1
Изобретение относится к области судостроения и может быть использовано для удержания судна в заданной точке при глубоководной стоянке.
Известны якорные устройства, включаюш,ие роульсы и лебедки для выбирания и травления якорных канатов. Однако эти устройства не обеспечивают автоматического удержания судна в заданной точке, что необходимо при проведении работ на больших глубинах.
Цель изобретения - обеспечение автоматического удержания судна в заданной точке при глубоководной стоянке на якоре.
В предлагаемом якорном устройстве каждая лебедка снабжена дистанционно управляемым приводом и электрически связанным с ним приспособлением для измерения усилий натяжения якорного каната, которое выполнено в виде трех шкивов и датчика измерения усилий натяжения каната и преобразования их в электросигналы, взаимодействующего со средним из шкивов посредством толкателя.
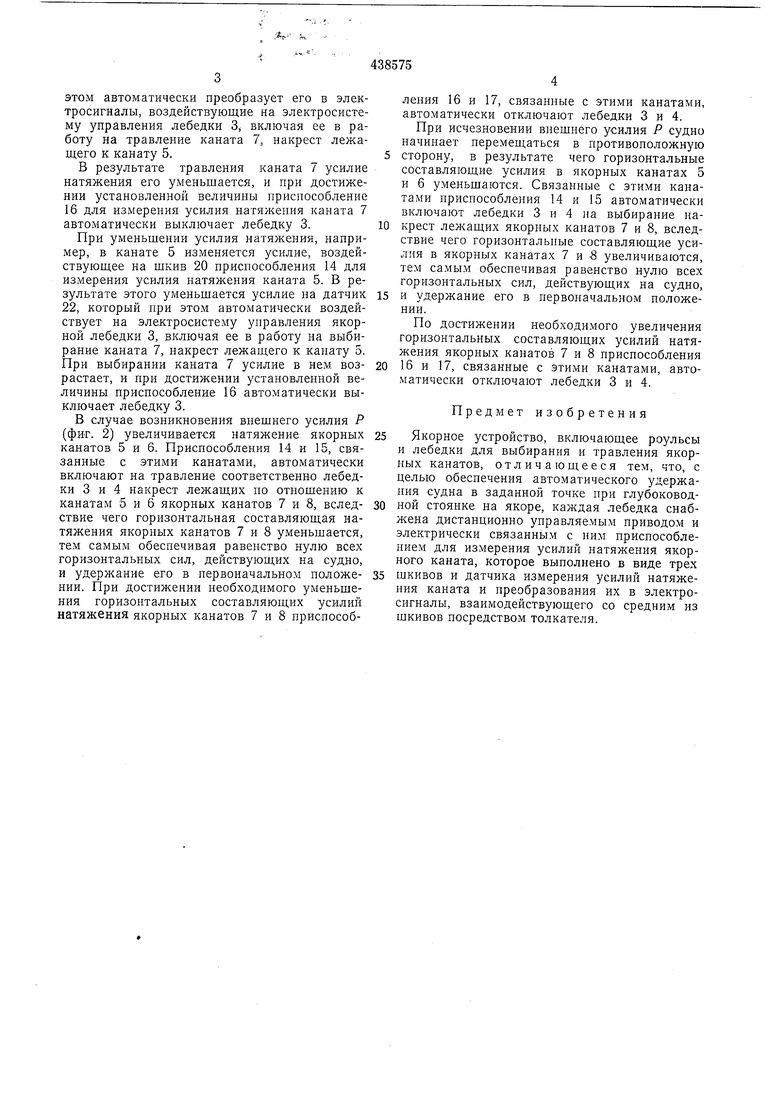
На фиг. 1 показано судно (общий вид) с якорным устройством; на фиг. 2 - то же, вид сверху.
Якорное устройство состоит из якорных лебедок 1, 2, 3, 4, снабженных дистанционно управляемыми приводами и предназначенных для выбирания и травления якорных канатов 5, 6, 7, 8, которые проходят соответственно
через клюзы 9, 10, 11 и 12, расположенные и носовой и кормовой оконечностях судна по одному с каждого борта таким образом, что канаты 5 и 7, 6 и 8 являются накрест лежашими.
Роульсы 13 служат для придания якорным канатам необходимого направления.
Иеред лебедками 1, 2, 3, 4 установлены связанные с якорными канатами 5, 6, 7, 8 приспособления 14, 15, 16 и 17 для измерения усилий натяжения канатов, каждое из которых выполнено в виде трех шкивов 18, 19, 20 с проходящим между ними якорным канатом, имеющим изгиб на среднем шкиве 20. Со
средним шкивом 20 связан толкатель 21, воздействующий, например, на гидравлический или электрический датчик 22.
Датчик 22 приспособлений 14, 15, 16 и 17 преобразует изменение усилия от шкива 20,
а следовательно, и изменение усилия натяжения якорного каната в электросигналы, воздействующие на электросистему управления якорных лебедок накрест лежащих якорных канатов и лебедок, перед которыми установлены приспособления. При увеличении усилия, например, в канате 5 из.меняется усилие, воздействующее на щкив 20 приспособления 14 для измерения усилия натяжения каната 5. При этом изменяется усилие, действующее
через толкатель 21 на датчик 22, который при
этом автоматически преобразует его в электросигналы, воздействующие на электросистему управления лебедки 3 включая ее в работу на травление каната 7, накрест лежащего к канату 5.
В результате травления каната 7 усилие натяжения его уменьщается, и при достижении установленной величины приспособление 16 для измерения усилия натяжения каната 7 автоматически выключает лебедку 3.
При уменьшении усилия натяжения, например, в канате 5 изменяется усилие, воздействующее на шкив 20 приспособления 14 для измерения усилия натяжения каната 5. В результате этого уменьшается усилие на датчик 22, который при этом автоматически воздействует на электросистему управления якорной лебедки 3, включая ее в работу на выбирание каната 7, накрест лежащего к канату 5. При выбирании каната 7 усилие в нем возрастает, и при достижении установленной величины приспособление 16 автоматически выключает лебедку 3.
В случае возникновения внешнего усилия Р (фиг. 2) увеличивается натяжение якорных канатов 5 и 6. Приспособления 14 и 15, связанные с этими канатами, автоматически включают на травление соответственно лебедки 3 и 4 накрест лежащих по отношению к канатам 5 и 6 якорных канатов 7 и 8, вследствие чего горизонтальная составляющая натяжения якорных канатов 7 и 8 уменьшается, тем самым обеспечивая равенство нулю всех горизонтальных сил, действующих на судно, и удержание его в первоначальном положении. При достижении необходимого уменьшения горизонтальных составляющих усилий натяжения якорных канатов 7 и 8 приспособления 16 и 17, связанные с этими канатами, автоматически отключают лебедки 3 и 4.
При исчезновении внешнего усилия Р судно начинает перемещаться в противоположную 5 сторону, в результате чего горизонтальные составляющие усилия в якорных канатах 5 и 6 уменьшаются. Связанные с этими канатами приспособления 14 и 15 автоматически включают лебедки 3 и 4 на выбирание накрест лежащих якорных канатов 7 и 8, вследствие чего горизонтальные составляющие усилия в якорных канатах 7 и И увеличиваются, тем самым обеспечивая равенство нулю всех горизонтальных сил, действующих на судно,
5 и удержание его в первоначальном положении.
По достижении необходимого увеличения горизонтальных составляющих усилий натяжения якорных канатов 7 и 8 приспособления
0 16 и 17, связанные с этими канатами, автоматически отключают лебедки 3 и 4.
Предмет изобретения
5 Якорное устройство, включающее роульсы и лебедки для выбирания и травления якорных канатов, отличающееся тем, что, с целью обеспечения автоматического удержания судна в заданной точке при глубоководной стоянке на якоре, каждая лебедка снабжена дистанционно управляемым приводом и электрически связанным с ним приспособлением для измерения усилий натяжения якорного каната, которое выполнено в виде трех
5 щкивов и датчика измерения усилий натяжения каната и преобразования их в электросигналы, взаимодействующего со средним из щкивов посредством толкателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации плавучего объекта | 1984 |
|
SU1263574A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
| Устройство для спуска и подъема большегрузных катеров и других плавающих объектов | 1972 |
|
SU500114A1 |
| Якорное устройство для автоматического удержания плавсредства в заданной точке водного пространства | 1976 |
|
SU669041A1 |
| Глубоководное якорное устройство | 1968 |
|
SU269725A1 |
| Устройство для выборки на палубу плавучего крана усов буксирной полудраги | 1979 |
|
SU950586A1 |
| СПОСОБ УДЕРЖАНИЯ СПАСАТЕЛЬНОГО СУДНА НАД АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2510350C2 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА КАТЕРОВ | 1966 |
|
SU187551A1 |
| Устройство для передачи грузов | 1973 |
|
SU506538A1 |
fB 3 ,7 // « /4/7/32ff/9
