15
20
25
Изобретение относится к трубопрокатному производству и может быть использовано в станах холодной прокатки труб с подви 5сной рабочей клетью.
Цель изобретения - увеличение 5 производительности путем исключения холостых участков хода клети и увеличения длины очага деформации, а также повышение долговечности привода путем уменьшения вертикальных сое- тавляющих динамических нагрузок.
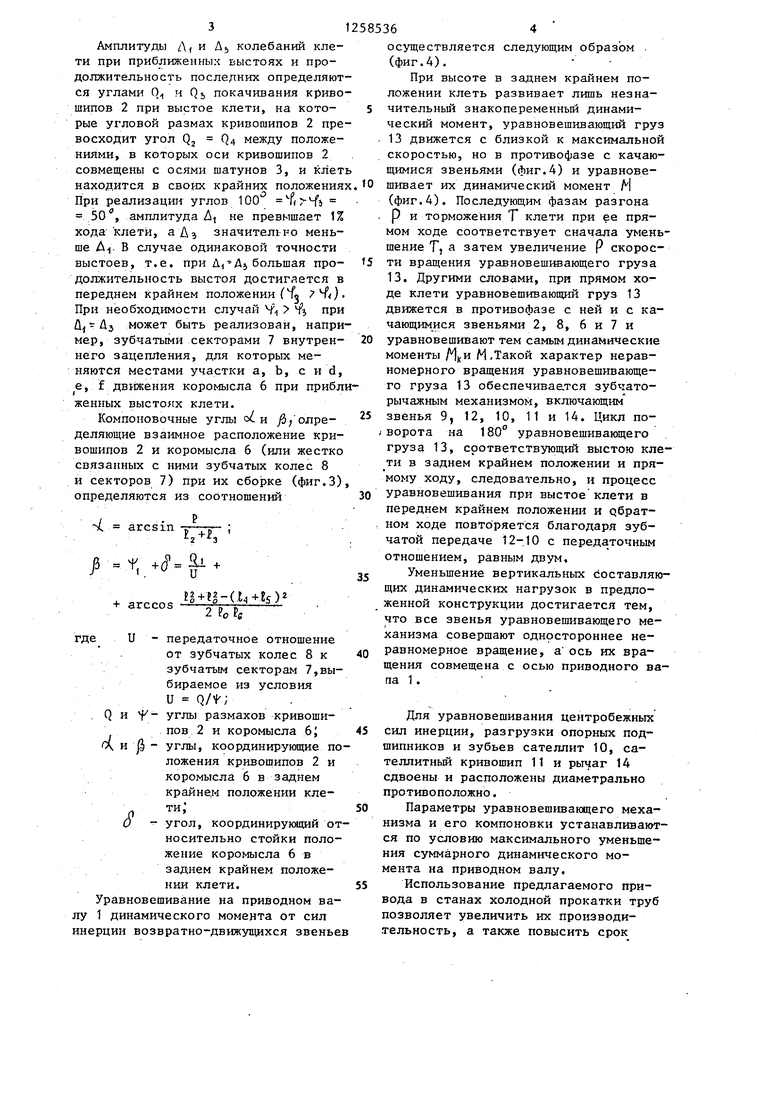
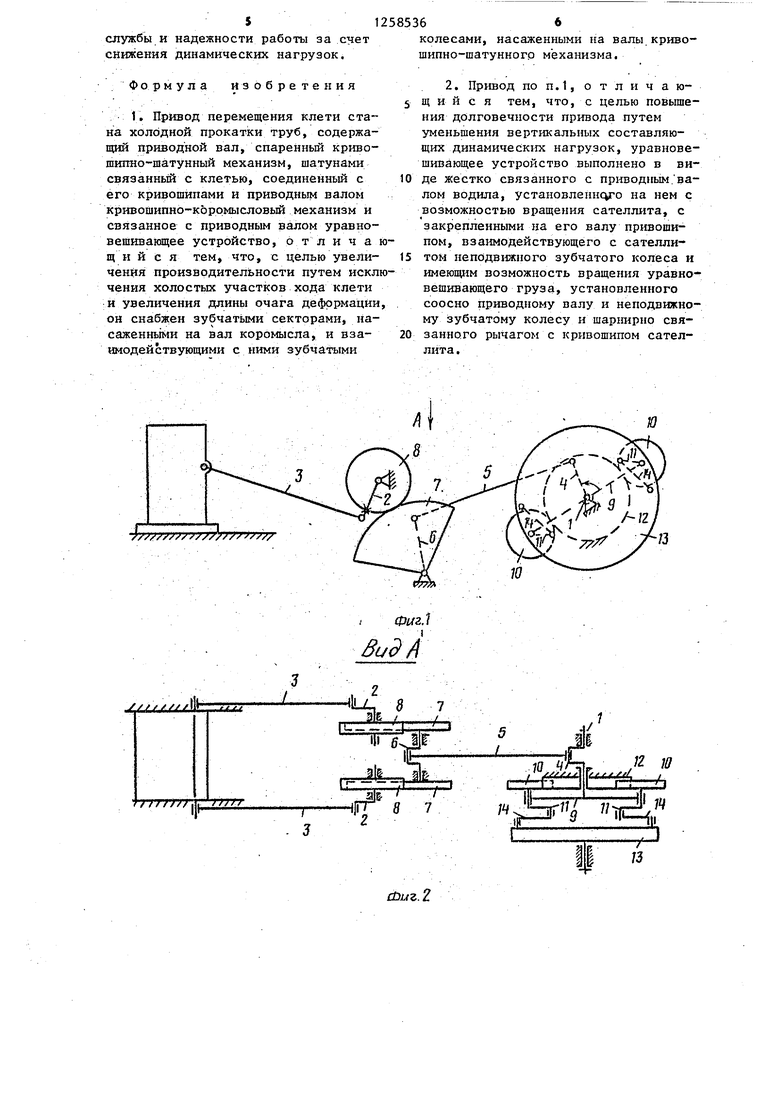
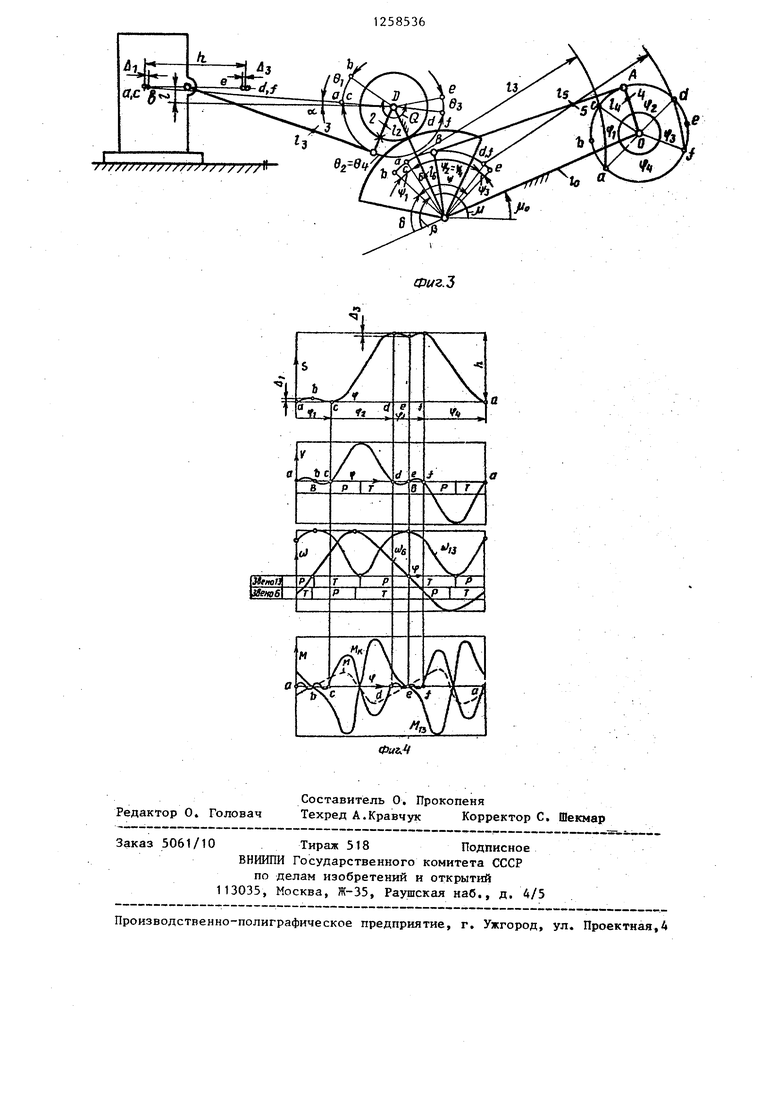
На фиг.1 представлена кинематическая схема привода; на фиг,2 - вид А на фиг,1; па фиг,3 - схема характерных положений звеньев механизма, на фиг,4 - графики: перемещения клети 5| скорости перемещения клети IT, угловой скорости коромысла сОа и уравновешивающего груза u)is динамических моментов на приводном валу от ка- чающихся звеньев М от клети Мк и от уравновешивающего груза niiПривод перемещения клети стана холодной прокатки труб содержит приводной вал 1, спаренный кривошипно- . шатунный механизм, имеющий кривошип 2 и шатуны 3, кривошипно-короьшюловый механизм,имеющий ведущий кривошип 4, шатун 5 и коромысло 6,насаженные на вал коромысла зубчатые сектора 7, взаимодействующие с ними зубчатые колеса 8, насаженные на валы кривошипов спаренного кривошипно-шатунного механизма, и уравновешивающее устройство, имеющее жестко связанное с приводным валом водило 9, установленньй на нем с возможностью вращения сателлит 10 с закрепленным на его валу привощипом 11, взаимодействующее с сателлитом неподвижное зубчатое колесо 12 и враща,ющийся уравновешивающий груз 13, шарнирно связанный рычагом 14 с крргаошипом сателлита,
Устройство работает следующим образом.
От приводного вала 1 вращение сообщается ведущему крйвопшпу 4 и посредством шатуна 5 преобразуется в возвратно-качательное движение коромысла 6 и насаженных на его вал зубчатых секторов 7, От зубчатых секторов 7 возвратно-качательное движение через взаимодействующие с ними зубчатые колеса 8 передается на криво- щипы 2 и через шатуны 3 преобразуется в возвратно-поступательное движение клети. От приводного вала 1 равномерное вращение сообщается так35
40
45
50
55
30
5
0
5
I
же жестко соединенному с ними.води- лу 9 с установленным на нем сателлитом 10, При этом сателлит 10 обкать:- вается по неподвижному зубчатому колесу 12 и вращается вокруг собственной оси вместе с закрегшенньгм на его валу кривошипом 11, который через рычаг 14 вызывает соответствующее неравномерное вращение уравновешивакяце- го груза 13, обеспечивая компенсацию инердион1шх нагрузок.
При своем движении клеть имеет длительные выстой в переднем и заднем крайних положениях, которые достигаются следующим образом, В положении а ширина В, когда коромысло 6 .еще не дошло до своего заднего крайнего положения 6с, угол между осями кривовдипов 2 и шатунов 3 равен 180 и клеть находится в своем заднем крайнем положении. На участке а-Ь-с движения, содержащем задние крайние . положения ЬС и bD коромысла 6 и кривошипов 2, клеть совершает незначительное колебание с амплитудой А, т,е, на этом участке имеет место приближенный выстой клети в ее заднем крайнем положении, продолжительность которого определяется углом Ч ; поворота ведущего кривошипа 4 и в течение которого осуществляется подача и поворот заготовки. Участок c-d движения соответствует перемещению клети из заднего крайнего
5 положения С в переднее d за время, определяемое углом 4 поворота ведущего кривошипа, В положении d, когда коромысло 6 не дошло еще до своего переднего крайнего положе0 кия еС, угол между осями кривошипов 2 и шатунов 3 становится равным нулю и клеть находится в своем переднем крайнем положении d. На участке d. движения, содержащем передние
5 крайние положения еС и eD коромысла 6 и кривошипов 2, клеть также совершает незначительное колебание с амплитудой Aj, т,е, клеть на этом участке имеет приближенный выстой в
0 своем переднем крайнем положении d, продолжительность которого определяется углом fs поворота ведущего кривошипа 4 ив течение которого осуществляется подача заготовки, Учас5 ток движения соответствует возвращению клети в свое заднее крайнее положение за время, определяемое углом поворота входного крикошипа
0
Амплитуды Л( и Д., колебаний клети при приближенных БЫСТОЯХ и продолжительность последних определяются углами 0 и QJ покачивания кривошипов 2 при выстое клети, на кото- рые угловой размах кривошипов 2 превосходит угол QJ Q4 между положениями, в которых оси кривошипов 2 совмещены с осями шатунов 3, и клеть находится в своих крайних положениях При реализации углов 100 50, амплитуда Л не превышает 1% хода клети, аДэ значителгно меньше А. В случае одинаковой точности выстоев, т.е. при Ai Ajбольшая продолжительность выстоя достигается в переднем крайнем положении Cfj 7 Ч ). При необходимости случай Н г при может быть реализован, например, зубчатыми секторами 7 внутреннего зацепления, для которых меняются местами участки а, Ь, с и d, е, движения коромысла 6 при приближенных выстоях клети.
Компоновочные углы и Jbj определяющие взаимное расположение кривошипов 2 и коромысла 6 (или жестко связанных с ними зубчатых колес 8 и секторов 7) при их сборке (фиг.З), определяются из соотношений
Ч
arcsin
+ arccos
де и - передаточное отношение . от зубчатых колес 8 к
зубчатым секторам 7,выбираемое из условия и Q/ f;
. Q и у- углы размахов кривошипов 2 и коромысла 6; Л и Р - углы, координирующие положения кривощипов 2 и коромысла 6 в заднем крайне, положении клети,
угол, координирукнций относительно стойки положение коромысла 6 в заднем крайнем положении клети.
Уравновешивание на приводном вау 1 динамического момента от сил нерции возвратно-движущихся звеньев
t5
5 0
0
осуществляется следующим образом . (фиг.А).
При высоте в заднем крайнем положении клеть развивает лишь незна- чительньй знакопеременный динамический момент, уравновешивающий груз 13 движется с близкой к максимальной скоростью, но в противофазе с качающимися звеньями (фиг.4) и уравновешивает их динамический момент Н (фиг.4). Последующим фазам разгона р и торможения Т клети при ее прямом ходе соответствует сначала уменьшение Т} а затем увеличение Р скорости вращения уравновешивающего груза 13. Другими словами, при прямом ходе клети уравновешивающий груз 13 движется в противофазе с ней и с качающимися звеньями 2, 8, 6 и 7 и уравновешивают тем самым динамические моменты Д1ки М .Такой характер неравномерного вращения уравновешивающего груза 13 обеспечивается зубчато- рычажным механизмом, включающим 5 звенья 9, 12, 10, 11 и 14. Цикл по- (ворота на 180° уравновешивающего груза 13, соответствующий выстою клети в заднем крайнем положении и прямому ходу, следовательно, и процесс уравновешивания при выстое клети в переднем крайнем положении и рбрат- ном ходе повторяется благодаря зубчатой передаче 12-10 с пере1даточным отношением, равным двум.
Уменьшение вертикальных составляющих динамических нагрузок в предложенной конструкции достигается тем, что все звенья уравновешивающего механизма совершают одностороннее неравномерное вращение, а ось их вращения совмещена с осью приводного ва- па 1.
0
5
0
Для уравновешивания центробежных сил инерции, разгрузки опорных подшипников и зубьев сателлит 10, са- теллитный кривошип 11 и рычаг 14 сдвоены и расположены диаметрально противоположно.
Параметры уравновеш шающего механизма и его компоновки устанавливаются по условию максимального уменьшения суммарного динамического момента на приводном валу, Использование предлагаемого привода в станах холодной прокатки труб позволяет увеличить их производительность, а также повысить срок
$12585366
службы и надежности работы за счет колесами, насаженными на валы криво- снижения динамических нагрузок. шипно-шатунногр механизма.
Формула изобретения
.,
1. привод перемещения клети стана холодной прокатки труб, содержащий приводной вал, спаренный криво- шшшо-шатунный механизм, шатунами свяэанньй с клетью, соединенный с его кривошипами и приводным валом кривошипно-коррмысловый механизм и связанное с приводным валом уравновешивающее устройство, о т л и ч а щ и и с я тем, что, с целью увели- ченйя производительности путем исклчения холостых участков хода клети и увеличения длины очага деформации он снабжен зубчатьми секторами, на- саженньгми на вал коромысла, и вза- имодействующими с ними зубчатыми
2. Привод по п.1, о т л и ч а ю- щ и и с я тем, что, с целью повышения долговечности привода путем уменьшения вертикальных составляющих динамичес;К1гх нагрузок, уравновешивающее устройство выполнено в виде жестко связанного с приводным. валом водила, установленнсуо на нем с возможностью вращения сателлита, с закрепленными на его валу привоши- пом, взаимодействующего с сателлитом неподвижного зубчатого колеса и имеющим возможность вращения уравновешивающего груза, установленного соосно приводному валу и неподвижному зубчатому колесу и шарнирно связанного рычагом с кривошипом сателлита.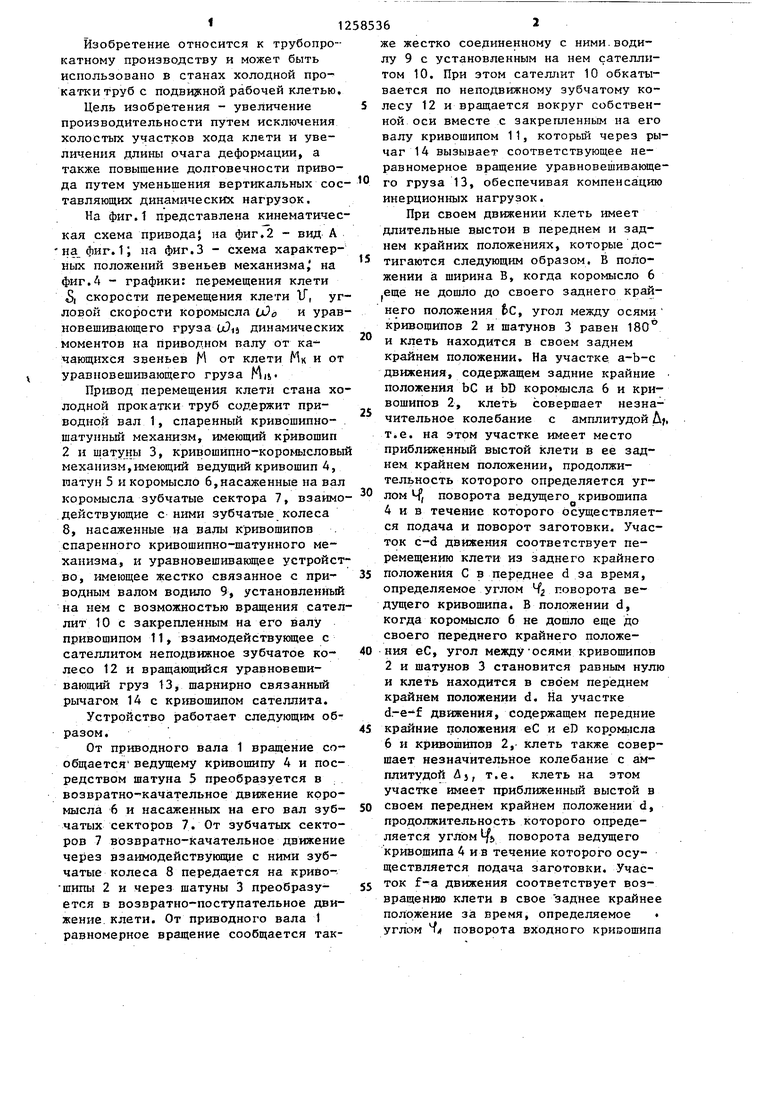
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод возвратно-поступательного перемещения клетей многоклетьевого стана | 1985 |
|
SU1319949A1 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
| Привод клети стана холодной прокатки труб | 1987 |
|
SU1447448A1 |
| Привод клети стана холодной прокатки труб | 1989 |
|
SU1729637A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1482741A1 |
| Привод возвратно-поступательного перемещения частей стана холодной прокатки труб | 1981 |
|
SU1062946A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| Привод перемещения подвижных масс стана холодной прокатки труб | 1986 |
|
SU1412823A1 |
| Привод стана холодной прокатки труб | 1983 |
|
SU1152674A1 |
Изобретение относится к трубопрокатному производству и наиболее эффективно может быть использовано в станах-холодной прокатки труб с подвижной рабочей клетью. Целью изобретения является увеличение производительности путем исключения холостых участков хода клети и увеличения длины очага деформации. Последующей целью является повышение долговечности привода путем уменьшения вертикальных составлякщих динамических нагрузок. Сущность изобретения заключается в снабжении привода, содержащего спаренный кривошипно-шатунный механизм, кривошипно-коромысловый механизм и уравновешиваюп ее устройство, зубчатыми секторами, насаженными на вал коромысла и взаимодействующими с ними зубчатыми колесами, насаженными на валы кривошипов спаренного кривошипно-шатунного механизма. При зтом уравновешивающее устройство выполнено в виде жестко связанного с приводным валом водила, установленного на нем с возможностью вращения сателлита с закрепленными на его валу кривошипом, взаимодействующего с сателлитом неподвижного зубчатого колеса и имеющего возможность вращения уравновешивакяцего груза, установленного соосно приводному валу и неподвижному зубчатому колесу и шарнирно связанного с рычагом с кривошипом сателлита 1 з.п. ф-лы, 4 Ш1. (Л
1 Фиг.1
fDjJZ.Z
Фиг.Ъ
Редактор О. Головач
Составитель О, Прокопеня
Техред А.Кравчук Корректор С. Шекмар
Заказ 5061/10 Тираж 518Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Механизм перемещения клети стана холодной прокатки труб | 1978 |
|
SU718191A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Привод перемещения клети стана холодной прокатки труб | 1976 |
|
SU592472A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
