Изобретение относится к машиностроению и может быть использовано при создании нромышленных роботов и автооператоров.
Цель изобретения - повышение точности центрирования за счет самоустановки зажимных губок.
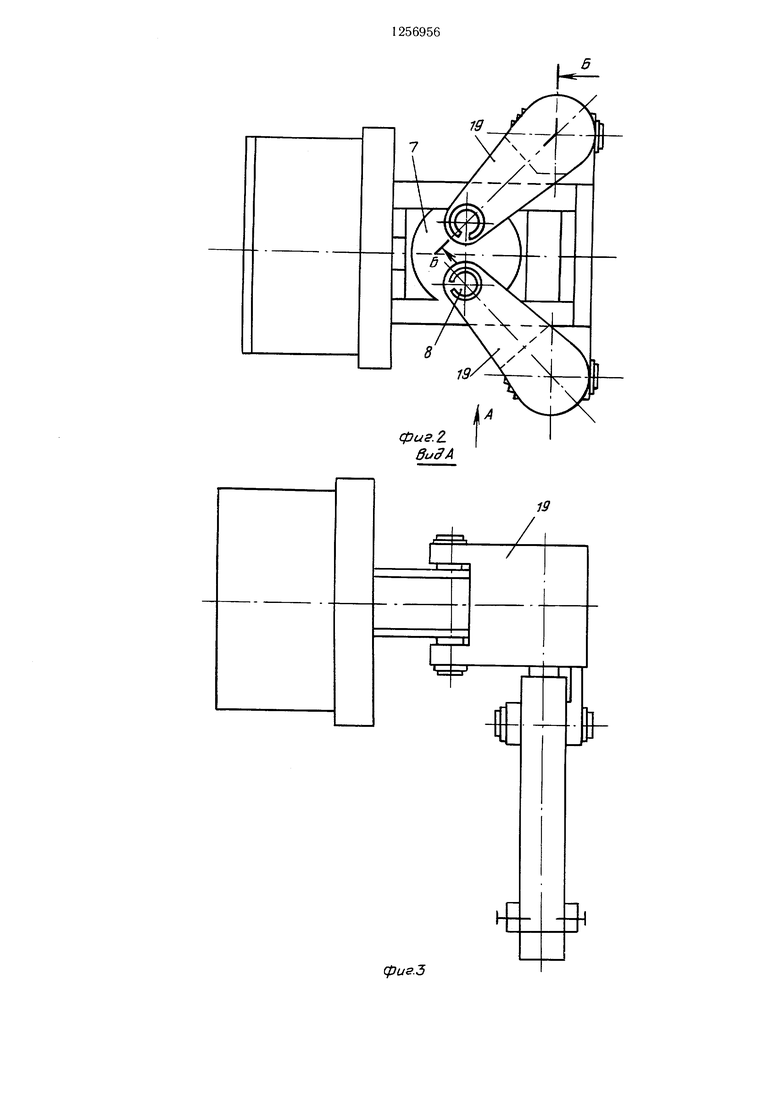
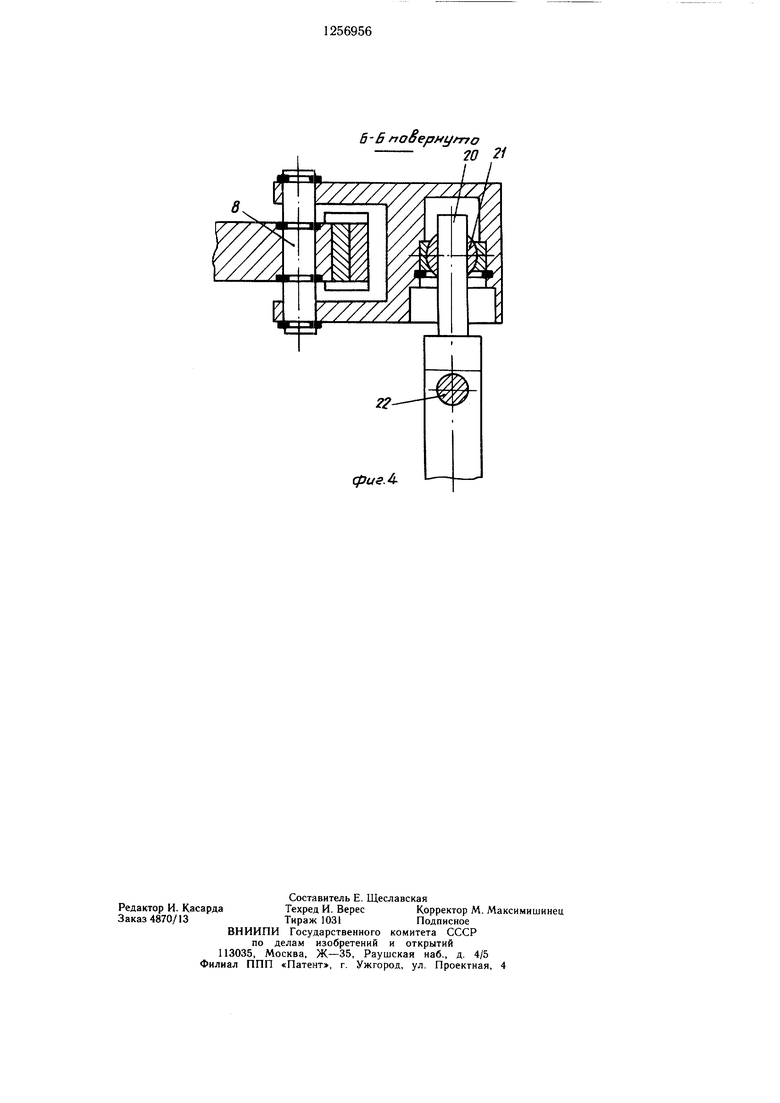
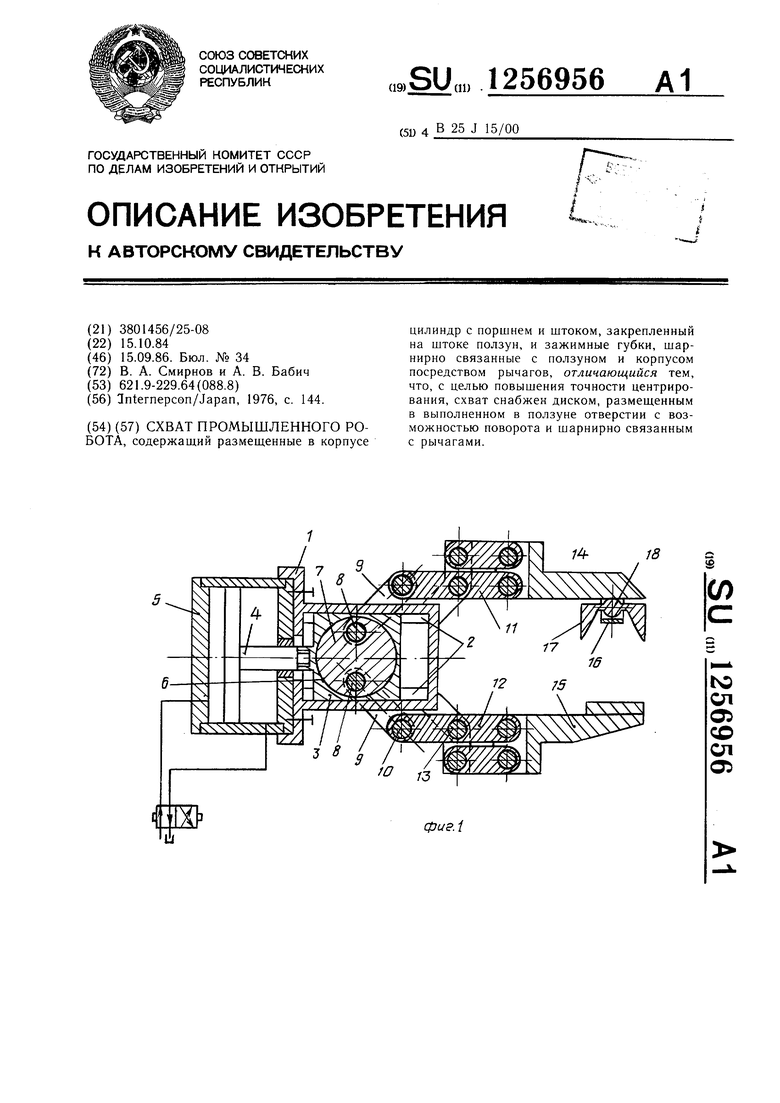
На фиг. 1 представлен схват, разрез, губки перемеш.аются в одной плоскости с продольной осью цилиндра; на фиг. 2 - схват, губки которого перемещаются в плоскости, перпендикулярной плоскости, в которой лежит продольная ось цилиндра; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2.
Схват промышленного робота, губки которого перемещаются в одной плоскости с продольной осью цилиндра, содержит корпус 1, в пазу 2 которого перемещается ползун 3, жестко связанный со штоком 4 цилиндра 5. В ползуне 3 выполнено цилиндрическое отверстие 6, в котором сидит диск 7 с установленными в нем осями 8, которые рычагами 9 через оси 10 связаны с рычагами 11 и 12, установленными в корпусе 1 на осях 13, рычаги 11 и 12 связаны с рычагами 14 и 15. Губка 15 выполнена плоской,
10
15
20
и 15 не совпадает с осью симметрии детали. При этом плоский рычаг 15 или плоский конец рычага 21 вошли в соприкосновение с деталью, а между призмой 17 и деталью имеется зазор, т. е. рычаг 15 или плоскооформленный конец рычага 21 стоят на листе, а так как ползун 3 перемещается вправо, то рычаг 9 или толкатель 19 через ось 8 воздействуют на диск 7, который начинает поворачиваться в направлении часовой стрелки, при этом вместе с диском 7 вращается вторая ось 8, а второй рычаг 9 или второй толкатель 19 воздействует на рычаг II или 21, в результате чего призма 17 входит в соприкосновение с деталью, т. е. за счет поворота диска 7 с осями 8 в ползуне 3 происходит компенсация несоосности продольной оси симметрии схвата и оси симметрии детали.
При разжиме схвата, за счет изготовления левой и правой половин схвата симметричными, оси 8, установленные в диске 7, устанавливаются перпендикулярно направлению вращения диска 7. При этом диск 7 поворачивается против часовой стрелки.
Происходит зажим детали. Поперечная ось схвата или ось симметрии призмы 17
а на рычаге 14 жестко установлена скоба 16, 25 не совпадает с осью детали. Например, ось
в которой помещена призма 17, па противоположных сторонах которой выполнены радиусные гребни 18. Причем радиус обоих гребней проведен из одной точки, у схвата (фиг. 4). С осями 8 связаны толкатели 19, в которых установлены шарнирные подшипники 20, установленные на рычагах 21, сидящие на осях 22 в корпусе. Концы рычагов выполнены так же как и рычаги 14 и 15.
Схват работает следующим образом.
При поступлении энергоносителя в бес30
симметрии призмы лежит ближе к корпусу 1, нежели ось детали. В таком случае правая или нижняя грань призмы 17 входит в соприкосновение с деталью и поворачивается вокруг центра радиусных гребней 18, перемещается вниз до тех пор, пока левая или верхняя грань призмы 17 не входит в соприкосновение с деталью. При этом, если ось детали не перпендикулярна продольной оси схвата, то призма 17 соверщает вращательное движение относительно поперечной оси
щтоковую область цилиндра 5, шток 4 пере- 35 схвата. Грани призмы 17 становятся параллельными оси детали. Таким образом, схват компенсирует несоосность схвата и детали в трех плоскостях, относительно трех осей. Применение предлагаемой конструкции Q схвата по сравнению с известной конструкцией позволяет увеличить срок службы робота и обслуживаемого оборудования за счет ликвидации нагрузок на конструкции робота и обслуживаемого оборудования, возникающих при зажиме схватом детали, вызываюмещается вправо и перемещает вправо ползун 3 с диском 7 и осями 8. Последние через рычаги 9 оси 10 поворачивают рычаги 11 и 12 вокруг осей 13. При этом рычаги 14 и 15 сближаются и замыкают деталь. При поступлении энергоносителя в штоковую полость цилиндра 5 ползун перемещается влево и происходит разжим цилиндрической детали, т. е. рычаги 14 и 15 расходятся. У схвата (фиг. 4) при перемещении ползуна 3 с диском 7 вправо толкатели 19 через 45 щих их износ и поломки; уменьшения работы
шарнирные подшипники 20 воздействуют на рычаги 21. Последние поворачиваются вокруг осей 22 и зажимают деталь.
Если оси схвата и оси детали не будут совпадать, то работа схвата осуществляется следующим образом.
Происходит зажим детали. Продольная ось симметрии рычагов 21 или рычагов 14
50
степеней подвижности, так как не нужно точно совмещать оси детали и схвата; повысить производительность робототехнического комплекса за счет сокращения времени на обучение робота заданной программе, так как оси схвата и детали не нужно точно совмещать; за счет сокращения времени, необходимого на выполнение заданного цикла движений роботом.
0
5
0
и 15 не совпадает с осью симметрии детали. При этом плоский рычаг 15 или плоский конец рычага 21 вошли в соприкосновение с деталью, а между призмой 17 и деталью имеется зазор, т. е. рычаг 15 или плоскооформленный конец рычага 21 стоят на листе, а так как ползун 3 перемещается вправо, то рычаг 9 или толкатель 19 через ось 8 воздействуют на диск 7, который начинает поворачиваться в направлении часовой стрелки, при этом вместе с диском 7 вращается вторая ось 8, а второй рычаг 9 или второй толкатель 19 воздействует на рычаг II или 21, в результате чего призма 17 входит в соприкосновение с деталью, т. е. за счет поворота диска 7 с осями 8 в ползуне 3 происходит компенсация несоосности продольной оси симметрии схвата и оси симметрии детали.
При разжиме схвата, за счет изготовления левой и правой половин схвата симметричными, оси 8, установленные в диске 7, устанавливаются перпендикулярно направлению вращения диска 7. При этом диск 7 поворачивается против часовой стрелки.
Происходит зажим детали. Поперечная ось схвата или ось симметрии призмы 17
5 не совпадает с осью детали. Например, ось
не совпадает с осью детали. Например, ось
симметрии призмы лежит ближе к корпусу 1, нежели ось детали. В таком случае правая или нижняя грань призмы 17 входит в соприкосновение с деталью и поворачивается вокруг центра радиусных гребней 18, перемещается вниз до тех пор, пока левая или верхняя грань призмы 17 не входит в соприкосновение с деталью. При этом, если ось детали не перпендикулярна продольной оси схвата, то призма 17 соверщает вращательное движение относительно поперечной оси
схвата. Грани призмы 17 становятся параллельными оси детали. Таким образом, схват компенсирует несоосность схвата и детали в трех плоскостях, относительно трех осей. Применение предлагаемой конструкции схвата по сравнению с известной конструкцией позволяет увеличить срок службы робота и обслуживаемого оборудования за счет ликвидации нагрузок на конструкции робота и обслуживаемого оборудования, возникающих при зажиме схватом детали, вызываю
степеней подвижности, так как не нужно точно совмещать оси детали и схвата; повысить производительность робототехнического комплекса за счет сокращения времени на обучение робота заданной программе, так как оси схвата и детали не нужно точно совмещать; за счет сокращения времени, необходимого на выполнение заданного цикла движений роботом.
фиг. 2. виЗА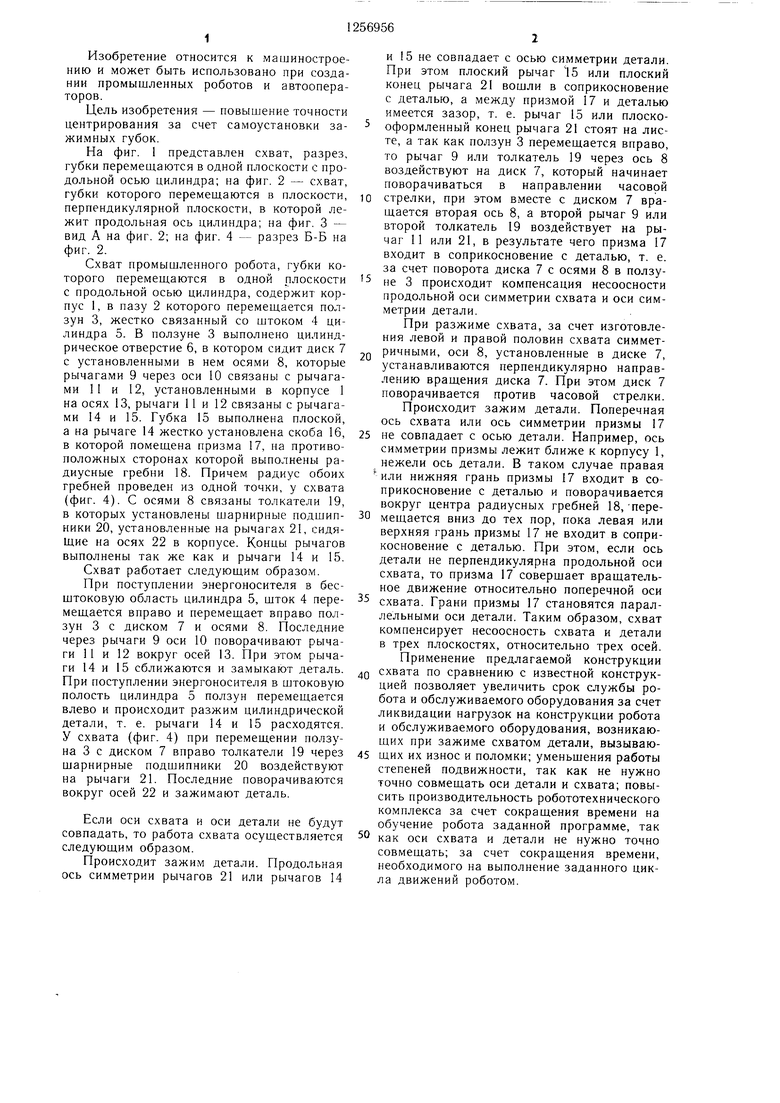
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Схват манипулятора | 1982 |
|
SU1041286A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват | 1977 |
|
SU659377A1 |
| Схват промышленного робота | 1988 |
|
SU1516347A1 |
(риг.З
б-В повернуто W 21
(риеЛ
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
