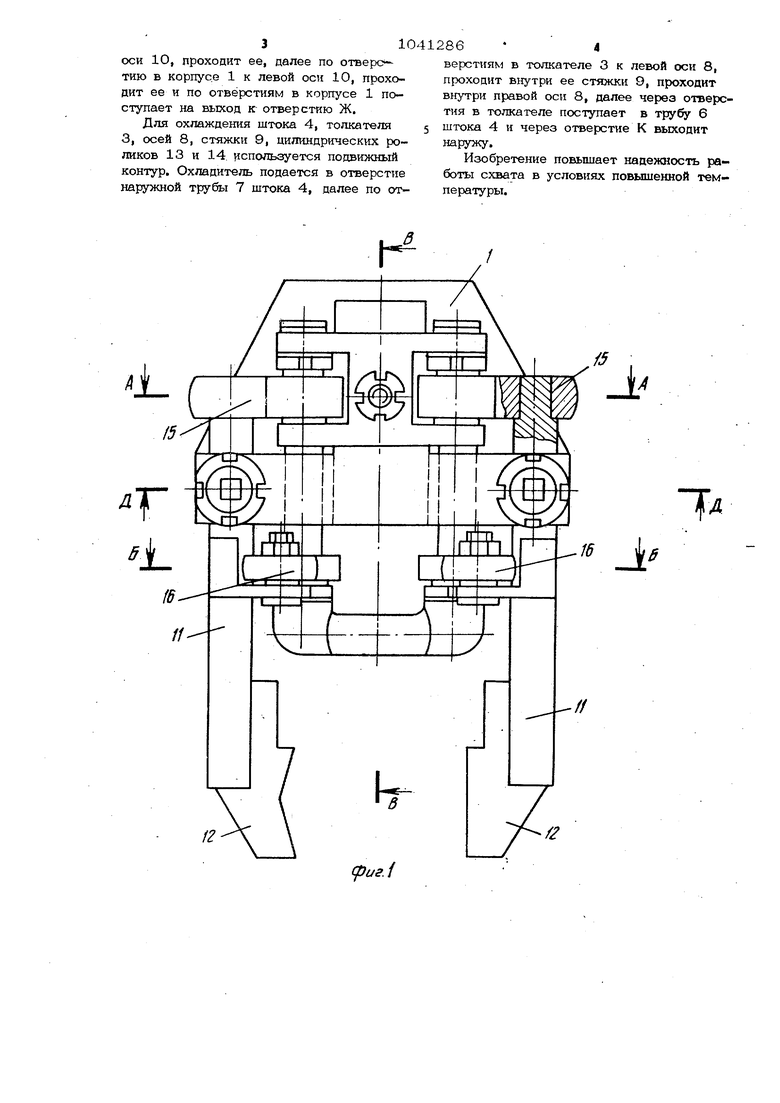
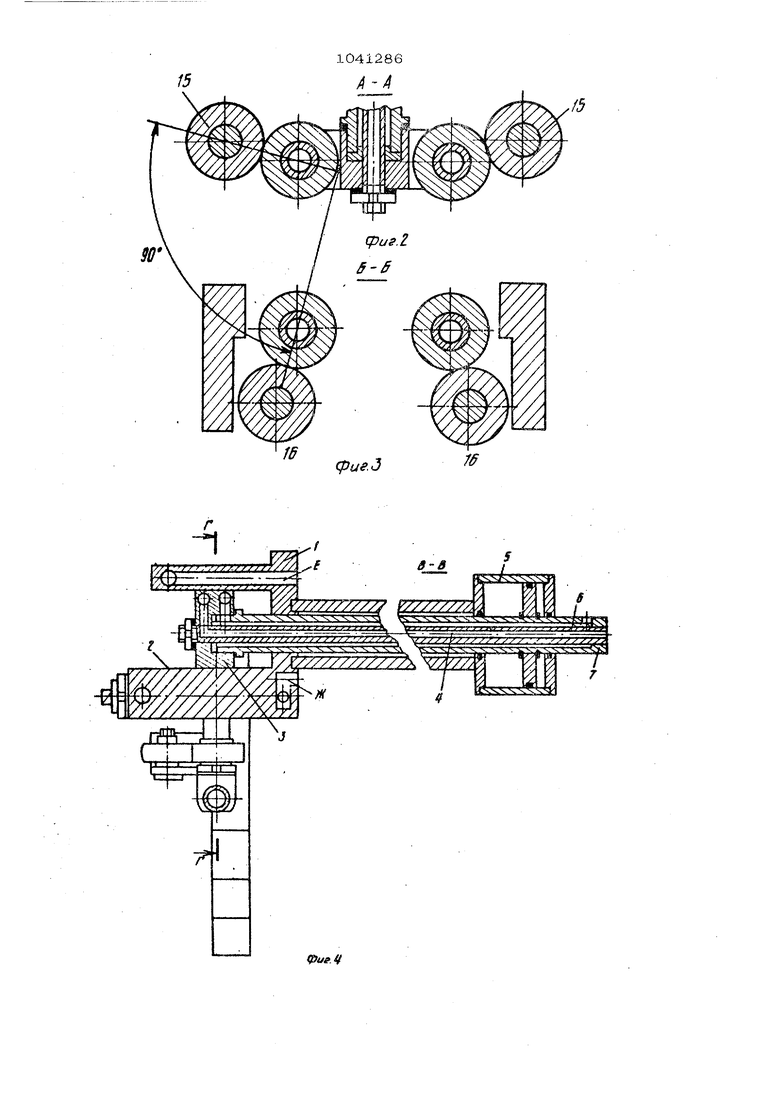
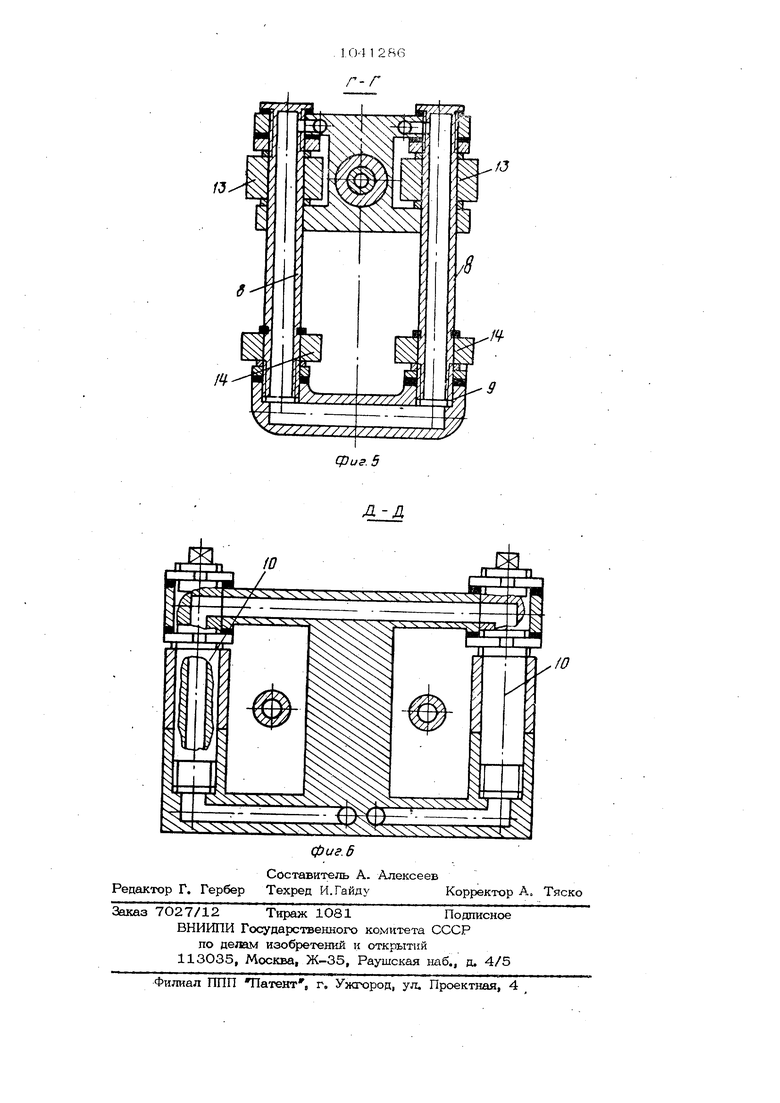
11 Изобретение оттгосится к машинсх тр- б нто и может быть использова ю при со здании автооператоров и промьпллега-гьж роботов. Известен схват манипулятора, содержащий корпус, двуплечие рычаги с губками и зажимными роликами, размещенными на разных концах этих рычагов, и привод с толкателем l . Недостатком известного схвата является низкая надежность при работе в горячих средах. Цель изобретения - повышение надеж ности работы схвата. Цель достигается тем, что схват ма нипулятора, содержащий корпус, двуплечие рычаги с губками и зажимными роликами, размещенными на разных концах этих рычагов, и пр1гоод с толкателями, снабжен двумя парами дополни те лы-иых роликов, размещенюзтми на толкателе, и разжимными роликами, закрепленными на двуплечих рычагах, при этом линии соединения центров зажимных и разжим}1ых роликов с центрами дополнительных роликов образуют угол 9О . Кроме роликов и двуплечих рычагов вьшолнены полыми, а в толкателе и корпусе выпо.гщены отверстия, свяаащ ые с полостями осей. Зажимные и разжимные ролики выполне11Ы бочкообразными. На фиг. 1 представлен- схват, вид спе реди; на фиг. 2 - сечение А-А на фиг. 1 на фиг. 3 - сечение Б-Б на фиг, 1, на фиг, 4 - разрез В-В на фиг, 1; на фиг. сечение Г-Г на фиг. 4 по верхним и ниж ним роликам толкателя; на фиг. 6 - сечение Д-Д на фиг. 1 по осям рычагов. Схват манипулятора содержит корпус I в пазу 2 которого установлен толк 1тель 3, закрепленный на щтоке 4 силового цилиндра 5; шток 4 состоит из двух цилиндрических трубок 6 и 7, жестко связанных между собой J в толкателе 3 жест ко закреплены полью оси 8, снизу жестко связанные между собой полой стяжкой 9. В корпусе 1 жестко закреплены полые оси 10, на которых сидят рычаги 11 с губками 12, вверху и внизу симметрично по отношешпо к осям 10 на осях 8 сидят верхние и нижние дополнителыпле ролики 13 и 14, а на рычагах 11 жестко закреплены верхние зажимные бочкооб .разные ролики 15 и нижпчв разжимные бочко образные ролики 16,причем бочкообразные ролики 15 и 16 установлены таким образом, что линии соедкнения их центтдав 6 с центром цилиндрических ро--ков 13 и 14 по каждой ветви: i : .. .11-- ось 8 образуют угоп 90 , Kopnvc 1 жестко спязап с силовьш цилиндром 5, элементы схЕата образуют два корпуса охлажцени: : подвижный, сс-стоящий из штока 4, образованного .трубками 6 и. 7, толкателя 3, в котором имеются отверстия, полых осей 8, полой стяжки 9; неподвижный, состоящ й из полых, осей 10 и корпуса 1 с отверстиями. Схват {работает следующим образом. Зажим . При подаче энергоносителя в левлто полость силового цишшдра 5 шток 4 начинает перемещаться вправо и т-янет толкатель 3, который перемешается в пазу 2 корпуса 1| вместе с толкателем 3 вправо перемещаются оси 8 с сидящими на них цигошдрическими .роликами 13 и 14, верхние зажимные цилиндрические ролики 13 катятся по верхним зажимяым бочкообразным роликам 15 и через последние заставляют рычаги 11 вращаться вокруг осей 10, при этом губки 12 зажимают деталь. Верхние зажимные бочкообраз.иые ролики 15 удаляются от оси симметрии схвата, а нижние разжимные бочкообразные ролики 16 приближаются к оси симметрии схвата. Так 1-:ак поперечные оси симметрии бочкообразных роликов 15 и 16 находятся на одном расстоянии от осей 1О, то удаление роликов 15 от оси симметрии схвата и приближение роликов 16 к оси симметрии схвата происходит на одну и ту же веш-гчину, зависящую от величины хода толкателя. Величина неремещ.ения роликов 13 и 14 вправо одинакова. При перемешении толкателя 3 вправо ролик 14 все время освобождает место для приближения ролика 16 к оси симметрии схвата Разжим детали. Энергоноситель подается в правую полость силового цилиндра 5, шток 4 начинает перемещаться влево и перемещает толк 1тель 3 с осями 8 и роликами 13 и 14 влево. При это:м ролики 13 отходят от роликов 15j а ролики 14 входят в контакт с роликами 16.начинают катиться по последним и через них заставляют рычаги 11 с губками 1.2 вращаться вокруг осей 10„ Охлаждение схвата. Для охлаждения корпуса 1, осей 10,, рыча:сх в 11 испо-льзз етс неподвилшый KOHiyp охлаждения. Схлпдкте.ть подается в OTtsepCTHe Е корпуса 1, далее по отверстия.. в корпусе .- : подводится к правой
оси 10, проходит ее, далее по отверотию в корпусе 1 к левой оси 10, проходит ее и по отверстиям в корпусе 1 поступает на выход к отверстию Ж.
Для охлаждения штока 4, толкателя 3, осей 8, стяжки 9, цилиндрических роликов 13 и 14 используется подвижный контур. Охладитель подается в отверсттю наружной трубы 7 штока 4, далее по отверстиям в толкателе 3 к левой оси 8, проходит внутри ее стяжки 9, проходит внутри правой оси 8, далее через отверстия в толкателе поступает в трубу 6 штока 4 и через отверстие К выходит наружу.
Изобретение повышает надежность работы схвата в условиях повышенной температуры.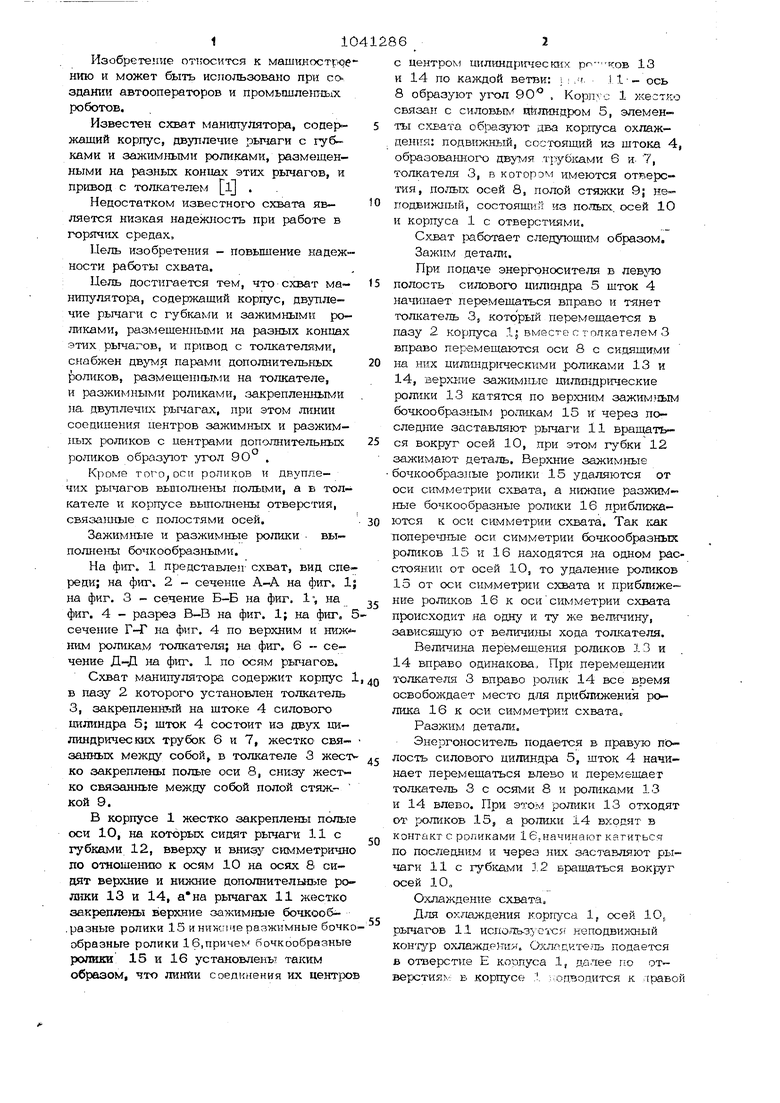
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Схват промышленного робота | 1984 |
|
SU1256956A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
1. ОХВАТ МАНИПУЛЯТОРА, содержащий корпус, двуплечие рычаги с губками и зажимными роликами, размещенными нараэнык концах этих рычагов,и привод с толкателем, отличающийся тем, что, с целью повышения надежности работы, он снабжен двумя парами дополнительных роликов, размещенными на толкателе, и розжимными роликами, закрепленными на двуплечих рычагах, при этом линии соединения центров зажимных и разжимных роликов с центрами дополнительных роликов образуют угол ЭО° . 2.Схват по п. 1, о т л и ч а ю- щ и и с я тем, что оси роликов и двуплечих рычагов выполнены полыми, а в толкателе и в корпусе вьшолнены отверстия, связанные с полостями осей роликов. 3.Схват по п. 1, о т л и ч а ю щ и и с я тем, что зажимные и разжимные ролики вьшолнены бочкообразными. «
Тд
(pus.i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватная головка манипулятора | 1979 |
|
SU770790A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
