиком, против которого установлен шток электромагнита, а гру зы выполнены в виде концентрических цилиндров разной высоты, верхняя часть которых имеет форму дисков с одинаковым наружным диаметром. Источники информации, принятые во внимание при экспертизе 1 о Авторское свидетельство СССР № 242463, G О L 25/00, 1969. 2. Авторское свидетельство СССР W 397787, ют, С 01 L 7/16, 1973.
1
12

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм наложения грузов для грузопоршневого манометра | 1983 |
|
SU1163167A1 |
| Грузопоршневой манометр | 1990 |
|
SU1765727A1 |
| Грузопоршневой манометр | 1985 |
|
SU1254323A1 |
| МАНОМЕТР ИЗБЫТОЧНОГО ДАВЛЕНИЯ ГРУЗОПОРШНЕВОЙ | 1998 |
|
RU2162212C2 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU672523A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Устройство для автоматизирован-НОй уСТАНОВКи гРузОВ | 1978 |
|
SU794407A1 |
| Автоматический задатчик давления | 1975 |
|
SU624464A1 |
| Устройство для задания давления | 1980 |
|
SU885849A1 |
| Устройство для автоматизированной установки и снятия грузов | 1983 |
|
SU1174798A1 |