Описываемый станок предназначается для механической обработки сложных криволинейных поверхностей, например поверхностей объемной оснастки агрегатов самолета или судна запроектированных радиусо-графическим методом.
Отличительная особенность станка заключается в том, что в нем в качестве решающего устройства применен пантограф системы Липкина-Поселье, работающий в периодическом режиме.
Этим обеспечивается упрощение программирования.
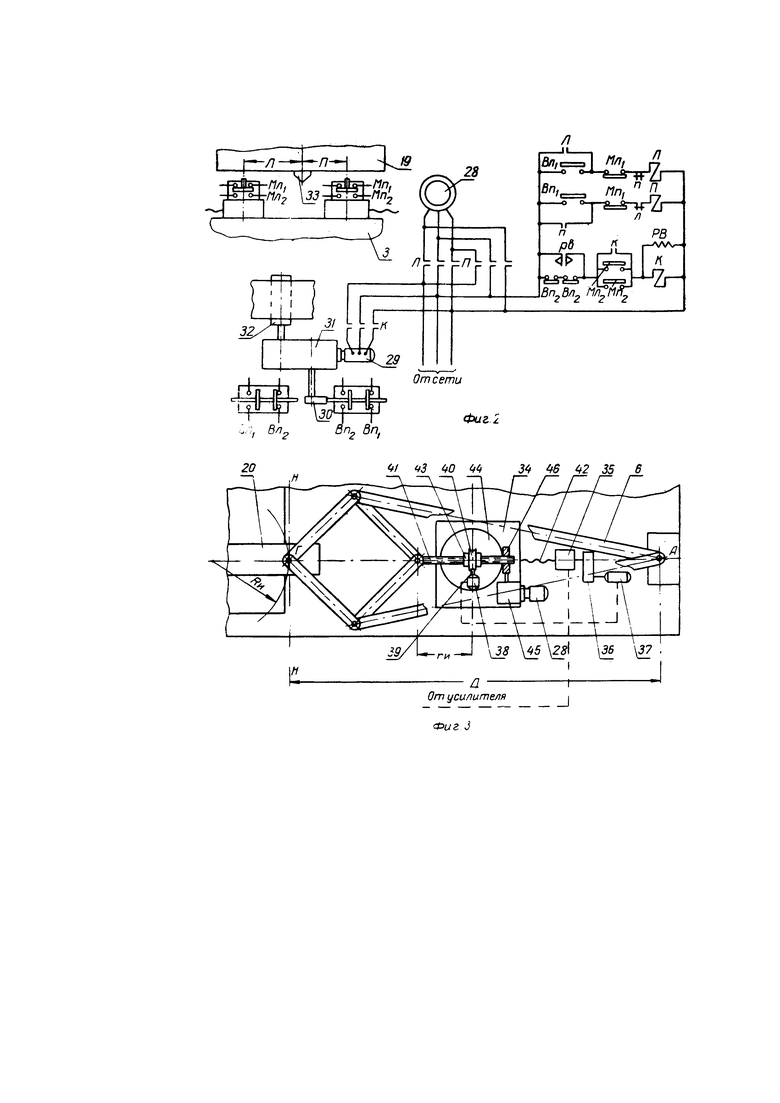
На фиг. 1 схематическое изображение станка, вид сверху; на фиг. 2 - схема управления электрическими двигателями станка; на фиг. 3 - схема его пантографа.
На станине 1 (фиг. 1) имеются две вертикальные стойки 2. По ним перемещается по вертикали траверса 3, на которой находится каретка 4 с фрезой 5, пантограф 6 и другие части станка.
На станине станка также находится круглый стол 7, на котором закрепляется изделие 8. Стол 7 может поворачиваться так, чтобы обрабатываемая поверхность сектора была направлена в сторону траверсы 3. Во время работы стол этот неподвижен.
Установлен стол 7 на поперечной каретке 9, которая, в свою очередь, установлена на каретке 10.
При инверсировании необходимого радиуса пантографом 6 последний воздействует на копировальный прибор 11, который посредством электрокопировальной системы (электронное устройство 12, электрические двигатели 13, 14, редукторы 15, 16 и винты 17, 18) осуществляет следящие движения кареток 19 и 4. Одновременно с кареткой 4 следящие движения осуществляет каретка 20, на которой находится копировальный прибор 11. Копировальный прибор всегда описывает окружности с вогнутостью, направленной от пантографа. Каретка 20 передвигается под воздействием винта 21, который соединен с винтом 18 шестернями 22, 23, 24 прямого хода и шестернями 25, 26 обратного хода.
При обработке выпуклых поверхностей работают шестерни 22, 23, 24 прямого хода, каретки 20 и 4 движутся в одну и ту же сторону. При обработке вогнутых поверхностей в электрическом двигателе 14 меняется направление вращения, и включаются в работу посредством муфты 27 шестерни 25, 26 обратного хода. При этом каретки 20 и 4 движутся синхронно в разные стороны.
Управление электродвигателем 28 качания пантографа и электродвигателем 29 периодического движения ленты осуществляется в соответствии с изображенной на фиг. 2 схемой.
Каретка 19 совершает возвратно-поступательные движения вправо и влево, причем в конечных положениях она останавливается на определенное время. Движение каретки вправо и влево осуществляется реверсивным электродвигателем 29 при его правом и левом вращении.
Правое и левое вращения двигателя зависят от контакторов П и Л, включение которых, в свою очередь, зависит от положения кулачка 30.
Перед включением одного из контакторов и выключением другого проходит определенный промежуток времени, необходимый для отработки программы, записанной на магнитной ленте. Кулачок 30 за время работы программного устройства совершает пол-оборота.
При нажиме этого кулачка на микропереключатель, расположенный справа от него, контакты Вп2 размыкаются, и контактор K останавливает электродвигатель 29 (который через редуктор 31 приводит во вращение шкив 32 перемотки ленты и кулачок 30).
В это же время контакты Вп1 замыкаются, и включается контактор П правого вращения электродвигателя 28. Каретка 19 двигается вправо. Дойдя до крайнего положения (на отрезок П от осевого положения) кулачок 33, находящийся на каретке, нажмет на микропереключатель, расположенный справа от него, и контакты Мп1 разомкнутся, контактор П выключится, и электродвигатель 28 остановится.
Контакты же Мп2 замкнутся и включат контактор K и реле времени РВ, имеющее нормально закрытые контакты, которые находятся после включения в замкнутом состоянии, соответствующем времени поворота кулачка 30 на  оборота.
оборота.
Реле времени необходимо только для начала работы электродвигателя 29, так как в это время один из контактов микропереключателей Вп или Вл всегда разомкнут кулачком 30. Ток пойдет в катушки контактора K и реле времени РВ через замкнутые контакты Мп и рв.
Контактор K включит в работу электродвигатель 29, магнитная лента начнет перематываться, и программное устройство станка подготовит его для работы на следующую строчку. После поворота кулачка 30 на пол-оборота, он нажмет на микропереключатель Вп или Вл, контакты Вл2 которого разомкнутся и отключат электродвигатель 29 (до этого реле времени уже сработало и разомкнуло контакты рв).
Контакты Вл1 замкнутся, сработает контактор Л, электродвигатель 28 начнет перемещать каретку влево до крайнего положения, после чего кулачок 33 нажмет на микропереключатель Мл.
При изменении инверсирующего радиуса rи передвигается каретка 34 от шагового двигателя 35, при этом чтобы не было изменения общей длины Д (фиг. 3) пантографа (когда ось АГ перпендикулярна инверсируемой прямой Н-Н или совпадает с инверсируемым радиусом RИ) применена следящая сельсинная система.
От шагового двигателя 35 через редуктор 36 получает вращение сельсин-датчик 37, который питает сельсин-приемник 38.
Последний посредством червяка 39 вращает червячное колесо-гайку 40, которая навинчивается на винт 41. (Ходовые винты 41 и 42 имеют одинаковый шаг).
Этим достигается постоянство общей длины Д. Червячное колесо-гайка 40 находится между двух щек 43, приваренных к червячному колесу 44. Электродвигатель 28 качания пантографа через редуктор 45 и посредством червяка 46 поворачивает червячное колесо 44, осуществляя качание пантографа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шаговой подачи каретки копировально-фрезерного станка | 1976 |
|
SU616067A1 |
| Резьбошлифовальный станок для обработки метчиков | 1978 |
|
SU732117A1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| Механизм подачи стола копировальнофрезерного станка с программным управлением | 1977 |
|
SU657927A1 |
| Способ фотокопировальной обработки и устройство для его осуществления | 1979 |
|
SU770751A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Устройство для непрерывной бифилярной намотки киноленты | 1981 |
|
SU991350A1 |
| Привод копировального станка дляОбРАбОТКи КулАчКОВыХ ВАлОВ | 1979 |
|
SU831506A1 |
| Устройство для обработки деталей с прерывистыми круглыми пазами | 1976 |
|
SU682353A1 |
| Устройство для автоматического управления копировально-фрезерным станком | 1941 |
|
SU61944A1 |

Станок для механической обработки сложных криволинейных поверхностей, запроектированных радиусографическим методом, отличающийся тем, что, с целью упрощения программирования, в качестве решающего устройства применен пантограф системы Липкина-Поселье, работающий в периодическом режиме.
