epaB.Z
Изобретение относится к машине- строеншо и может быгъ использовано для получен11я линейных реверсивных перемещений с остановками рабочего органа, а таюке До1я получения допол 1Штельног о линейного перемещения рабочего органа в конце хода последнего в направлении5 перпендикулярном основному пepeмeБ eн iFOt
Цель изобретения - рзсшире1гне те нологнчесютх возможностей путем обепечения периодттческого ,аопол штельного движения рабочего органа.
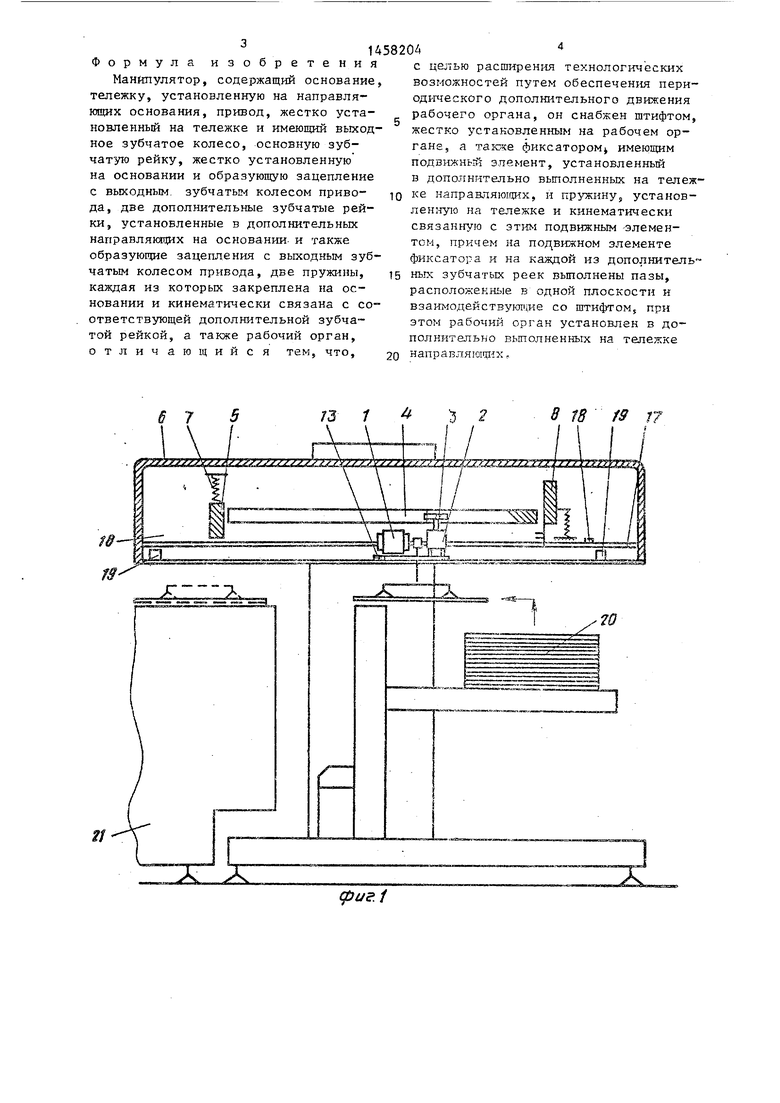
На фиг, 1 изображен описываемый, манипулятор в составе робота для загрузки печатных плат; IM фиг, 2 - манипулятор в промажутотом пололсв - нии рабочего органа , па сЬиг. 3 - то cej Б Kpai-nie s положелш- )абочего органа.
Манипулятор состоит мз двигателя 1 , соеди-ненного с червячным редуктором 2, на выходном валу которого закреплена косозуёая шестерня 3, обкатывакжгаяся по -зубчатому звену-рейке А, С левозЧ стороны рей-- ки 4 расположен левый тормозной механизм, состояций из зуоч атой рейки 5, закрепленной на юорпусе 6 с возможностью вертикального переменке- НИН о Рейка 5 подпру/к1П ег;а тарирован- пружиной 7 сжатия,, С правой стороны от рейки 4 располо: :ен вторсй тормозной механизм состоящга из зубчатой рейки 85 за крепла:-ной на корпусе 6 с возможностью В Е-рТШч аЛЬнОГС
перемещения.. Рейка 8 по.пггружннека та рированной прзокиной 9 сжатия. Рейка в ншкней части имеет верт якальный штырь 10 I горизонтальльй паз Г.,
Рабочий орган 12 (узел вакуумных присосок) закреплен на тележке 13 с. возможностью вертикальнгго перемещения.
На тележке 13 имеется отверстие 14, а также закг- пленный с возмояс- ностью горизонта. поремешенкя фикс ат ор 15 S п одп р yjKi-f и е н ный пр ужиной 1 б сжатия
На корпусе 6 шеются паправ.-ш-- ющие. 17 для теле;ски 13., а-таюке датчики 18 крайних положений и ме- хант-гческис упоры 19 „
Манипулятор работает следукпщм образом,
При двигаталя 1 через червячньй редуктор 2 шестерня 3,. вращаясь, обкать эается rio зубчатому
-
-
45820А2
звену-рейке 4 и, таким образом происходит перемещение тележки 13 по направляющим 17. При перемещении тележки 13 в крайнее правое положение срабатывает датчик 18 и отключает двигатель 1 Одновременно шестерня 3. выйдя из задепления с рейкой 4, входит в зацепление с рейкой 8 пра- IQ вого тормозного механизма, а рабочий орган 12, вьйдя из зацепления с фиксатором 15, входит в паз 11 рейки 8 правого, тормозного механизма Тележка 13 останавливается по t5 упору 19. После остановки тележки шестерня 3 еще проворачивается на какой-то угол за счет инерции вращающихся масс. Рейка В опускается вместе, с рабочим органом, штьгрь 10 2G рейки 8 входит в от-верстие 14 тележки 13в Рабочий орган захватывает заго т.оБку из стопы 20. При включении двигателя 1 в обратном напрайлении шестерня 3, вращаясь, заставляет 25 рейку 3 вместе с рабочим органом и захваченной заготовкой подняться в верхнее псюжение. Далее шестерня 3 входит в зацепление с рейкой 4 горизонтального перемещения, штырь 10 3Q зькодит из отверстия 14, и тележка, перемещается горизонтально влево, Вьп1дя из зацепления с пазом 11 ре,Г;ки. 8,, рабочий орган входит в за- цеп.ление с фиксатором 15 и, таким ,,. образом, остается на все время горизонтального перемещен1-щ в верхнем по.11ох;екии„
При перемещении те.лежки 13 в крайнее левоа положение срабатьтает дат- ,iQ чик 18 крайнего левого положения и отключает двигатель 1. Одновременно шестерня 3,, вьйдя HS зацепления с рейкой 4, входит в зацепление с рейкой 5 лепот О тормозного механизма, дд Тележка 13 останашитеается по механическому упору 19. Поапе остановки тележки а зстерня 3 еще проворачивается за .:чёт инерции вращающихся масс на хакой-то угол, что вызывает .|, перемеще.ше рейки 5, Пружина 7 гасит .кине1 ическу1о энергию вра.щаю11д- хся масс привода Исполнительньй орган кладет заготовку на конвейер технологического оборз дования 21
При включении двигателя 1 в обратном направлении тележка перемещается в крайнее правое положение, 1ЩКЛ повторяется
3
Формула изобретения Манипулятор, содержащий основание тележку, установленную на направля- клцих основания, привод, жестко установленный на тележке и имеющий выходное зубчатое колесо, основную зубчатую рейку, жестко установленную на основании и образующую зацепление с выходным, зубчатым колесом привода, две дополнительные зубчатые рейки, установленные в дополнительных
145
направляющих на основании и также образующие зацепления с выходным зубчатым колесом привода, две пружины, каждая из которых закреплена на основании и кинематически связана с соответствующей дополнительной зубчатой рейкой, а также рабочий орган, отличаюгцийся тем, что.
45820А4
с целью расширения технологических возможностей путем обеспеченгш пери- од1-гаеского дополнительного движения рабочего органа, он снабжен штифтом, жестко установленным на рабочем органе, а тающее фиксатором имеющим подвижный элемент, установленньй в дополнительно вьтолненных на тележ10 ке направляюищх, и пружину, установленную на тележке и кинематически связанную с этим подвижным -элементом, причем на подвижном элементе фиксатора и на каждой из дополнитель™
15 зубчатых реек выполнены пазы, расположенные в одной плоскости и взаимодействуютиие со штифтом, при этом рабочий орган установлен в до- полнитель ю выполненных на тележке
20 направляющих.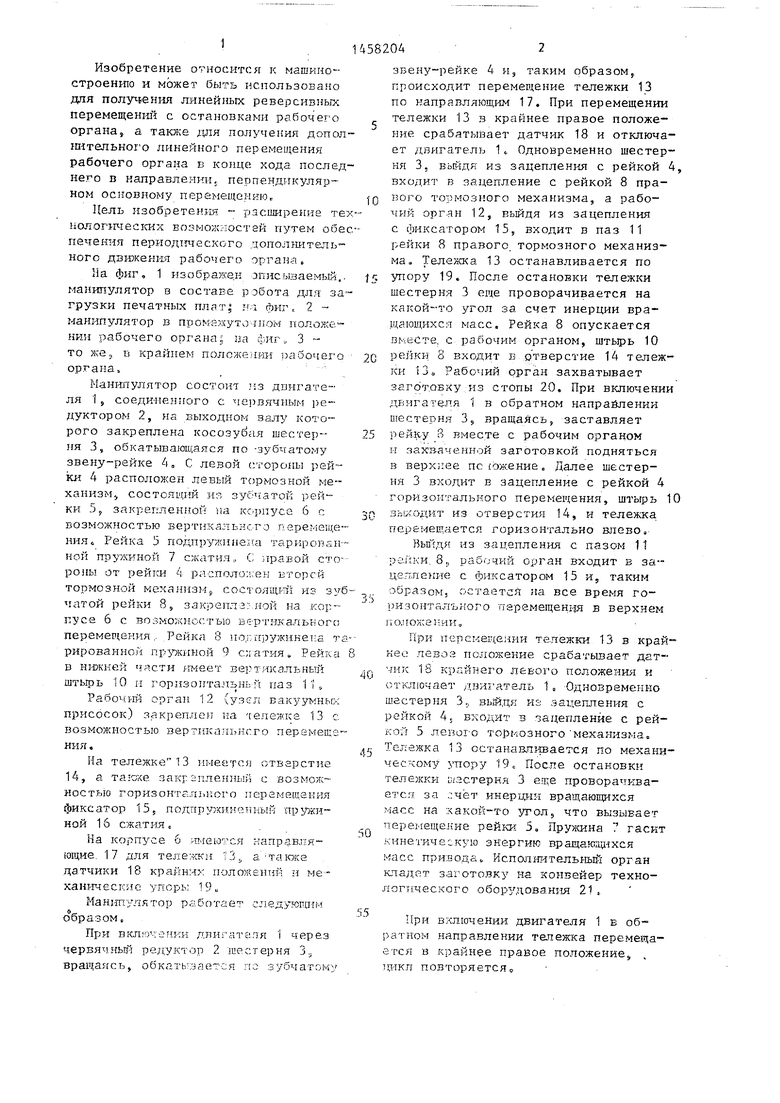
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод | 1985 |
|
SU1260608A1 |
| Манипулятор | 1987 |
|
SU1733232A1 |
| Грузовая подвеска монорельсовой дороги | 1976 |
|
SU610702A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2361750C2 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2045671C1 |
| Манипулятор | 1985 |
|
SU1242347A1 |
Изобретение относится к машиностроению и может быть использовано ддя пол пения реверсивных перемещений рабочего органа, а также для получения дополнительного линейного перемещения рабочего органа в конце хода последнего. Цель изобретения - расширение технологических возможностей путем обеспечения периодического дополнительного движения рабочего органа о При втспючении двигателя 1 происходит перемещение тележки по направ ЛЯЮ1ТЩМ, При перемещении тележки я крайнее положение шестерня 3, выйл, из зацепления с рейкой 4, входит г зацепление с рейкой 8, а штифт рабочего органа 12. выйдя из зацепления с фиксатором 15, входит в паз И рейки 8. После остановки тележки шестерня -3 проворачивается за счет инерции. Рейка 8 опускается вместе с рабочим органом, рабочга орган захва- тьшает заготовку. При включении двигателя 1 в обратном направлении рабочий орган поднимается, шестерня 3 входит в зацепление с рейкой 4, тележка перемещается горизонтально влево и штифт рабочего органа фиксгфуется в пазу фиксатора 15. 3 ил. SETSf f8 Ь 73
6 7
ие.1
2k2Z
4i
Л
.
...Ум1
15
777777 г 7Г/77
Г
фс./г. J
| Привод | 1985 |
|
SU1260608A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
