Изобретение относится к телеуправлению подвижными объектами и может быть применено на рельсовом транспорте.
Целью изобретения является упро- щение и уменьшение погрешности изме- рителя скорости подвижного объекта.
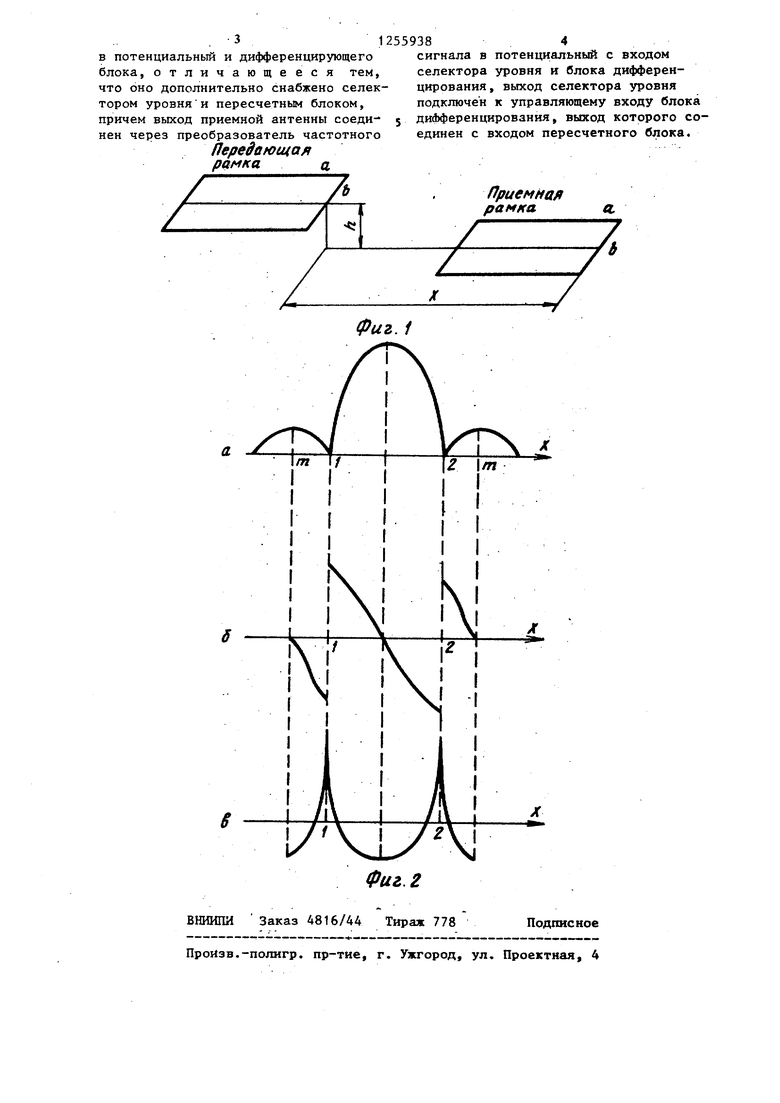
На фиг. 1 представлено взаимное расположение передающей и приемной рамке; на фиг. 2 - характер сигналов в измерительном канале; на фиг. 3 - блок-схема возможной реализации измерителя скорости.
Последовательность операций способа поясняется фиг. 2, где на фиг. 2 (а) представлены формы огибающей Е ЭДС, наводимой в приемной антенне, на фиг. 2 (б) - первой производной от огибающей Е и на фиг. 2(в) второй производной от огибающей Е ка -функции расстояния х для некоторого значения h. Как следует из фиг. 2, длина отрезка х,. при фиксированном h зависит только от геометрических размеров рамочных антенн, а ско- рость движения подвижной единицы равна
V S..,
где (. - интервал времени между поступлениями характерных максимумов второй производной огибающей / Е/.
Как видно из приведенного соотношения точность определения v зависит только от геометрических размеров а, Ь, h, точности измерения интервала времени и не зависит от разброса величины /Е/ для различных подвижных единиц, вызванных неста- бильностями токов в антеннах и другими причинами. Геометрические размеры а, Ь. h могут быть соблюдены с высокой степенью точности (доли процента) , а,погрешность измерения с учетом формы максимумов Е (практически дельта-функция) и нестабильности датчика временных интервалов (кварцевый генератор) может быть сведена к сотым долям процента.
Устройство (фиг. 3) содержит генератор 1 возбуждения с передающей рамочной антенной 2, индуктивного канала связи, приемную рамочную антенну 3, подключенную к измерительному каналу 4, вьтолненному на преобразователе частотного сигнала в потенциальный селектор 5 уровня, блок
5 0 5
0
5
0
5
0
5
6 дифференцирования и пересчетньгй блбк 7, при этом выход приемной антенны 3 соединен с входом измерительного канала , выход которого подключен к селектору 5 уровня и блоку 6 дифференцирования, причем выход селектора уровня воздействует на управляющий вход блока дифференцирования , выход которого подключен к пересчетному блоку 7.
Устройство, реализующее предлага- емьм способ, работает следующим образом.
При перемещении подвижного объекта в приемной антенне 3 наводится ЭДС. Частотный сигнал в измерительном канале 4 преобразуется в потенциальный. Когда величина сигнала достигает максимального уровня в первом лепестке совместной диаграммы направленности антенн. Точка m (фиг. 2) срабатывает селектор 5 уровня и запускает блок 6 дифференцирования. В блоке дифференцирования определяются максимумы второй производной огибающей частотного сигнала. В моменты появления Максимумов второй производной блок дифференцирования воздействует на пересчетный блок 1, который измеряет временной интервал между максимумами второй производной и затем пересчитывает его в значение скорости подвижного объекта.
Формула изобретения
1.Способ измерения скорости подвижного объекта, заключающийся в возбуждении приемной рамочной антенны частотным сигналом, преобразова- . НИИ частотного сигнала в потенци- альньй, выделении временного интервала, характеризующего скорость ; : объекта, и вычислении по полученному временному интервалу скорости объекта, отличающийся тем, что, с целью упрощения и уменьшения погрешности, временной интервал, характеризующий скорость объекта, выделяют по максимумам второй.произ- водной сигнала приемной рамочной антенны.
2.Устройство для измерения скорости подвижного объекта, содержащее генератор возбуяадения с передающей антенной и измерительный канал, состоящий из приемной рамочной антенны, преобразователя частотного сигнала
.3 1
в потенциальный и дифференцирующего блока, отличающееся тем, что оно дополнительно снабжено селектором уровня и пересчетным блоком, причем выход приемной антенны соединен через преобразователь частотного
Передоющая рамкаа.
2559384
сигнала в потенциальный с входом селектора уровня и блока дифференцирования , выход селектора уровня подключен к управляющему входу блока J дифференцирования, выход которого соединен с входом пересчетного блока.
Фиг. 1
Фиг, г
ВНИИПИ Заказ 4816/44 Тираж 778 Подписное Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4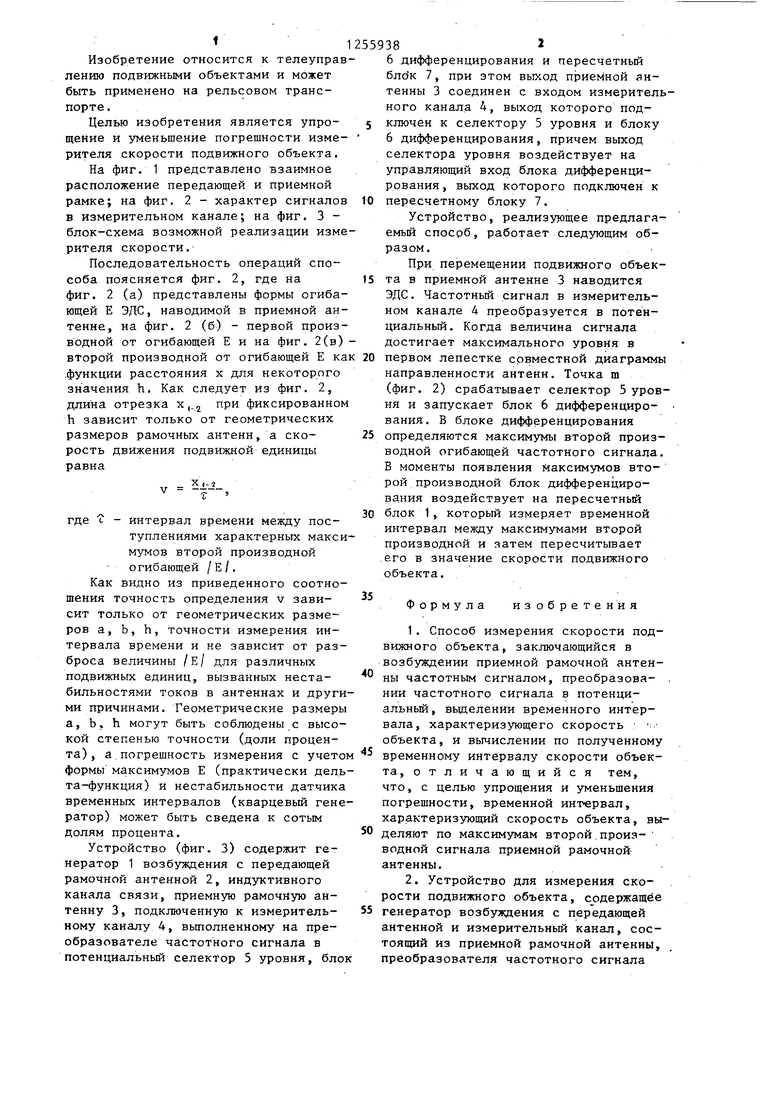
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости подвижного объекта | 1987 |
|
SU1493954A2 |
| Устройство для измерения скорости подвижного объекта | 1988 |
|
SU1594430A2 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Способ телеуправления подвижным объектом | 1979 |
|
SU877595A1 |
| Устройство для телеуправления подвижным объектом | 1979 |
|
SU783829A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| Устройство телеуправления подвижнымОб'ЕКТОМ | 1979 |
|
SU842909A1 |
| Устройство для определения положения устройства в пространстве относительно аналогичного устройства | 2018 |
|
RU2677083C1 |
| Устройство для контроля перемещения и местоположения транспортного средства | 1982 |
|
SU1237532A1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
Изобретение относится к телеуправлению подвижными объектами и может быть использовано в рельсовом Фи.З транспорте. Цель изобретения - упрощение и уменьшение погрешности измерения скорости. При перемещении подвижного объекта в приемной антенне 3 наводится ЭДС. Частотный сигнал в измерительном канале 4 преобразуется в потенциальньй. Срабатывает селектор 5 уровня и запускает блок 6 дифференцирования, в котором определяются максимумы второй производной огибающей частотного сигнала. В момент появления максимумов второй производной блок 6 дифференцирования воздействует на пересчетный блок 1 , который измеряет временной интервал между максимумами второй производной, и затем пересчитывает его в значение скорости подвижного объекта. 2 с.п. ф-лы, 3 ил. с (Л Ы СП СП СО 00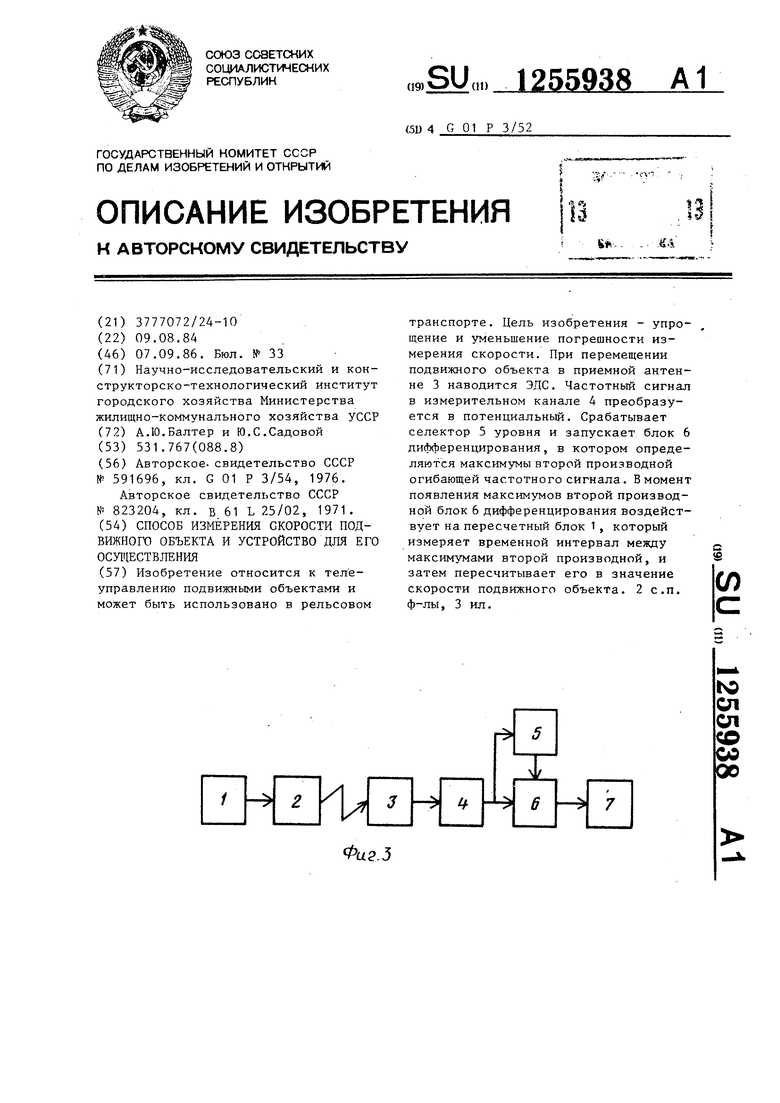
| Авторское, свидетельство СССР № 591696, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
