измерении вращение вала 5 передается на ролик 6 с эластичным покрытием 7, что обеспечивает вращение наружного кольца шарикоподшипника 3 выбор радиального зазора в одну сторону. Через зубчатую передачу 16 вращение от вала 5 передается на оправку
10, которая поворачивает внутреннее кольцо шарикоподшипника 3 на один оборот за время контроля. Измерение ;зазора осуществляется датчиком 13, которьш управляет соленоидом 14 с целью сортировки шарикоподшипников. .1 ил.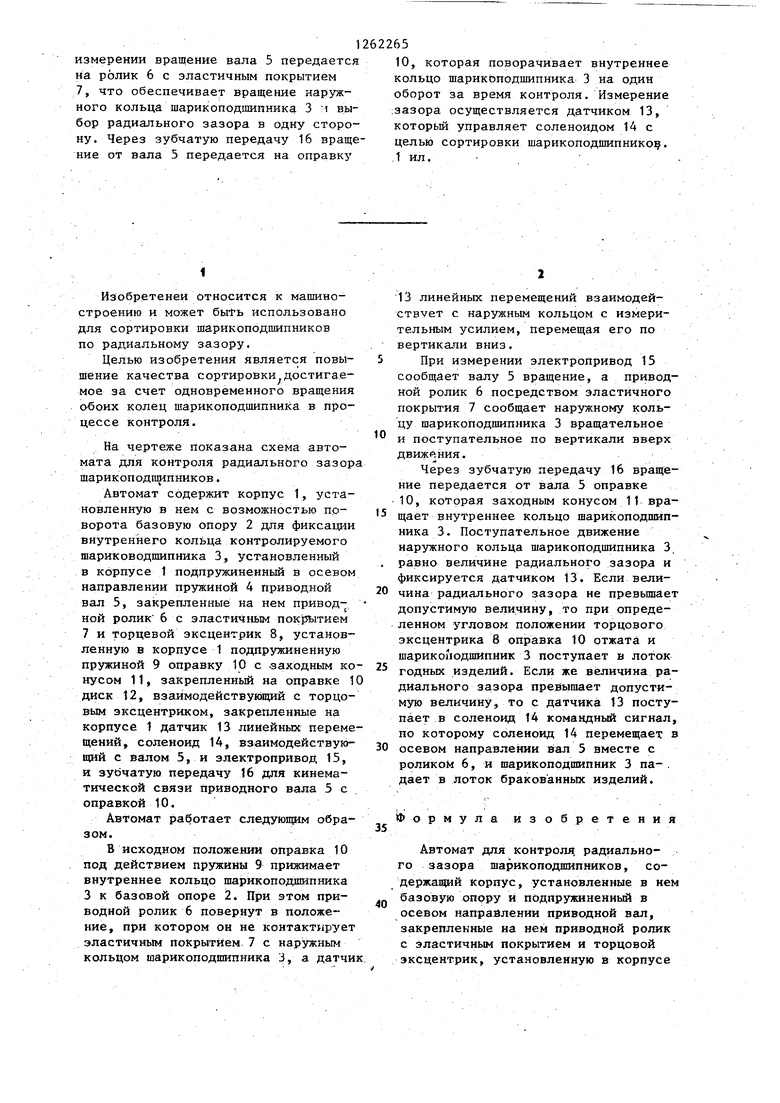
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля радиальногозАзОРА шАРиКОпОдшипНиКОВ | 1978 |
|
SU807036A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| Автомат для контроля и сортировкигНЕзд шТЕпСЕльНыХ РАз'ЕМОВ | 1979 |
|
SU820912A1 |
| Устройство для подачи и мерной резки длинномерного материала | 1982 |
|
SU1134267A1 |
| ТУРБОНАСОСНЫЙ АГРЕГАТ И СПОСОБ ПЕРЕКАЧИВАНИЯ ХОЛОДНОЙ, ГОРЯЧЕЙ И ПРОМЫШЛЕННОЙ ВОДЫ | 2013 |
|
RU2511967C1 |
| ТУРБОНАСОСНЫЙ АГРЕГАТ И СПОСОБ ПЕРЕКАЧИВАНИЯ ХОЛОДНОЙ, ГОРЯЧЕЙ И ПРОМЫШЛЕННОЙ ВОДЫ | 2013 |
|
RU2511970C1 |
| Устройство для резки труб | 1985 |
|
SU1328087A1 |
| Автомат для выполнения технологических операций с деталями типа колец подшипников | 1978 |
|
SU899330A1 |
| Устройство для перемещения и укладки плоских деталей | 1990 |
|
SU1740288A1 |
Изобретение относится к машиностроению и может быть использовано для сортировки шарикоподшипников по радиальному зазору. Целью изобретения является пЬвьш1ение качества сортировки путем одновременного вращения обоих колец шарикоподшипника в процессе контроля. В корпусе 1 автомата установлена оправка 10, которая под действием пружины 9 прижимает внутреннее кольцо шарикоподшипника 3 к поворотной базовой опоре 2. При (Л С
Изобретеней относится к машиностроению и может использовано для сортировки шарикоподшипников по радиальному зазору. Целью изобретения является повышение качества сортировки достигаемое за счет одновременного вращения обоих колец шарикоподшипника в процессе контроля. На чертеже показана схема автомата для контроля радиального зазор шарикоподпмпников. Автомат содержит корпус 1, установленную в нем с возможностью поворота базовую опору 2 для фиксации внутреннего кольца контролируемого шариководшипника 3, установленный в корпусе 1 подпружиненный в осевом направлении пружиной 4 приводной вал 5, закрепленные на нем приводной ролик 6 с эластичным пок1Яытием 7 и торцевой эксцентрик 8, установленную в корпусе 1 подпружиненную пружиной 9 оправку 10 с -заходным ко нусом 11, закрепленный на оправке диск 12, взаимодействукщий с торцовым эксцентриком, закрепленные на корпусе 1 датчик 13 линейных переме щений, соленоид 14, взаимодействующий с валом 5, и электропривод 15, и зубчатую передачу 16 для кинематической связи приводного вала 5с оправкой 10. Автомат работает следующим образом. В исходном положении оправка 1О под действием пружины 9 прижимает внутреннее кольцо шарикоподшипника 3 к базовой опоре 2. При этом приводной ролик 6 повернут в положение, при котором он не контактирует эластичным покрытием 7 с наружным кольцом шарикоподшипника 3, а датчи 13 линейньгх перемещений взаимодействует с наружным кольцом с измерительным усилием, перемещая его по вертикали вниз. При измерении электропривод 15 сообщает валу 5 вращение, а приводной ролик 6 посредством эластичного покрытия 7 сообщает наружному кольцу шарикоподшипника 3 вращательное и поступательное по вертикали вверх движения. Через зубчатую передачу 16 вращение передается от вала 5 оправке 10, которая заходным конусом 11 вращает внутреннее кольцо шарикоподшипника 3. Поступательное движение наружного кольца шарикоподшипника 3 равно величине радиального зазора и фиксируется датчиком 13. Если величина радиального зазора не превьшиет допустимую величину, то при определенном УГЛОВОМ положении торцового эксцентрика 8 оправка 10 отжата и шарикоподшипник 3 поступает в лоток годных изделий. Если же величина радиального зазора превышает допустимую величину, то с датчика 13 поступает в соленоид 14 командный сигнал, по которому соленоид 14 перемещает в осевом направлении вал 5 вместе с роликом 6, и шарикоподшипник 3 па-, дает в Лоток бракованных изделий. Формула изобретения Автомат для контроля, радиального зазора шарикоподшипников, содержащий корпус, установленные в нем базовую опору и подпружиненный в осевом направлении приводной вгш, закрепленные на нем приводной ролик с эластичным покрытием и торцовой эксцентрик, установленную в корпусе 312 подпружиненную оправку с заходным конусом на конце, предназначенным для прижатия внутреннего кольца контролируемого подшипника к базовой опоре, поводок, закрепленный на оправке с возможностью контактирования с торцовым эксцентриком, датчик плнейных перемещений, закрепленный на корпусе с возможностью контактирования с наружным кольцом контролируе :- 10 а 5 мого под1Ш1пника, установленные в корпусе соленоид и электропривод, взаимодействующие с валом, о т л ичающийся тем, что, с целью повышения качества сортировки, он снабжен зубчатой передачей для кинематической связи приводного вала с оправкой, базовая опора установлена в корпусе с возможностью поворота. поводок выполнен в внде диска.
| Автомат для контроля радиальногозАзОРА шАРиКОпОдшипНиКОВ | 1978 |
|
SU807036A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
