2,Механизм по п. К отличающийся тем, что изгибающие пластины верхнего и нижнего транспортеров установлены с возможностью взаимного перекрытия,
3.Механизм по пп. I и 2, о тл и ч а ю щ и и с я тем, что изгибающие пластины каждого из рядов смонтированы на соответствующих транспортерах посредством опорных элементов, расположенных по торцам ряда, шарнирно смонтированных на
звеньях цепи и имеющих пазы для прохода осей соответствующих изгибающих пластин, при этом каждая из осей подпружинена к соответствующим опорным пластинам.
4. Механизм по пп. 1-3, отличающийся тем, что дополнительно имеет упор из упругого материала, расположенный у основания открытых пазов изгибающих пластин каждбго ряда.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прокладывания уточных нитей к многозевному пневматическому ткацкому станку | 1985 |
|
SU1452868A1 |
| Ткацкий станок | 1981 |
|
SU1083652A1 |
| Ткацкий станок с волнообразно-подвижным зевом | 1981 |
|
SU1144621A3 |
| Отмеривающий механизм к бесчелночному ткацкому станку | 1973 |
|
SU486094A1 |
| Ткацкий станок с волнообразно подвижным вдоль основных нитей зевом | 1979 |
|
SU1001865A3 |
| Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом | 1980 |
|
SU973679A1 |
| Способ отмеривания уточных нитей на многозвенном пневматическом ткацком станке и устройство для его осуществления | 1984 |
|
SU1348411A1 |
| Способ формирования ткани на бесчелночном ткацком станке | 1987 |
|
SU1416548A1 |
| Ремизка зевообразующего механизма ткацкого станка для выработки трехмерных тканей | 1976 |
|
SU973032A3 |
| Механизм подачи уточной нити к зажимному прокладчику на ткацком станке | 1982 |
|
SU1048010A1 |
1. Зевообразующий механизм бесчелночного ткацкого станка, содержащий расположенные один под другим в направлении перемещения основных нитей вертикально замкнутые цепные транспортеры с поперечными относительно направления перемещения основных нитей рядами пластин для изгиба основных нитей, имеющих открытые пазы для прохода уточных нитей, отличающийся тем, что, с целью повыщеиия качества вырабатьшаемой ткани, он дополнительно имеет неподвижные копиры для развода в вертикальной плоскости изгибающих пластин, размещенные внутри транспортеров и в зоне их рабочих ветвей, при этом изгибающие пластины каждого из рядов соединены между собой посредством оси, установленной с возможностью перемещения в вертикальной плоскости и подпружиненной к соответствующему ну цепи т|5анспортера. Фиг.1
1
Изобретение относится к ткацкому машиностроен1-1ю, касается механизма зевообразования бесчелночного ткацкого станка и может быть использовано для зевообразовання.в металлоткацких станках, например, для изготовления металлических сеток.
; Цель изобретения - повьшгение качества вьфабатываемой ткани.
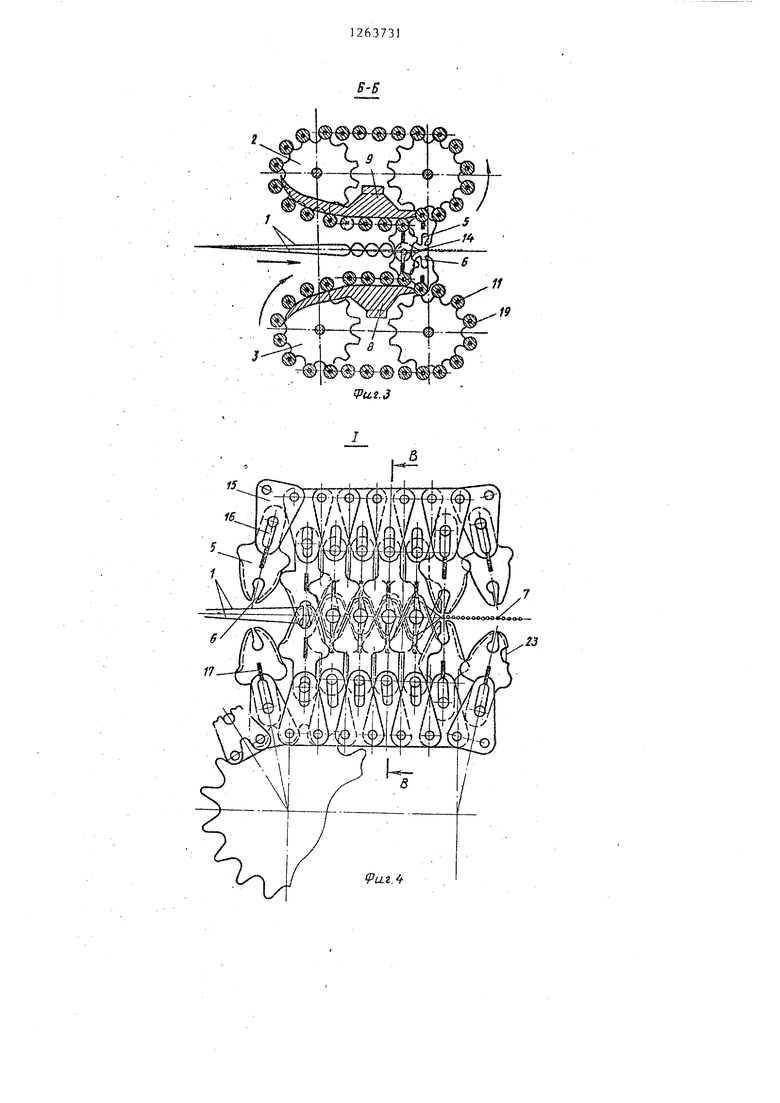
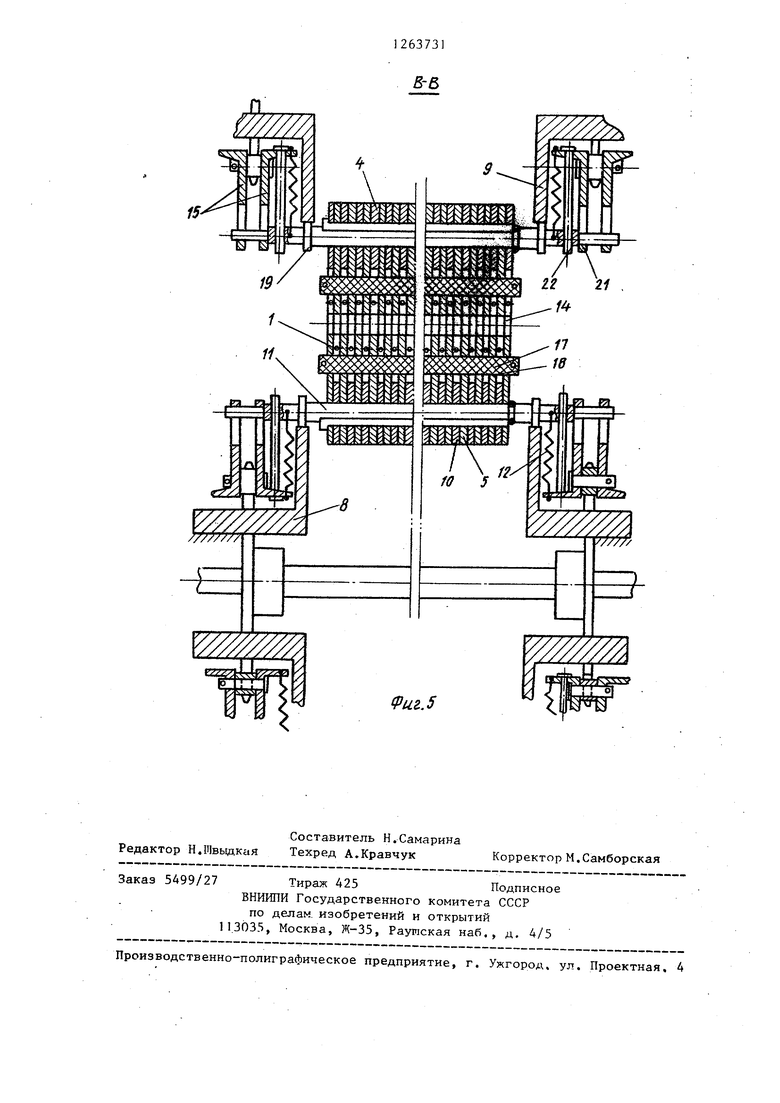
На фиг, 1 изображен зевообразующий механизм, общий вид на фиг, 2разрез А-А на фиг. ; на фиг. 3 разрез Б-Б на фиг. 2; на фиг, 4 узел I на фиг. Ij на фиг, 5 - разрез В-В на фиг, 4.
Зевообразующий механизм содержит расположенные один под другим в направлении перемещения основных нитей. 1 вертикально замкнутые цепные транспортеры 2, 3с поперечными относительно направления перемещения основных нитей 1 рядами 4 изгибающих пластин .5 для изгиба основных нитей 1, имеющих открытые пазы 6 для прохода уточньк нитей 7. Внутри .транспортеров 2, 3 в зоне их рабочих ветвей установлены копиры 8, 9. Изги шощие пластины 5 каждого ряда 4 соединены между собой с установ:кой между Ними дистанционных колец 10 посредством оси 11, Каждый ряд 4 подпружинен пружиной 12 к соответствующему звену,13 цепи транспортера 2, 3. Изгибающие пластины 5 верхнего и нижнего транспортеров 2, 3 установлены с возможностью перекрытия и образования каналов 14 для прокладывания уточной нити. Звенья 13 ц§2
пей транспортеров 2, 3 выполнены в виде опорных пластин 15, которые снабжены пазами 16 для прохода в них осей 11. Открытые пазы 6 изгибающих пластин 5 каждого ряда 4 дополнительно снабжены упором 17 из упругого материала, который установлен в отверстиях 18. На осях 11 установлены ролики 19, которые периодичес-
ки контактируют с копирами 8, 9 за счет прукдан 12.
Опорные пластины 15 шарнирно смонтированы на звеньях 13 цепей 20, Одновременно для обеспечения верти-
кального перемещения оси 11 с изгибающими пластинами 5 ряда 4, ось 11 снабжена отверстиями 21 с двух сторон, в которые установлены стержни 22, жестко закрепленные на опорных
пластинах 15. Пружины 12 растяжения также закреплены на опорных пластинах 15 с одной стороны и на осях 11 с другой стороны.
Для обеспечения надежного скольжения нити 1 основы по периметру изгибающих пластин 5 вьтолнены желобки 23, Транспортеры 2, 3 имеют привод 24 „ Зевообразующий механизм работает
следующим образом.
При отведенном вверх верхнем транспортере 2 производят заправку нитей основы 1, устанавливая их параллельно в желобки 23 изгибающих
пластин. Далее устанавливают и за репляют верхний транспортер 2 в рабочем положении, при котором происходит изгиб нитей 1 основы изгибающими пластинами 5, при этом нити попадают в их желобки 23.
Включают привод.24 замкнутых цепных транспортеров 2, 3, обеспечивая их синхронную линейную скорость.
При движении транспортеров в направлении перемещения основных нитей происходит скольжение нитей 1 в желобках 23 изгибающих пластин 5, В начале цикла расположенные по обе стороны основных нитей один под . другим замкнутые цепные транспорте:ры 2, 3 изгибают основные нити 1 с помощью рядов А установленных на осях 11 изгибающих пластин 5 и дистанционных колец 10. Оси 11 в зоне рабочих ветвей транспортеров роликами 19 под «симаются к соответствующим копирам 8, 9, увеличивая растяжение пружин 12. При этом оси 11 верхнего и нижнего транспортеров образуют двухярусный ряд 4, где каждая изгибающая пластина 5 входит в пространство, образованное двумя внутренними торцами смежных изгибающих пластин 5 и внешней поверхностью дистанционного кольца 10 и создают
взаимное перекрытие открытых пазов 6 с помощью упоров 17 из упругого материала, замыкающих открытые пазы 6 с двух сторон, образуя каналы 14 для проброса и прохода уточной нити 7. В таком состо;1нии оси 11 перемещаются роликами 19 по прямой обвода копиров 8, 9 в зоны, где копиры имеют вертикальный участок, оси 11
o мгновенно расходятся под действием усилий пружин, оставляя уточную нить в основе. При разводе осей 11 они скользят в пазах 16 опорных пластин 15 и одновременно в отверстиях 21 стержней 22.
5
Скорости движения основных нитей и транспортеров должны удовлетворять заданной плотности уточной нити.
С помощью предлагаемого зевооб0разующего механизма можно повысить качество ткани и повысить надежность работы за счет обеспечения непрерывных процессов без вибрации нитей основы и постоянного чистого зева, что снижает обрывность основньгх нитей.
15
| ВЕТРОВАЯ ЭЛЕКТРОСТАНЦИЯ С ВЕРТИКАЛЬНОЙ ДВУХСТУПЕНЧАТОЙ ВИХРЕВОЙ АЭРОТУРБИНОЙ С ЦЕНТРОБЕЖНЫМИ ОГРАНИЧИТЕЛЯМИ СКОРОСТИ ВРАЩЕНИЯ АЭРОТУРБИНЫ | 2008 |
|
RU2392489C1 |
