N5
О5
00
ел
4
Изобретение относится к судостроению и может быть использовано для удержания судна или другого плавучего объекта в заданной точке при глубоководной стоянке.
Цель изобретения - повышение точности стабилизации.
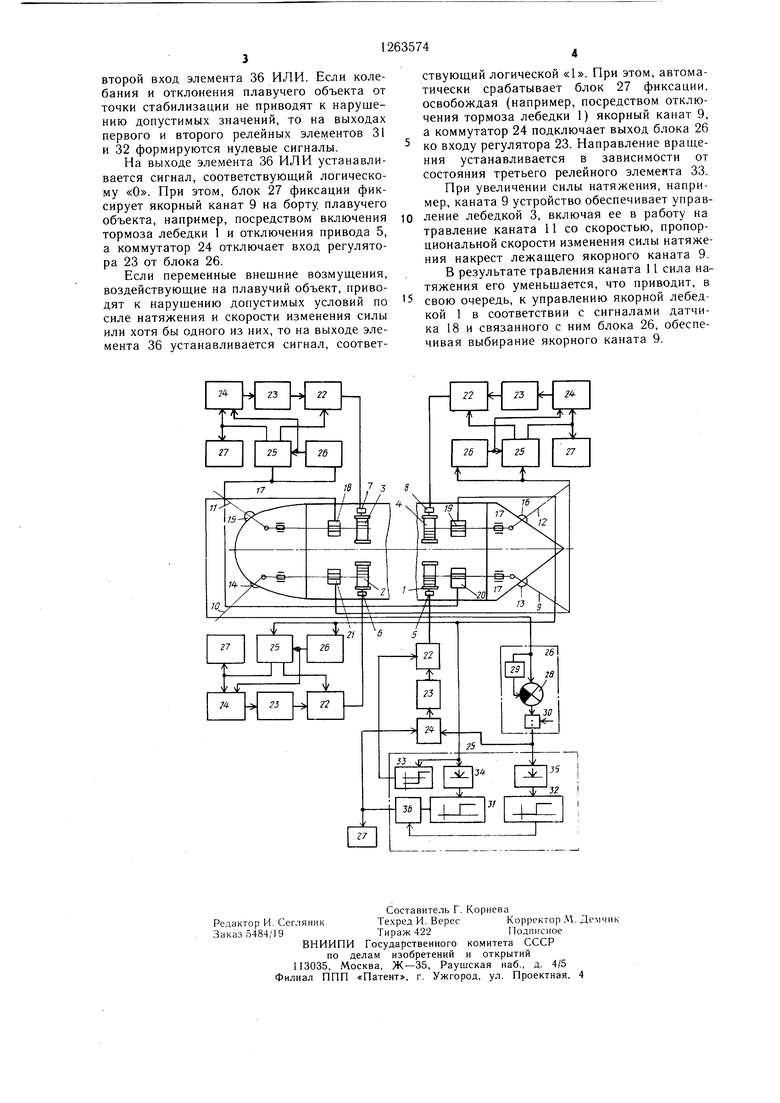
На чертеже представлена функциональная схема устройства.
Устройство содержит лебедку 1-4, снабженные приводами 5-8 и предназначенные для выбирания якорных цепей 9-12 через клюзы 13-16, расположенные в носовой и кормовой оконечностях судна по одному с каждого борта таким образом, что канаты являются накрест лежащими.
Роульсы 17 служат для придания якорным канатам необходимого направления.
Перед лебедками 1-4 установлены связанные с якорными канатами 9-12 датчики 18-21, каждый из которых может быть выполнен, например, в виде трех шкивов с проходящим между ними якорным канатом, имеющим изгиб на среднем шкиве с которым связан тол,- -:тель, воздействующий на переменное conpoiau 1ение, изменяющее выходной электрический сигнал датчика.
Выходы датчиков 18-21 связаны с каналами управления приводов 5-8. Каждый канал управления соответствующим приводом 5, 6, 7 или 8 содержит блок задания режима работы 22, регулятор 23 частоты вращения двигателя лебедки, коммутатор 24, блок 25 формирования управляющих сигналов.
Устройство содержит блок 26 определения скорости изменения силы натяжения соответствующего накрест лежащего якорного каната, а также блок 27 фиксации, который, например, может быть выполнен в виде автоматического стопора соответствующего якорного каната, или в виде электротормоза якорной лебедки. При этом, вход блока измерения скорости изменения 26 силы натяжения соединен с выходом датчика измерения силы натяжения накрест лежащего каната (например, с выходом датчика 18) и с одним входом блока 25, другой вход которого связан с выходом блока 26 измерения и с первым входом коммутатора 24, второй вход которого связан с выходом блока 25 и входом блока 27. Второй выход блока 25 связан с первым входом блока 22, второй вход которого подключен к выходу регулятора.
Каждый блок 26 содержит сумматор 28, элемент 29 задержки и делитель 30. Выход делителя 30 является выходом блока 26, входом которого является объединенный со входом элемента 29 первый вход сумматора 28, второй инвертируемый вход которого подключен к выходу элемента 29. Выход сумматора 28 соединен со входом делителя 30.
Каждый блок 25 содержит первый и второй релейные элементы 31 и 32 с односторонней релейной характеристикой, третий релейный элемент 33 с реверсивной релейной
характеристикой, первый и второй элементы 34 и 35 выделения модуля и элемент 36 ИЛИ, выход которого является выходом блока 25.
Устройство работает следующим образом.
В процессе стабилизации плавучего объекта в заданной точке осуществляется непрерывной контроль сил натяжения канатов 9-12 с помощью датчиков 20, 21, 18, 19 соответственно.
При этом, одновременно обеспечивается контроль скоростей изменения сил натяжения якорных канатов 9-12 с помощью блоков 26. Сигнал о скорости изменения силы натяжения, например, якорного каната 11 формируется следующим образом. В момент времени t сигнал F(t) с датчика 18 поступает одновременно на вход элемента 29 и на первый сумматор 28, на второй инвертируемый вход которого поступает сигнал с выхода элемента 29. Результирующий сигнал,
Q формируемый на выходе сумматора 28, поступает на вход делителя 30, на выходе которого формируется сигнал, соответствующий текущему значению производной или скорости изменения силы натяжения якорного каната 11. В зависимости от сигналов
5 датчика 18 и связанного с ним блока 26 обеспечивается регулируемое изменение длины якорного каната 9 путем управления частотой вращения привода 5 лебедки 1. При этом, изменение частоты вращения обеспечивает регулятор 23, на выходе которого
0 формируется сигнал, пропорциональный абсолютной величине сигнала блока 16, соответствующего скорости изменения натяжения накрест лежапхего каната 11, а изменение направления вращения привода 5 обеспечивается изменением состояния блока 22 в
зависимости от сигнала, поступающего с первого выхода блока 25, в частности с выхода третьего релейного элемента 33 с реверсивной релейной характеристикой. Блок 25, кроме того, обеспечивает управления блоком 27
0 и состоянием коммутатора 24, имеющего возможность подключать и отключать вход регулятора 23 к выходу блока 26. Блок 25 обрабатывает сигналы, поступающие с датчика 18 и. с блока 26 следующим образом.
5 Сигнал датчика 18 изменения силы натяжения якорного каната 11 поступает через первый элемент 34 на вход первого релейного элемента 31, на выходе которого формируется сигнал в соответствии со статической характеристикой релейного элемента
0 31, который затем поступает на первый вход элемента 36 ИЛИ.
В свою очередь, выходной сигнал блока 26, соответствующий скорости изменения натяжения накрест лежащего якорного каната 11, через второй элемент 35 выделения модуля поступает на вход второго релейного элемента 32 с односторонней релейной статической характеристикой, а затем на
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1977 |
|
SU639999A2 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145439A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Электропривод постоянного тока | 1984 |
|
SU1241396A1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПЛАВУЧЕГО ОБЪЕКТА, содержащее роульсы и лебедки для выбирания и травления якорных канатов с приводами, связанными с каналами дистанционного управления, к одному входу каждого из которых подключен датчик силы натяжения соответствующего каната, отличающееся тем, что, с целью повышения точности стабилизации, оно снабжено по числу канатов блоками определения скорости изменения силы натяжения и блоками фиксации канатов, а каждый из каналов дистанционного управления приводом лебедки содержит блок формирования управляющих сигналов, подключенные к его первому и второму выходам своими первыми входами блок задания режимов и коммутатор, а также регулятор частоты вращения двигателя лебедки, через который выход коммутаора связан с вторым входом блока задания режимов, при этом блок формирования управляющих сигналов состоит из элементов выделения модулей, входы которых являются входами блока релейных элементов и элемента ИЛИ, выход которого является вторым входом блока, а входы подключены к выходам эле ментов выделения модуля через первый и второй релейные элементы, при этом третий О) релейный элемент включен между первыми входом и выходом блока формирования управляющих сигналов.
| Якорное устройство | 1972 |
|
SU438575A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
