Изобретение относится к машиностроению, а именно к схватам промышленных роботов.
Известен охват промышленного робота, содержащий ползун, установленный в пазу корпуса, серьги, связанные посредством осей с рычагами, несущими губки, сухарь и привод.
Недостатком -известного техничес.кого решения япляётся невозможность адаптации положения гувок по положению детали, поэтому необходимо, чтобы продольная ось схвата точно совпадала с осью симметрии детали, так как в противном случае конструкция схвата испытывает дополнительнью нагрузки, ведупше к износу или к поломке схвата.
Пель из&брвтения - повышение эксплуатационных характеристик за счет адаптации положения губок по положению детали.
Указанная цель достигается тем, . что схват промышленного робота содержит ползун, установленный в пазу корпуса, серьги, связанные посредст- врм осей с рычагами, несущими губки, суп харь и привод к снабжен плоской пружи-. но4,жестко соединенной с приводом тра-чверсой, связан ной с ползуном,в котором выполнен паз, причем сухарь и фикса-г тор расположены в этом пазу, а плоская пружина расположена между Фиксатором и траверсой.
На чертеже показан схват, разрез. Схват Промышленного робота содержит кротлтейн 1, в котором выполнен сквозной паз 2. С крототейном I. жестко связаны щеки 3, в которых на осях 4 установлены рычаги 5-8, которые при помощи осей соединены с губками 10 и 11, а рычаги 5 и 7 осями 12 связаны с серьгами 13 и 14, которые при ПСЯ4ОЩИ оси 15 соединены с сухарем 16, который установлен, в пазу ползуна 17 вместе с пластинчатой пружиной 18 и фиксатором 19, фиксатор 19 прижимает сухарь
16к ползуну 17 при помощи пластинчатой пружины 18, вставленной между Ликсатопом 19 и траверсо 20. Лолзу
17установлен в пазу 2 кронштейна 1. Траверса 20 жестко связана со
Гггоком 21, а кронштейн 1-е крьаякой 22 приводного 1хилиндра 23 схвата, который магистралями 24 и 25 связан с золотчиком 26. Упоры 27 жестко установлены в щеках 3.
Схваг работает следующим образом Деталь расположена симметрично относительно продольной оси схвата. При включении золотника 26 энергоноситель по магистрали 25 поступает в приводной 1и1линдр 23 схвата, в результате чего ttrroK 21 перемещается вверх и перемещает траверсу 20, которая воздействует на ползун 17
и заставляет его перемещаться вверх в i кронштейна 1. Вместе с ползуном 17 перемещается вверх пластинчатая пружина -18, фиксатор 19, сухар 16 и ось 15. Последняя давит на серьги 13 и 14, которью через оси 12 вращают рычаги 5 и 7 вокруг осей 4. Рычаги 5 и 7 через оси 9 воздействуют на губки 10 и 11, которые начинают сближаться и зажимают деталь.
Так как при работе схвата силы трения в цилиндрических шарнирах левой и правой ветви ptataroB не равны то для синхронного хода губок 10 и11 необходимо, чтобы перемещение сухаря 16 происходило под некоторьм усилили, для чего и служит пластинчатая пружина 18, прижимающая су. харь 16 через фиксатор 19 к ползуиу 17.
При переключении золотника 26 энергоноситель по магистрали 24 поступает в приводной цилиндр 23 схвата. WfcoK 21 перемещается вниз, перемещает вниз траверсу 20 и ось 15, Которая через серьги 13 и 14 воздействует на рычаги 5 и 7, а последние перемещают губки 10 и 11, которые начинают расходиться и разжимают деталь.
Губки 10 и 11 раходятся до тех itop, пока рычаги 5 и 7 не остановят упоры 27.
Деталь расположена не симметрично относительно продольной оси схвата.
Будем считать, что расстояние от губки 10 до детали меньше расстояния от губки 11 до детали, поэтому при зажиме детали губка 10 коснется детали, а между губкой 11 и деталью будет некоторое расстояние. Силового замыкания между губками lО и 11 не происходит, поэтому шток 21 с траверcoft 20,фиксатором 19 и пластинчатой Пружиной 18 перемещаются вверх, а сухарь 16 с осью 15 - вверх и вправо до тех пор, пока губка 11 не косштся детали.
При разжиме детали irrroK, 21 перемещает вниз кулису, сухарь 16 с сидя щей в нем осью 15 давит на серьги 13 и 14, которые заставляют вращаться рычаги 5-8 вокруг осей 4, а губки 10 и 11 при этом расходятся и разжимют деталь.
Так как губка 10 первой касается детгши, следовательно, рычаг 5 уходит от своего упора 27 на меньшее расстояние по сравнению с рычагом 7, совер1 л1В1т им большее перемещение, поэтому при разжиме детали и последующем движении сухаря 16 с осью 15 вниз рычаг 5, дойдя до упора 27, остановится и через ось 12 будет воздействовать на серьгу 14, которая вращается вокруг оси 12 и перемещает ось 15 с сухарем 16 влево. Сухарь
16 С осью is будет перемещаться влево до тех пор, пока рычаг 7 не остановит упор 27. Упоры 27 служат дпя возврашвмия губок 10 и 11 в исходное сзтметричное положение отнЕ ситеяьнр продольной оси схвата.
Использование предлагаемой конструкции по сравнению с конструкцией . базового объекта позволяет увеличить срок службы робота и обслуживаемого оборудования
так как ликвидированы нагрузки на конструкции робота и обслуживаемого оборудования, возникакхцие при зажиме схватом детали, ось симметрии которой не совпадает с продольной осью схвата, а также повысить производительность робототехнйческого комплвк са за счет сокращения времени ни обучение робота заданной программе, гак как отпадает, необходимость в гоч jk)M совмещении оси симметрии детали i: продольной осью схвата.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват промышленного робота | 1988 |
|
SU1516347A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Универсальный станок для закалки крупногабаритных деталей с индукционного нагрева | 1986 |
|
SU1435622A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват | 1982 |
|
SU1093543A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
СХВАТ ПРОММИЛЕННОГО РОБОТА, содержаний ползун, установленный в пазу корпуса, серьги, связанные посредством осей с рычагами, несущими . губки, сухарь и привод, о т л и ч аю щ и и с я тем, что, с. целью повышения эксплуатационных характеристик за счет адаптации положения губок по положению детали, он снабжен плос кой пружиной и жестко соединенной с приводе) траверсой, связанной с ползуном, в котором вьтолнен паз,,. причем сухарь и фиксатор расположены в этом пазу, а плоская пружина расположена между фиксатором и траверсой.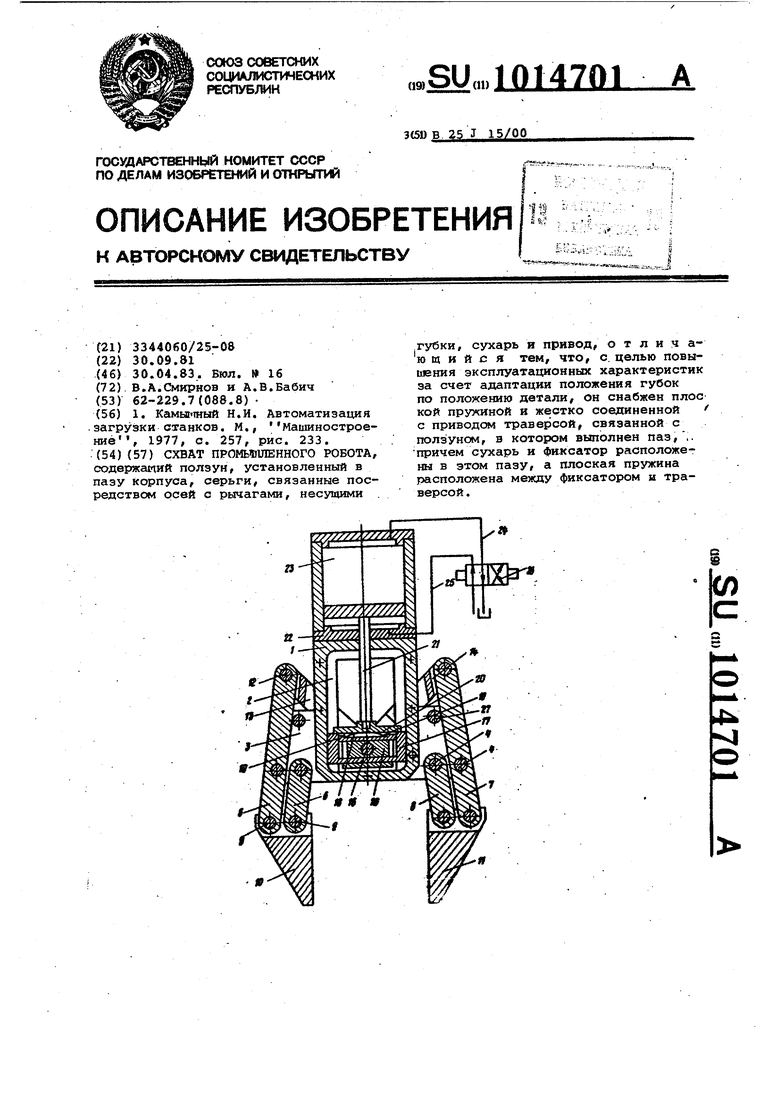
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Камычный Н.И | |||
| Автоматизация загрузки станков | |||
| М., Машиностроение, 1977, с | |||
| Аппарат для нагревания окружающей его воды | 1920 |
|
SU257A1 |
| Крутильный аппарат | 1922 |
|
SU233A1 |
