1
Изобретение относится к оборудованию для подъема, перемещения и опускания грузов и может быть использовано в лесозаготовительной промышленности.
Цель изобретения - расширение зоны обслуживания.
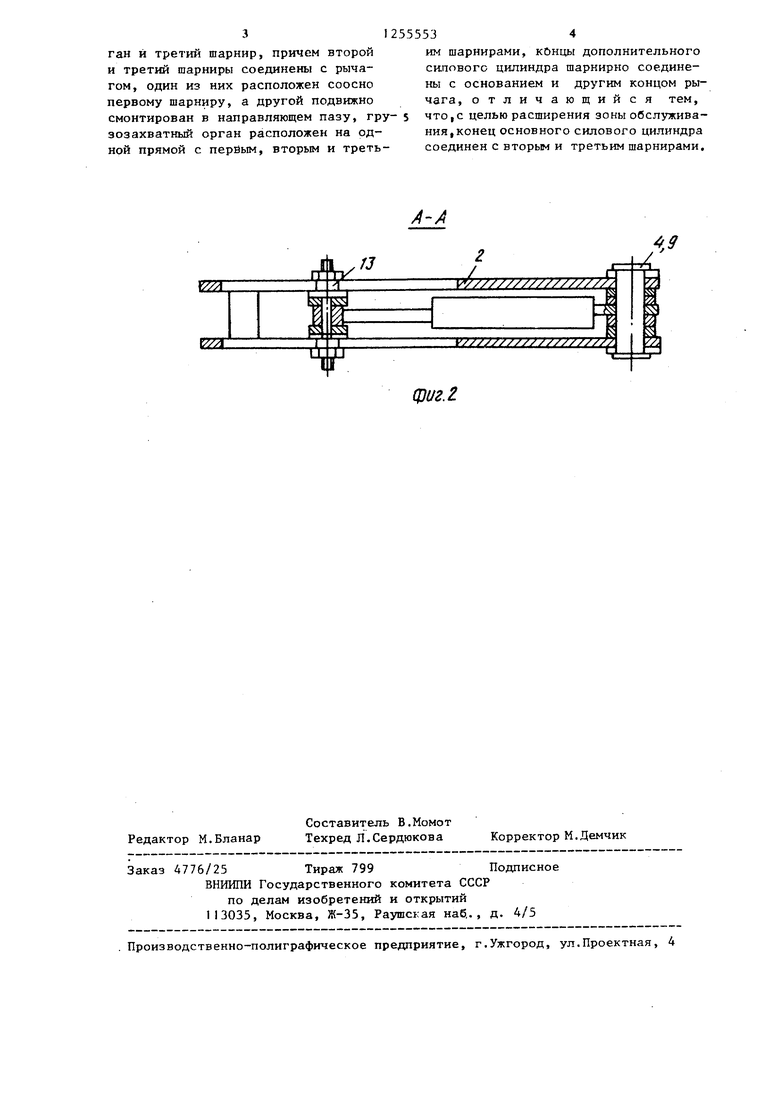
На фиг. изображена кинематическая схема манипулятора; на фиг.2 сечение А-А на фиг,1.
I
Манипулятор для лесных грузов состоит из основания 1, рычага 2 с направляющим пазом 3, посредством шарнира 4 закрепленного одним концом на основании 1, шарнирно соеди- -ненных одними концами стрелы 5 и, ;рукояти 6, тяг 7 и 8., закрепленных
одними концами с помощью шарнира 9 между 20 грузу по прямой линии, проходящей
собой, а другими - шарнирко к средним частям стрелы 5 и рукояти 6 и образующих с ними параллелограмм, основного 10 и дополнительного П силовых цилиндров поворота стрелы и рукояти в вертикальной плоскости, смонтированных на других концах рукояти и стрелы соответственно грузозахватного органа 12 и шарнира 13, а также, системы.гидропитания. Шарниры 9 и 13 соединены с рычагом так, что один из них, например, шарнир 9 (фиг.1) расположен соосно шарниру 4 а другой, например 13 подвижно смонтирован в пазу. Грузозахватный орган 12 расположен на одной прямой с щар- ниром 9 и 13. Концы цилиндра П шарнирно соединены с основанием 1 и другим концом рычага 2, а концы цилиндра 10 соединены с шарнирами 9 и 13.
Система гидропитания содержит на- сое 14, включенные параллехгьно ду собой основной 15 и дополнительный 16 распределители,, входа которых с помощью трубопроводов 17 и 18 подключены к насосу 14, а вых.оды посредством трубопроводов 19 и 20 - к сливу, а также трубопроводы 21-24 дл подачи рабочей жидкости от распределителей 15 и 16 к OCHOBHONry 10 и дополнительному 11 силовым цилиндрам.
Параметры кинематической схемы устройства целесообразно подбирать с соблюденушм следующих соотнощений ВС CD EF, BE EG,, FD FG.
2Ь55531
Манипулятор для лесных грузов работает следующим образом.
Перед началом работы манипулятора рабочая жидкость под давлением
5 посредством включения насоса 14 по трубопроводам 17 и 8 подается соответственно к распределителям 15 и 16. Для подачи закрепленного на конце рукояти 6 захватного органа 12 к грузу включением распределителя 16 захватный орган 12 нацеливается на груз, а затем включается распределитель 15 так, что рабочая жидкость по трубопроводу 24 поступает в бес 5 штоковую полость цилиндра 10. При этом выдвигающийся щток цилиндра 10 перемещает по прямолинейному пазу 3 шарнир 13 стрелы 5, что приводит к пе- перемещению захватного органа 12 к
10
через ось шарнира 4.
После захвата груза для его переноса, например, к основанию 1 манипулятора, включается распределитель 15 так, что рабочая жидкость по трубопроводу 23 поступает в штоковую полость гидроцилиндра 10. При зтом втягивающийся шток цилиндра 10 перемещает по прямолинейному пазу 3 шарнир 13 стрелы 5, что приводит к перемещению захватного органа 12 по прямой линии, проходящей через ось опорного шарнира 4, затем отключается распределитель 15 и включается распределитель 16 для подачи рабочей жидкости н щтоковую или бесштоковую полости цилиндра 11. При этом груз, нахо- д 1щнйся в захватном органе 12, перемещается по дуге окружности.
Формула изобретения
Манипулятор преимущественно для лесных грузов, содержащий рычаг с направляющим пазом, посредством первого щарнира закрепленный одним концом на основании, шарнирно соединенные между собой одними концами стрелу и рукоять, пару тяг, закрепленных одними концами посредством второго щарнира между собой, а другими - шарнирно к средним частям последних и образующих с ними параллелограмм, основной и дополнительный силовые цилиндры поворота стрелы и рукояти в вертикальной плоскости, смонтирован- . ные на других концах рукояти и стрелы соответственно грузозахватный орган и третий шарнир, причем второй и третий шарниры соединены с рычагом, один из них расположен соосно первому шарниру, а другой подвижно смонтирован в направляющем пазу, гру- зозахватный орган расположен на одной прямой с перйым, вторым и треть
им шарнирами, концы дополнительного сипового цилиндра шарнирно соединены с основанием и другим концом рычага, отличающийся тем, что,с целью расширения зоны обслуживания, конец основного силового цилиндра соединен с вторым и третьим шарнирами.
/
Еа
Г
Редактор М.Бланар
Составитель В.Момот Техред Л.Сердюкова
Заказ 4776/25 Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,. , д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
ф{/г.2
Корректор М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| Лесозаготовительная машина | 1980 |
|
SU935004A1 |
| Грузозахватное устройство | 1990 |
|
SU1712300A1 |
| Грузоподъемное устройство | 1985 |
|
SU1312060A2 |
| Манипулятор | 1985 |
|
SU1341015A1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2003 |
|
RU2231494C1 |
Изобретение относится к оборудованию для подъема, перемещения и опускания грузов и может быть использовано в лесозаготовительной промьшленности. Цель изобретения - расширение зоны обслуживания. Манипулятор состоит из основания 1, стрелы 5, руколти 6,(тяг 7 и 8, силовых цилиндров 10 и 11 поворота стрелы и рукояти в вертикальной плоскости и грузозахватньй орган 12. При включении силового цилиндра 10 шарнирный параллелограмм, состоящий из стрелы 5, рукояти 6, тяг 7 и 8, изменяет конфигурацию, вследствие чего грузозахватный орган 12 перемещается по прямой линии, проходящей через шарниры 4, 9, 13. При включении силового цилиндра 1 весь механизм, состоящий из рычага 2, указанного параллелограмма и грузозахватного органа 12, поворачивается вокруг шар- шарниров 4 и 9. 2 ил. о S (Л
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
