Изобретение относится к машиностроению и может быть иснользовано при создании промышленных роботов и аЕ тооперато- ров.
Целью изобретения является повышение надежности устройства в работе.
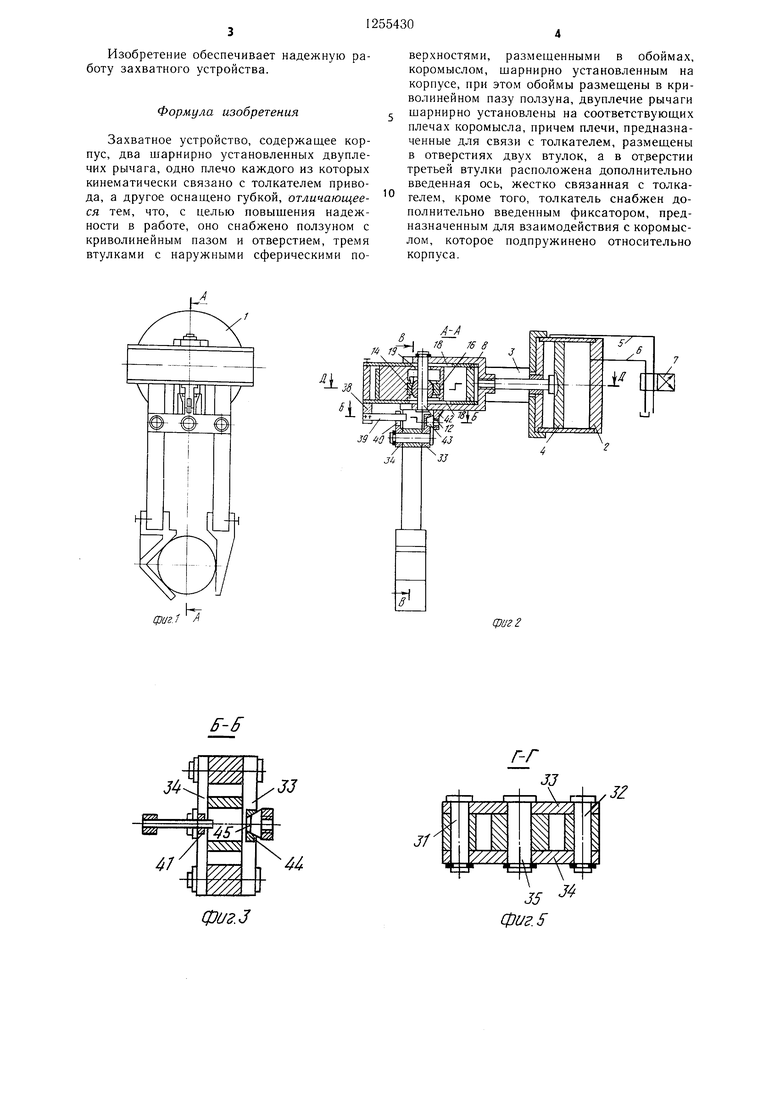
На фиг. 1 представлено захватное устройство, обший вид; на фиг. 2 - разрез Л-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 4; на фиг. 6 - разрез Д-Д на фиг. 2 (губки захватного устройства находятся в разжатом сЪстоянии); на фит. 7 - то же, (губки захватного устройства находятся в сжатом состоянии); на фиг. 8 -- разрез Е-Е на фиг. 6.
Захватное устройство содержит корпус 1, с которым жестко связан приводной цилиндр 2, содержащий шток 3 и поршень 4, иггоковая полость приводного цилиндра 2 магистралью 5, а бесштоковая полость магистралью б связаны с распределителем 7, шток 3 связан с толкателем. 8, расположенным в пазах 9, выполненных в крыпжах Ш и 11, жестко связанных с корпусом 1, в толкателе 8 закреплена ось 12, на которой установлена втулка 13, наружная обойма 14 которой, установлена в криволинейном пазу 15 ползуна 16, с которым жестко связан ограничитель 17. В крышках 10 и И выполнены продольные пазы 18, в ползуне 16 - отверстие 19, через которое проходит ось 12. Ползун 16 находится в пространстве, ограниченном корпусом 1, крышками 10 и II и стяжкой 20, в криволинейном пазу 15 ползуна 16 установлены обоймы 21 п 22 с втулками 23 п 24, в отверстиях 25 которых расположены цилиндрические концы 26 и 27 рычагов 28 и 29. В крышке 11 выполнены ноперечпые пазы 30, li KOTOpi ix находятся рычаги 28 и 29, последние осями 3 и 32 связаны с коро.мыслами 33 и 34, которые сидят на оси 35, установленной в держателе 36, жестко связанном с-крьн11кой 11, в держателе 36 вынолнено окно 37. С крышкой 11 жестко связан крон1нтейн 38, в котором одним концом установлена пластинчатая пружина 39, другой конец которой расположен в пазу 40, выполненном в высту- не 41 коромысла 34, а с толкателем 8 жестко связан кронштейн 42, в котором закреплен конусный фиксатор 43, а в выступе 44 коромысла 33 вынолнепо конусное отверстие 45, на концах рычагов 28 и 29 закреплены губки 46 и 47. Губка 46 имеет две поверхности 48 и 49, образуюн:1,ие призму. Захватное устройство работает следующим образом (фиг. 2).
При поступлении энергоносителя от рас- феделителя 7 но магистрали 5 в штоковую полость приводного цилиндра 2 шток 3 с поршнем 4, толкателем 8, осью 12 и втулкой 13 перемещаются вправо. Втулка 13 через обойму 14 воздействует па стенку на
за 15 ползуна 16, который неремещается вправо, стенки криволинейного паза 15 воздействуют на обоймы 21 и 22 втулок 23 и 24, которые начинают расходиться от продольной оси, и при воздействии на цилиндрические концы 26 и 27 рычагов 28 и 29 последние поворачиваются вокруг осей 31 и 32, губки 47 и 46 сближаются, происходит зажим детали.
При поступлении энергоносителя от распределителя 7 по магистрали 6 захватное устройство работает в обратном норядке, и происходит разжим детали.
При смещении вертикальной оси захватного устройства относительно вертикальной
оси детали работа захватного устройства нро- нсходит следующим образом (фиг. 2).
При ноступлении энергоносителя в щто- ковую полость приводного цилиндра 2 поршень 4, шток 3, толкатель 8, ось 12 и втулка 13 пе)емещаются вправо, вправо перемещается ползун 16 и ограничителем 17, обоймы 21 и 22 расходятся, а губки 46 и 47 сходятся, при этом губка 46 касается детали, а между губкой 47 и деталью имеется зазор. Так как толкатель 8 нродолжает перемещаться вправо с втулкой 13 и осью 12, то ползун 16 с ограничителем 17 перемещаются вправо и опускаются вниз. За счет того, что втулка 24, связанная с рычагом 28 и губкой 46, стоит на месте, перемещение ползуна 16 вправо и вниз нроисходит до тех нор,
пока рычаг 29, поворачиваясь вокруг оси 32, не коснется губкой 47 детали, после чего нроисходит зажим детали.
При поступлении энергоносителя в бес- штоковую полость толкатель В, ось 12 и втулка 13 перемещаются влево, при этом
ползун 16 с ограничителем 17, а также рычаги 28 и 29 с губками 46 и 47 устанавливаются симметрично относительно вертикальной оси схвата за счет того, что обоймы 22 и 21 входят в контакт с обоймой 14 втулки
13, а втулка 13 перемещается вдоль оси симметрии схвата, при этом возникают силы, вызывающие симметричное расположение указанных деталей.
При разжиме рычаги 28 и 29 занимают си.мметричное относительно оси захватного
устройства положение за счет того, что на коромысле 34 имеется выступ 41, в пазу 40 которого сидит пластинчатая нружина 39, которая при повороте коромысла 34 вокруг оси 35 создает реактивный момент, способствующий возвращению рычагов в исходное положение. Для ликвидации гистерезиса пружины и разгрузки ее от знако- неременнЕлх напряжений при нереносе разжатого схвата в пространстве служит конусный фиксатор 43, который входит в конусное отверстие 45 выступа 44 коромысла 33 и тем самым фиксирует коромысла относительно поворота их вокруг оси 35 в разжа- то.м состоянии губок 46 и 47.
Изобретение обеспечивает надежную работу захватного устройства.
Формула изобретения
Захватное устройство, содержащее корпус, два шарнирно установленных двуплечих рычага, одно плечо каждого из которых кинематически связано с толкателем привода, а другое оснащено губкой, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено ползуном с криволинейным пазом и отверстием, тремя втулками с наружными сферическими по
верхностями, размешенными в обоймах, коромыслом, щарнирно установленным на корпусе, при этом обоймы размещены в криволинейном пазу ползуна, двуплечие рычаги шарнирно установлены на соответствующих плечах коромысла, причем плечи, предназначенные для связи с толкателем, размещены в отверстиях двух втулок, а в отверстии третьей втулки расположена дополнительно введенная ось, жестко связанная с толка- гелем, кроме того, толкатель снабжен дополнительно введенным фиксатором, предназначенным для взаимодействия с коромыслом, которое подпружинено относительно корпуса.
фа г 2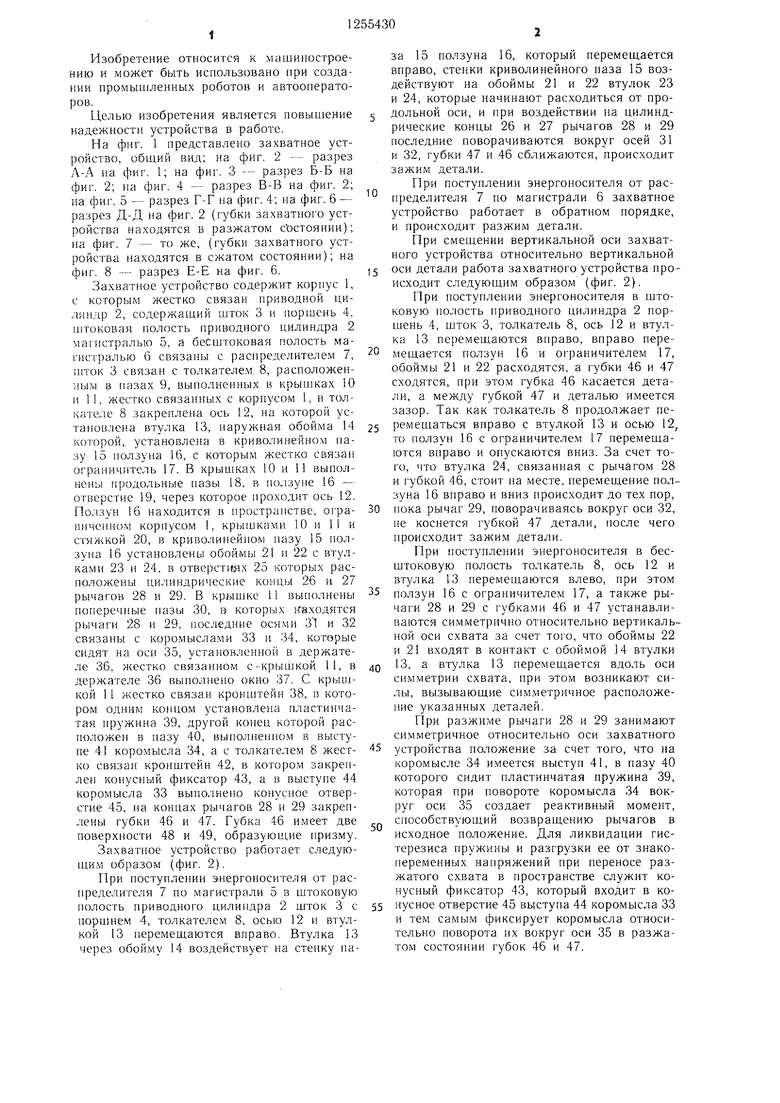
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1256956A1 |
| Стенд для сборки траков гусеничной цепи | 1988 |
|
SU1549667A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Схват манипулятора | 1982 |
|
SU1041286A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Автомат для резки капиллярных труб | 1986 |
|
SU1360919A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
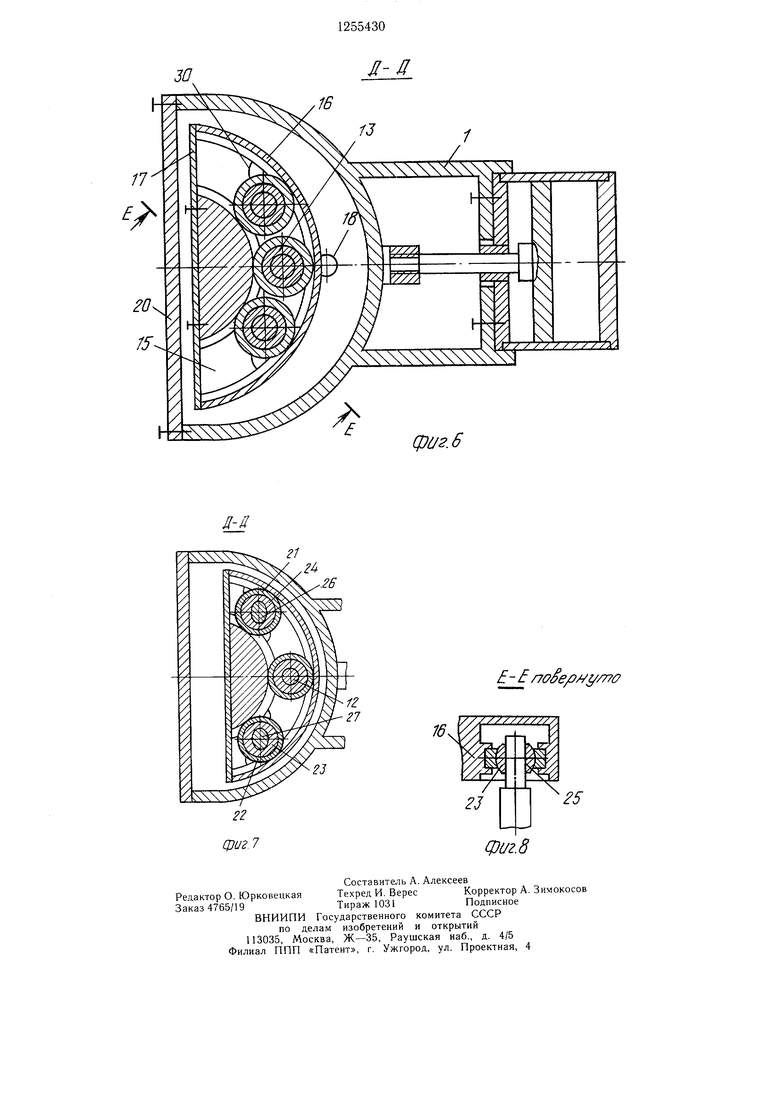
Изобретение относится к машиностроению, преимущественно к конструкциям манипуляторов. Целью изобретения является .повышение надежности работы. В корпусе 1 захватного устройства размеш,ены привод с толкателем 8. Толкатель связан с ползуном 16, в криволинейных пазах которого размещены втулки 23 и 24 с обоймами 21 и 22, захватные рычаги (ЗР) 28 и 29 шарнирно установлены на коромыслах. Одно из плеч каждого ЗР размеш,ено в отверстии соответствующей втулки. Другое плечо каждого ЗР оснащено губками 47 и 46, по меньшей мере одна из которых призматическая. При воздействии на одну из граней объектом манипулирования происходит поворот коромысла и перемещение плеча ЗР в отверстии втулки. В раскрытом положении коромысло фиксируется фиксатором, закрепленным на толкателе. В нейтральные положения коромысло приводится упругим элементом. 8 ил. В-8 to 8 (Л to 01 сд со 47
Г-Г
фиг.
фиг. 5
Л-Л
фиг. 6
2Б
фиг.7
Е- (
Фиг.8
Составитель А. Алексеев
Редактор О. ЮрковецкаяТехред И. ВересКорректор А. Зимокосов
Заказ 4765/19Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Схват манипулятора | 1982 |
|
SU1041286A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
