9
01 ГчЭ
СП
ас
Изобретение относится к машиностроению и может быть использовано в манипуляторах различного назначения, в частности, при выполнении сборочных операций.
Цель изобретения - повышение точности позиционирования за счет ужесточения кинематической цепи.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - то же, продольный разрез; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2.
Манипулятор содержит корпус 1 с на- правляюшими, в которых установлена каретка 2. На каретке 2 установлены револьверная головка 3 со сменными схватами 4,
тов 19 и соответствуюшим зацеплением приводной шестерни 20 с рейками 6 и 7. Осу- ш,ествляется поворот вала двигателя 12. Через муфту 14 вала 13 и шестерни 20 рейка 7 через шестерню 9 осуществляет поворот
головки 3, а рейка 6 отслеживает поворот, который фиксируется датчиком угла поворота (не показан).
Захват или установка объекта осуществляется отключением электромагнитов 19 и
10 движением каретки 2 от приводной шестерни 20 посредством рейки 5. Ориентация объекта осуществляется поворотом охвата 4 от щестерни 8 рейки 6. Предварительно приводн-ая шестерня 20 перемешается одним
рейка 5 для вертикального движения, две | из электромагнитов 19 и рычагом 16 и рейки 6 и 7 с возможностью смещения друг поводком 17 вводится в зацепление с рей- относительно друга, которые размещены в направляющих и входят в зацепление с шестерней 8 привода схватов 4 и шестерней 9 привода головки 3; фиксаторы 10 и 11, взаи20
кой 6.
Использование фиксаторов позволяет повысить точность позиционирования манипулятора.
модействующие с шестернями 8 и 9. В корпусе 1 размещены двигатель 12, шлице- вой вал 13, связанный с двигателем муфтой 14, фиксатор 15 рейки 5, рычаг 16, взаимодействующий с поводком 17, у которого имеется выступ для взаимодействия с фик- г саторами 10, 11 и 15, пружина 18, взаимодействующая с поводком 17, и электромагниты 19, связанные с поводком рычагом 16. На шлицевом валу 13 подвижно в поводке 17 установлена приводная шестерня 20.
Манипулятор работает следующим образом.
Формула изобретения
Манипулятор, содержащий корпус, револьверную головку со сменными схватами, а также двигатель, установленный на корпусе и кинематически связанный с револьверной головкой, отличающийся тем, что, с целью повыщения точности позиционирования за счет ужесточения кинематической цепи, он снабжен кареткой с направляющи- 30 ми, установленными на ней фиксаторами, поводком и зубчато-реечными передачами, рейки которых установлены в направляющих каретки, а шестерни кинематически связаны с револьверной головкой и с ее сменными схватами, а также шлицевым валом.
Манипулятор, содержащий корпус, револьверную головку со сменными схватами, а также двигатель, установленный на корпусе и кинематически связанный с револьверной головкой, отличающийся тем, что, с целью повыщения точности позиционирования за счет ужесточения кинематической цепи, он снабжен кареткой с направляющи- 30 ми, установленными на ней фиксаторами, поводком и зубчато-реечными передачами, рейки которых установлены в направляющих каретки, а шестерни кинематически связаны с револьверной головкой и с ее сменными схватами, а также шлицевым валом.
Поочередным включением электромагнитов 19 рычаг 16 перемещает поводок 17 и приводную шестерню 20 до зацепления с 35 смонтированным в корпусе, и приводной шес- одной рейкой 6 или двумя рейками 6 и 7. Притерней, установленной на этом шлицевом
этом выступ поводка 17 отводит фиксатор 10 или два фиксатора 10 и 11. При отключенных электромагнитах Г9 пружина 18 возвращает поводок 17 и рычаг 16 в исходное положение, вводя шестерню 20 в зацепление с рейкой 5, а выступ поводка 17 отводит фиксатор 15.
Во время переключений двигатель 12 находится в режиме удержания. Выход любого механизма в исходное положение происхо- 5 дит при отключении двигателя движением реек соответствующими пружинами до упора.
Перед захватом объекта происходит выбор схвата 4 включением электромагнивалу, причем револьверная головка шарнир- но смонтирована на каретке, шлицевой вал кинематически связан с двигателем, приводная шестерня шлицевого вала имеет возможность зацепления с рейками зубчато- реечных передач, а шестерни этих зубчато- реечных передач взаимодействуют с фиксаторами, при этом фиксаторы кинематически связаны с приводной шестерней шлицевого вала посредством поводка, шарнирно соединенного с дву.мя дополнительно введенными электромагнитами, а каретка .уста- новлена в корпусе в дополнительно выполненных направляющих.
тов 19 и соответствуюшим зацеплением приводной шестерни 20 с рейками 6 и 7. Осу- ш,ествляется поворот вала двигателя 12. Через муфту 14 вала 13 и шестерни 20 рейка 7 через шестерню 9 осуществляет поворот
головки 3, а рейка 6 отслеживает поворот, который фиксируется датчиком угла поворота (не показан).
Захват или установка объекта осуществляется отключением электромагнитов 19 и
движением каретки 2 от приводной шестерни 20 посредством рейки 5. Ориентация объекта осуществляется поворотом охвата 4 от щестерни 8 рейки 6. Предварительно приводн-ая шестерня 20 перемешается одним
из электромагнитов 19 и рычагом 16 и поводком 17 вводится в зацепление с рей-
кой 6.
Использование фиксаторов позволяет повысить точность позиционирования манипулятора.
Формула изобретения
Манипулятор, содержащий корпус, револьверную головку со сменными схватами, а также двигатель, установленный на корпусе и кинематически связанный с револьверной головкой, отличающийся тем, что, с целью повыщения точности позиционирования за счет ужесточения кинематической цепи, он снабжен кареткой с направляющи- ми, установленными на ней фиксаторами, поводком и зубчато-реечными передачами, рейки которых установлены в направляющих каретки, а шестерни кинематически связаны с револьверной головкой и с ее сменными схватами, а также шлицевым валом.
смонтированным в корпусе, и приводной шес- терней, установленной на этом шлицевом
валу, причем револьверная головка шарнир- но смонтирована на каретке, шлицевой вал кинематически связан с двигателем, приводная шестерня шлицевого вала имеет возможность зацепления с рейками зубчато- реечных передач, а шестерни этих зубчато- реечных передач взаимодействуют с фиксаторами, при этом фиксаторы кинематически связаны с приводной шестерней шлицевого вала посредством поводка, шарнирно соединенного с дву.мя дополнительно введенными электромагнитами, а каретка .уста- новлена в корпусе в дополнительно выполненных направляющих.
sl
to
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1123844A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| Револьверная головка | 1990 |
|
SU1803275A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| Манипулятор | 1986 |
|
SU1371897A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
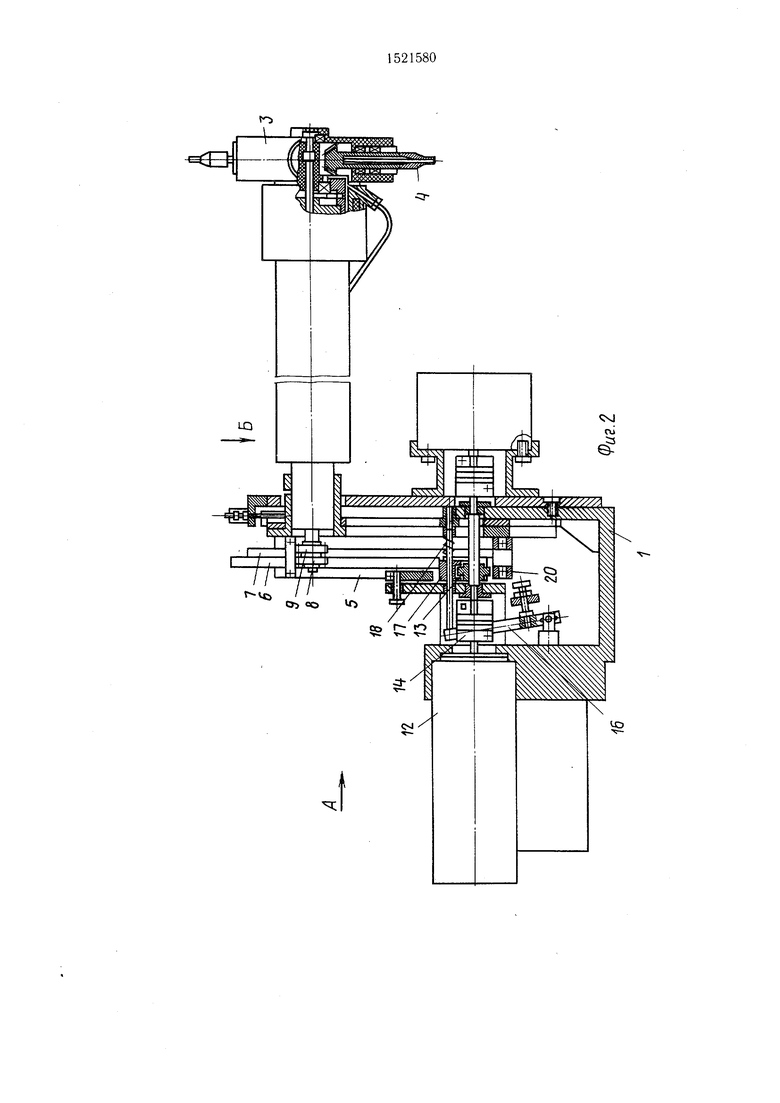

Изобретение относится к машиностроению и может быть использовано в манипуляторах различного назначения, в частности при выполнении сборочных операций. Цель изобретения - повышение точности позиционирования за счет ужесточения кинематической цепи. Поочередным включением электромагнитов 19, установленных на корпусе, поводок 17 перемещает приводную шестерню 20 по шлицевому валу до зацепления с одной рейкой 6 или двумя рейками 6 и 7, установленными в направляющих на каретке. Выступ поводка 17 отводит фиксатор 10 или два фиксатора 10 и 11. Перед захватом объекта производится выбор схвата 4 револьверной головки 3 со сменными схватами, для чего включаются электромагниты 19. Затем осуществляется поворот вала двигателя 12, движение которого передается на револьверную головку посредством зубчато-реечных передач, имеющих рейки 6 и 7 и шестерни 8 и 9. Установка объекта осуществляется отключением электромагнитов 19 и движением каретки 2, установленной в направляющих, выполненных на корпусе 1, от приводной шестерни 20 посредством рейки 5. 4 ил.
U.Z
19
/ 19
10 «
| Способ металлизации изделий | 1983 |
|
SU1123744A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
