Изобретение относится к грузозахватным устройствам.
Цель изобретения - упрощение конструкции и повышение надежности работы устройства.
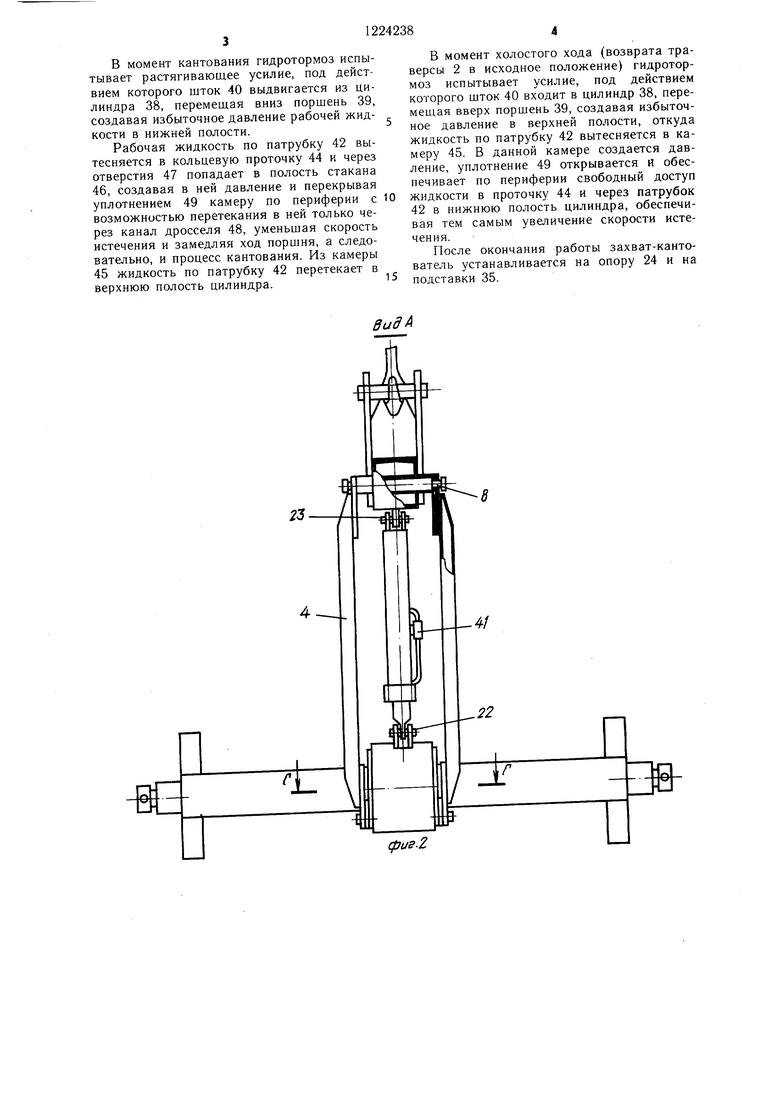
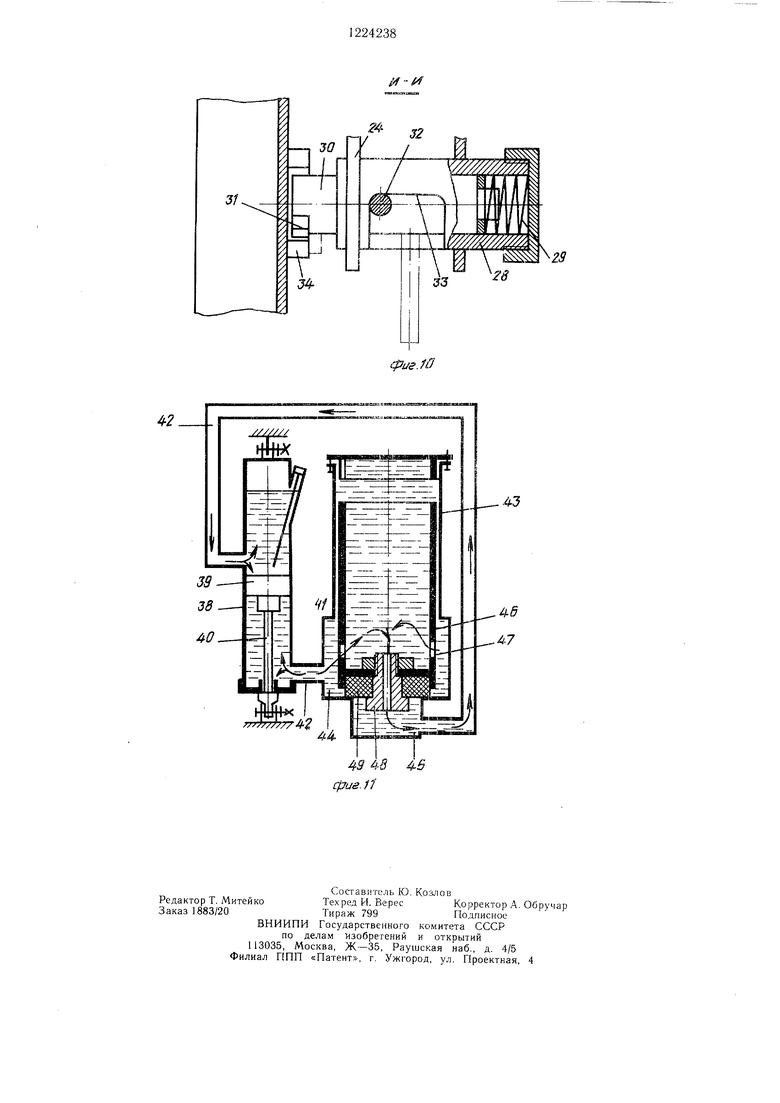
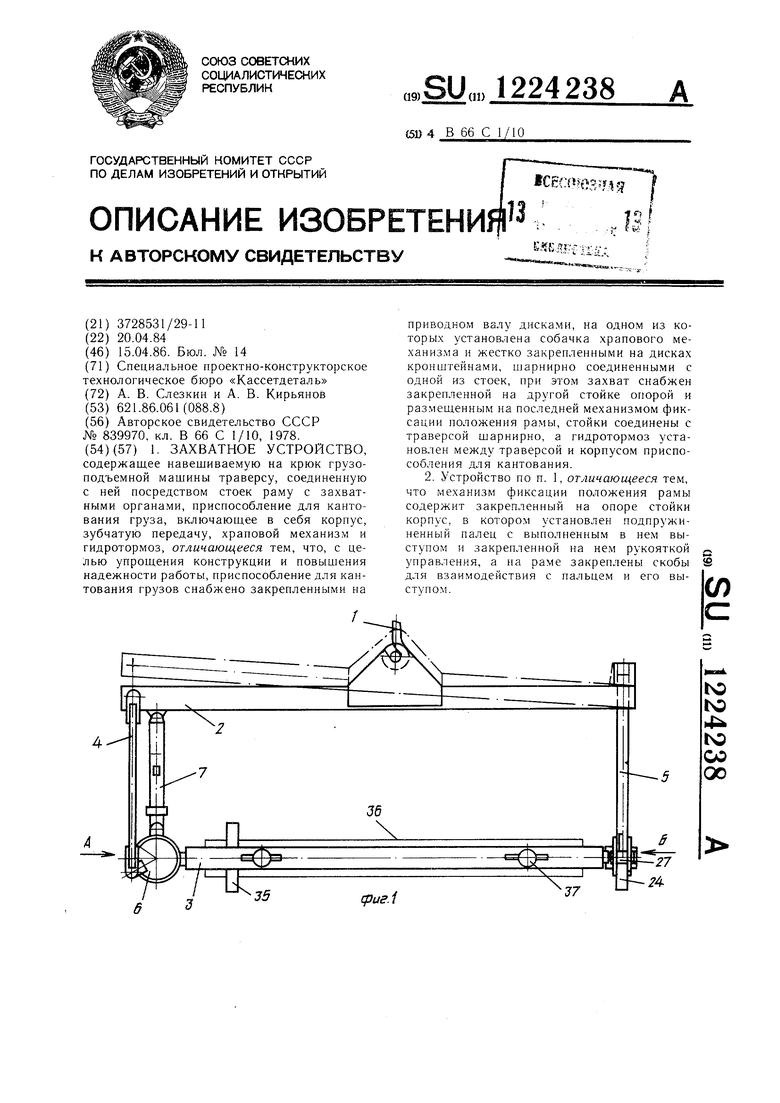
На фиг. 1 показан захват-кантователь, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 2 (механизм кантования); на фиг. 6 - вид Д на фиг. 5; на фиг. 7 - раз- Ю рез Е-Е на фиг. 5; на фиг. 8 - разрез Ж-Ж на фиг. 3, (механизм фиксации рамы); на фиг. 9 - разрез 3-3 на фиг. 8; на фиг. 10 - разрез И-И на фиг. 8 (механизм фиксации рамы); на фиг. 11 - схема . гидротормоза в момент рабочего хода. Захват-кантователь содержит навешиваемую на крюк 1 грузоподъемного устройства траверсу 2, связанную с рамой 3 посредством стоек 4 и 5, механизм 6 кантования и гидротор.моз 7.20
Траверса 2 через оси 8 и 9 шарнирно соединена со стойками 4 и 5. Стойка 4 шарнирно соединена с рамой 3 через механизм 6 кантования, который состоит из корпуса 10 и боковых подвижных дисков И, связанных
моз 7 снабжен регуляторо.м скорости 41 и соединен с ним патрубками 42.
Регулятор скорости 41 состоит из корпуса 43, выполненного с кольцевой проточкой 44 н полостью 45, и перемещающегося в нем стакана 46, имеющего боковые отверстия 47. В нижней части стакана 46 установлен дроссель 48 и уплотнение 49.
Захват-кантователь работает следующим образом.
Раму 3 подводят к плите 36, находящейся в горизонтальном положении, которую закрепляют на раме при помощи винтовых грузовых пальцев 37, вставляемых в технологические отверстия плиты.
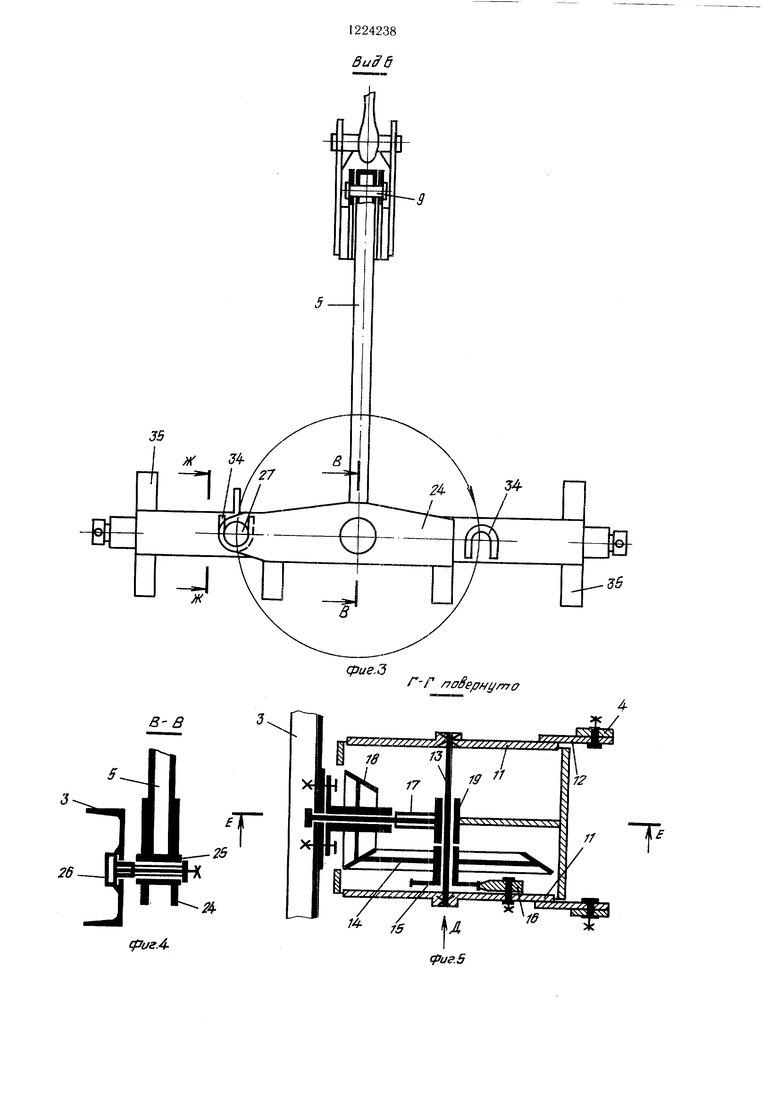
Перед подъемом панели 36 для осуществления процесса кантования размыкают фиксатор 27, для чего палец 30 вручную за рукоятку 32 управления выводят из зацепления со скобой 34., при этом выступ 31 занимает горизонтальное положение, упираясь под действие.м пружины 29 в торцовую поверхность скобы 34.
При подъеме плиты часть нагрузки от ее массы передается на стойку 4, которая через кронштейны 12 и диски 11 передает усилие на собачку 16. Последняя, входя в зацепсо стойкой 4 через кронштейны 12, причем 2- ление с храповым колесом 15, передает крутящий момент на коническое зубчатое колесо 14 и коническую ведомую шестерню 18, вызревая поворот рамы 3 вокруг продольной оси.
30
диски жестко закреплены на приводном валу 13, на котором свободно посажено ведущее коническое колесо 14, выполненное совместно с храповым колесом 15, взаимодействующим с собачкой 16, жестко закрепленной на одном из дисков 11. В корпусе 10 установлена ось 17, одним концо.м пропущенная через закрепленную на раме 3 коническую ведомую шестерню 18, а другим концом жестко закрепленная на подшипнике 19 вала 13. Корпус 10 закреплен на подшип- -,- нике 19 через ребро 20, имеющее проушину 21, соединенную осью 22 с гидротормозом, который установлен между механизлюм 6 кантования и траверсой 2 и прикреплен к ней с помощью оси 23.
тящий момент на коническое зубчатое колесо 14 и коническую ведомую шестерню 18, вызревая поворот рамы 3 вокруг продольной оси.
Полный угол поворота зубчатого колеса 14 составляет 60°, что при соответствующем передаточном отношении обеспечивает поворот рамы 3 с закрепленной в ней панелью на угол 180°.
Процесс кантования прекращается под действием фиксатора 27, палец 30 которого, взведенный перед подъемом при повора и,- вании рамы 3, соскальзывает выступом 31 с одной из скоб 34 и под действием пружины 29 выводится из корпуса 28 в первоначальна стойке 5 неподвижно закреплена опо- 40 ное положение, ра 24 с подщипником 25, через которыйВ конце кантования палец 30 начинает
пропущена ось 26, консольно закрепленная входить в створ смежной скобы 34 (рас- на раме 3. На опоре 24 смонтирован фикса- положенной на другой стороне рамы), упи- тор 27 рамы 3, содержащий корпус 28, за- раясь при этом в нее выступом 31 и поворачи- крепленный на опоре 24. В корпус е 28 под- 45 ваясь в исходное положение. Войдя в зацеп- вижно установлен поджимаемый пружиной
29 палец 30, выполненный с выступом 31
и рукояткой 32 управления, перемещаемой в
пазу 33 корпуса. Причем палец 30 и его
Выступ 31 взаимодействуют со скобами 34,
ление с данной скобой 34, палец 31 останавливает вращение рамы 3.
Перекантованная в процессе транспортировки панель устанавливается на твердое
закрепленными на торце рамы 3. Послед- 50 основание. При этом траверса 2 под дейстняя снабжена подставками 35, установленными на ней с возможностью поворота вокруг горизонтальной оси.
Для крепления кантуемой плиты 36 в раме имеются грузовые пальцы 37.
вием собственного веса возвращается в горизонтальное положение, нажимая на стойку 4, которая через кронштейн 12 поворачивает диски 11 в исходное положение. При этом собачка 16, выходя из зацепления с храпоГидротормоз 7, шарнирно соединенный с вым колесо.м 14 также возвращается в ис- траверсой, содержит гидроцилиндр 38 с порш- ходное положение, нем 39 на штоке 40, подвижно соединенным с механизмом кантования. ГидроторПроцесс кантования управляется посредством гидротормоза.
моз 7 снабжен регуляторо.м скорости 41 и соединен с ним патрубками 42.
Регулятор скорости 41 состоит из корпуса 43, выполненного с кольцевой проточкой 44 н полостью 45, и перемещающегося в нем стакана 46, имеющего боковые отверстия 47. В нижней части стакана 46 установлен дроссель 48 и уплотнение 49.
Захват-кантователь работает следующим образом.
Раму 3 подводят к плите 36, находящейся в горизонтальном положении, которую закрепляют на раме при помощи винтовых грузовых пальцев 37, вставляемых в технологические отверстия плиты.
Перед подъемом панели 36 для осуществления процесса кантования размыкают фиксатор 27, для чего палец 30 вручную за рукоятку 32 управления выводят из зацепления со скобой 34., при этом выступ 31 занимает горизонтальное положение, упираясь под действие.м пружины 29 в торцовую поверхность скобы 34.
При подъеме плиты часть нагрузки от ее массы передается на стойку 4, которая через кронштейны 12 и диски 11 передает усилие на собачку 16. Последняя, входя в зацеп ление с храповым колесом 15, передает круление с храповым колесом 15, передает кру
тящий момент на коническое зубчатое колесо 14 и коническую ведомую шестерню 18, вызревая поворот рамы 3 вокруг продольной оси.
Полный угол поворота зубчатого колеса 14 составляет 60°, что при соответствующем передаточном отношении обеспечивает поворот рамы 3 с закрепленной в ней панелью на угол 180°.
входить в створ смежной скобы 34 (рас- положенной на другой стороне рамы), упи- раясь при этом в нее выступом 31 и поворачи- ваясь в исходное положение. Войдя в зацеп-
ление с данной скобой 34, палец 31 останавливает вращение рамы 3.
Перекантованная в процессе транспортировки панель устанавливается на твердое
основание. При этом траверса 2 под дейстоснование. При этом траверса 2 под действием собственного веса возвращается в горизонтальное положение, нажимая на стойку 4, которая через кронштейн 12 поворачивает диски 11 в исходное положение. При этом собачка 16, выходя из зацепления с храповым колесо.м 14 также возвращается в ис- ходное положение,
вым колесо.м 14 также возвращается в ис- ходное положение,
Процесс кантования управляется посредством гидротормоза.
В момент кантования гидротормоз испытывает растягивающее усилие, под действием которого шток 40 выдвигается из цилиндра 38, перемещая вниз порщень 39, создавая избыточное давление рабочей жидкости в нижней полости.
Рабочая жидкость по патрубку 42 вытесняется в кольцевую проточку 44 и через отверстия 47 попадает в полость стакана 46, создавая в ней давление и перекрывая уплотнением 49 камеру по периферии с возможностью перетекания в ней только через канал дросселя 48, уменьшая скорость истечения и замедляя ход поршня, а следовательно, и процесс кантования. Из камеры 45 жидкость по патрубку 42 перетекает в верхнюю полость цилиндра.
В момент холостого хода (возврата траверсы 2 в исходное положение) гидротормоз испытывает усилие, под действием которого шток 40 входит в цилиндр 38, перемещая вверх поршень 39, создавая избыточное давление в верхней полости, откуда жидкость по патрубку 42 вытесняется в камеру 45. В данной камере создается давление, уплотнение 49 открывается и обеспечивает по периферии свободный доступ жидкости в проточку 44 и через патрубок 42 в нижнюю полость цилиндра, обеспечивая тем самым увеличение скорости истечения.
После окончания работы захват-кантователь устанавливается на опору 24 и на подставки 35.
Вид А
cpus.Z
Видб
ЗВ
фие.З
f-r аёе/уну/тго
в З
сригЛ
дидЛ
Фиг. 6
cpus.7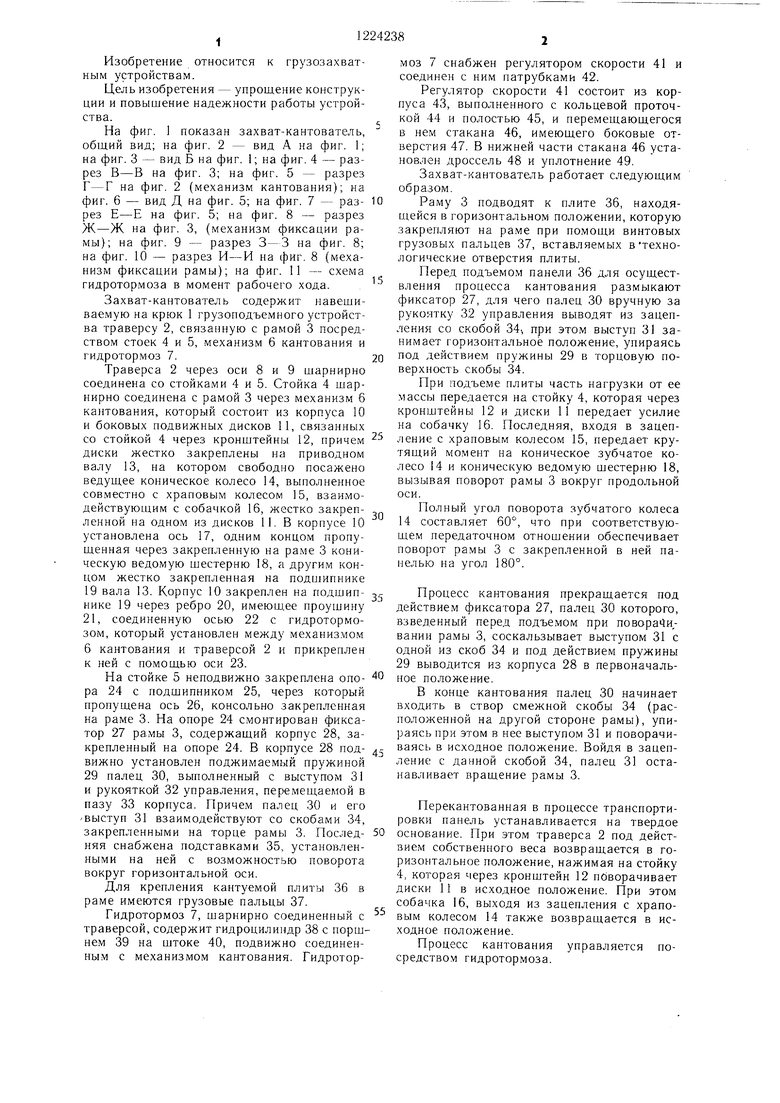
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для изготовления сантетических изделий | 1976 |
|
SU601170A1 |
| Устройство для перекладки изделий | 1977 |
|
SU650948A1 |
| Устройство для перекладки изделий | 1980 |
|
SU893805A2 |
| Захват-кантователь | 1979 |
|
SU885139A1 |
| Рычажно-храповой механизм | 1982 |
|
SU1027458A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| Кантователь изделий | 1975 |
|
SU575304A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
L
30
фаг.т
49 43 4-6 cpus. 11
| Захват-кантователь | 1977 |
|
SU839970A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
