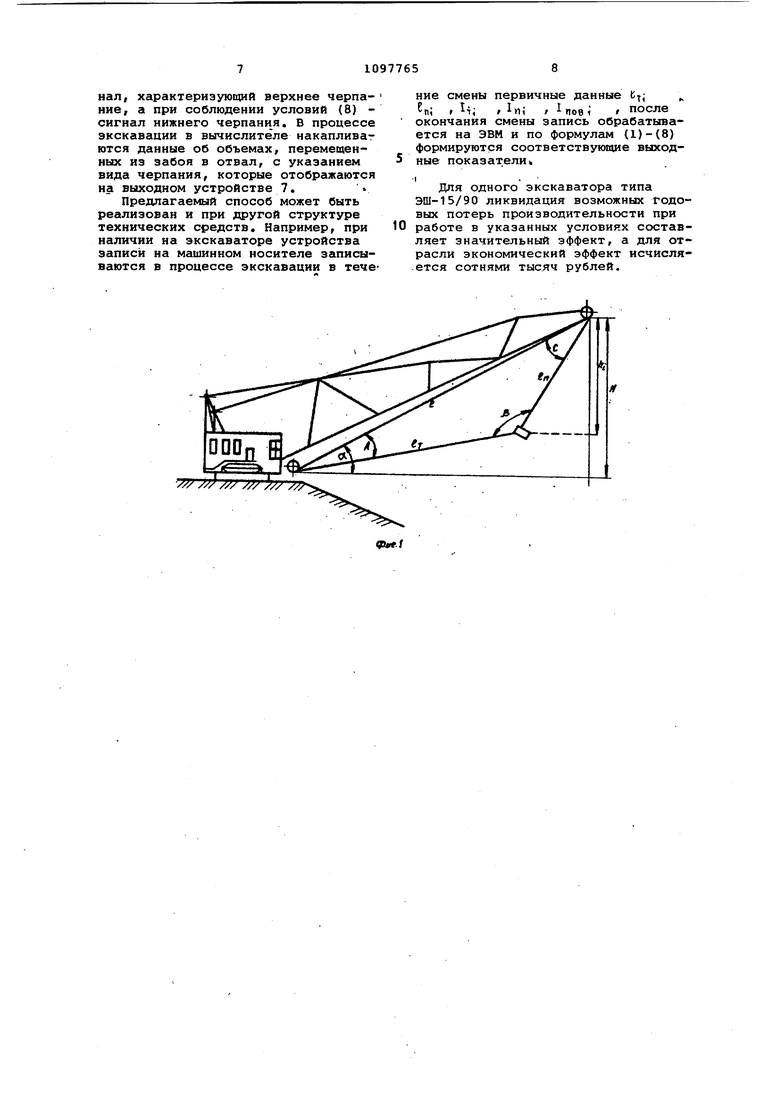
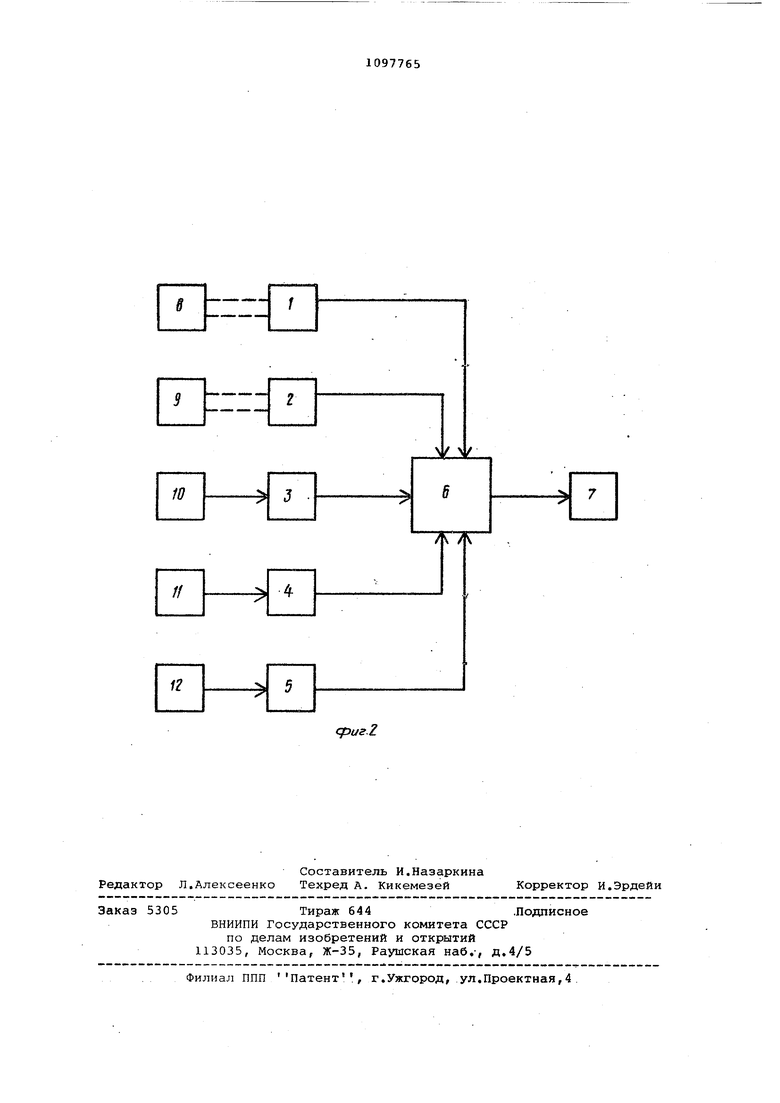
Изобретение относится к измерен параметров выполненной работы при проведении горных работ открытым способом с применением экскаваторо драглайнов, а точнее к измерению к личества перемещенной горной массы из забоя в отвал с учетом вида чер пания. Известны различнгле способы изме рения основных паргилетров работы драглайнов, в том числе измерения количества перемещенной горной масс из забоя в отвал. Известен способ, обеспечивающий автоматический учет основных показателей работы, в том числе контрол и учет количества горной массы, пе ремещенной в каждом цикле экскаваци который основан на контроле тока двиг теля подъема ковша, угла поворота платформы,операции разгрузки ковша, длий тягойых и подъемных канатов и соп ставления последних со значениями длин, соответствующих нахождению Ковша на линии саморазгрузки. Спосо обеспечивает учет нарастакнцим итогом количества перемещенной горной массы из забоя в отвал ij . Однако при этом не предусматрива ется дифференциация перемещенных объемов в зависимости от вида черпания (с верхним или с нижним черпа нием) . В связи с тем, что производитель ность драглайна существенно зависит от вида черпания - производительность при нижнем черпании на 10-30% выше, чем производительность при при определе верхнем черпании НИИ количества перемещенной горной массы для обеспечения объективности учета необходимо учитывать вид черп ния. Известен также способ з , который обеспечивает определение веса ковша экскаватора-драглайна по вели чине усилий в тяговом и подъемном канатах с учетом координат ковша в пространстве, определяемых измерени ем длины тягового каната по форвлуле с, О е ч ( , где Р - вес ковша; усилия в подъемном и тяговом канатах; |U - коэффициент пропорциональности, В свою очередь cos e-cpTbcos e+ fni f . 9irt(cpn + где - угол наклона стрелы экскаватора к горизонту; угол между подъемным канатом и стрелой экскаватора;Cfr - угол между тяговым канатом и стрелой экскаватора. Однако при этом также не учитывается вид черпания при определении количества перемещенной горной массы из забоя в отвал, что снижает объективность оценки выполненной работы. Наиболее близким к предлагаемому по технической сущности является способ измерения количества работы, выполненной экскаватором- драглайном, основанный на определении количества горной массы, переменной в каждом цикле экскавации, путем измерения длин тягового и подъемного канатов, токов якорных цепей двигателей механизмов подъема и тяги ковша 4j . Однако и этот способ не обеспечивает дифференцированного учета количества перемещенной горной массы в зависимости от вида черпания. Цель изобретения - повышение точности измерения за счет обеспечения раздельного учета работы, выполненной с верхним и нижним черпанием. Поставленная цель достигается тем, что согласно способу измерения количества работы, выполненной экскаватором-драглайном, включающему определение количества горной массы, перемещенной в каждом цикле экскавации, путем измерения длин тягового и подъемного канатов, токов якорных цепей двигателей механизмов подъема и тяти ковша, измеряют ток якорной цепи двигателя механизма поворота, определяют в процессе заполнения ковша средние значения токов якорных цепей двигателей механизмов подъема, тяги и поворота, текущее значение проекции свисающей части подъемного каната на вертикальную ось, задают границу между верхним и нижним черпанием, сравнивают ее с текущим значением проекции свисакяцей части подъем- . ного каната иа вертикальную ось, определяют выполнение условий ITCO/ ЬО 1/5)1тмом 5 incp (0,1 03), 1аоЗс( (01 InoBKOMгДе1т,рДт -средний ток якорной Тер цепи двигателя механизма тяги при загрузке ковша и номинальный соответственно;-средний ток якорной Пср tn НОМ цепи двигателя механизма подъема при загрузке ковша и номи нальиый соответственно;Inoecp noeMoi; средний ток якорной цепи двигателя меха низма поворота плат формы при загрузке ковша и номинальный соответственно, и если при этом текущее значение про екции свисающей части подъемного каната на вертикальную ось не больше заданной границы между верхним и нижним черпанием, то цикл экскавации считают выполненным с верхним черпанием, если текущее значение про екции свисающей части подъемного каната на вертикальную ось больше заданной границы между верхним и нижним черпанием, то цикл экскавации считают выполненным с нижним черпанием, а количество работы, выполненной экскаватором-драглайном, определяют раздельной суммарной величиной горной массы, перемещенной в циклах экскавации с верхним и нижним черпанием. Действительно, из тригонометричес ких соотношений следует, что длина проекции свисающей части подъемного каната на вертикальную ось равна Ь,Е ;-С05(ЯО.(4-С, Если h; i И , где Н Е gin л , то ковш заполняется выше горизонтального положения тягового каната,т.е. имеет место заполнения ковша с верхним черпанием, если hi Н , то имеет место нижнее черпание. Дополнительные условия (1,0 - 1,5)1,„„ 1„ (0,1 - 0,3)1„„, Inoec,0l - 03)1.овном позволяют надежно определить окончание процесса заполнения ковша путем использования принципа интегральной оценки, который нечувствителен к воз мущающим воздействиям случайного характера (кратковременные коммутации главных приводов экскаватора, колебания величины сопротивления резанию горной массы и т.п.) . Условие а фактически определяет окончание процесса заполнения ковша, условия S , Ь .- ограничения, при которых осущест вляется процесс заполнения ковша. Таким образом, в каждом цикле экс кавации может быть сформирован признак, характеризующий вид черпания. На фиг. 1 показана схема для опре деления основных соотношений; на фиг. 2 - структурная схема устройства, регшизукяаего способ измерения количества перемещенной горной массы экскаватором-драглайном. Устройство .содержит датчики длины тягового каната 1, длины подъемного каната 2, тока якорной цепи двигателя механизма тяги ковша 3, тока якор ной цепи двигателя механизма подъема ковша 4 J тока якорной цепи двигателя механизма поворота платформы 5, вычислитель 6 и выходное устройство 7. Датчики 1 и 2 связаны механически соответственно с валами редукторов тяговой 8 и подъемной 9 лебедок. Датчики 3-5 подключены входами к якорным цепям двигателей 10, 11 и 12 механизмов тяги и подъема ковша и поворота платформы соответственно, а выхода- I ми - к вычислителю 6. Выходы датчиков 1 и 2 подключены также к входам вычислителя 6, выход которого связан с выходным устройством 7. Предлагаемый способ включает следующие основные операции: 1.Измерение длин свешивающихся частей подъемного fni и тягового tti канатов соответствующими датчиками, связанными, например, с валами редукторов подъемной и тяговой лебедок. . 2.Измерение токов в якорных цепях двигателей механизмов подъема ковша In; , тяги IT; , поворота платформы tnoei3.Определение массы движущегося ковша по величине якорного тока двигателя механизма подъема с учетом положения ковша в -пространстве, режима работы двигателя и уровня динамической составляющей тока якорной цепи, являющейся следствием возмущающих воздействий выходных сигналов командо-аппарата управления двигателя механизмов подъема, т.е.Р,- i определяется ,со5(2об-е;-АП .. id) р. . 1 .,-tm где А; - угол между струной тягового каната и прямой 2 , проведенной через точки схода тягового и подъемного канатов с направляющими шкивов. и-Еп; ет;Нс еп - т;иеп;-еат,у Ai 2arcig Е.е,ге„; с, - угол между струной подъемного каната РП| и прямой , проведенной через точки cxo да тягового и подъемного, ка натов с направляющих шкивов, „Ке-еп; Ьт;КЕ т-еп«кеп;-е етО „ ,, ьвпие . . - - ЩШ-t r «.Const- острый угол наклона 8 , проведенный через точки схода тягового и подъемно1 о канатов с направляющих шкивов к горизонтальной плоскости k - коэффициент пропорциональности между током якорной цепи двигателя механизма подъема ковша и массой ков ша, зависящий от. параметро двигателя и режима его работы. При этом длительность интервала интегрирования1п,„ - t „ принимается 0,1-1,0 с; п - число интервалов ин тегрирования, определяемое длитель ностью интервала интегрирования , И длительностью перемещения взвешиваемого ковша в пространстве Нахождение массы движущегося ко ша Р; производится ПрИ УСЛОВИИ c05tg«.-C,An со5(о(-АП (2) .ср tm , TYltO M где 6 - допустимая величина изменения tni на интервале lYi + f - m При ЭТОМ допустимая величина 0 изменения „; на интервале принимается в пределах (0,05-0,2)1 г Формирование сигнала Р; обеспечи вается при перемещении груженого ко шаРрр, и при перемещении порожнего ковша Ррор,; ..Масса, перемещенная из забоя в отвал в цикле экскавации (масса нетто), определяется по форм ле PHI f i -Pn,,f,.i 4. Измерение среднего тока якорной цепи двигателя механизма тяги при заполнении ковша 1 I.,dt .Г -тЬТ; время интегрирования, которое принимается в зависимое ти от типа экскаватора в пределах 1-10 с, т.е. в пре делах длительности заполнения ковша; ( - число интервалов интегрирования длительностью tp,t,--tfn 5. Измерение среднего тока якорной цепи двигателя механизма подъема ковша при его заполнении imt а J пГ (5) 6, Измерение среднего тока цепи двигателя механизма поворота платформы при заполнении ковша т.е. условия (4)-(6) обуславливают измерение соответствующих параметров при установленном уровне затухания переходных процессов. 7. Проверка выполнения условий (7), при их соблюдении считают, что в данном цикле экскавации имеет место верхнее черпание: Ь; Е Sin л 1 (1,0 - 1,5)1, С (0,1 - о,э)Гп, n f J ПKo л ij,u (0,1 - o,3) где h; - проекция свешивающейся части подъемного каната на вертикальную плоскость. 8. Проверка выполнения условий (8), при их соблюдении считает, что в данном цикле экскавации имеет место нижнее черпание: Ь; 5tn оО 1.(1.0 - 1,5)1,,„ 1 (0,1 - 0,3 Тпио« / (8) (Ol - 03)1„о,„„„ Таким образом, в каждом цикле экскавации формируется признак вида черпания: нижнее или верхнее. Устройство работает следующим образом. При заполнении ковша горной массой в забое датчики 1 и Е формируют сигналы, характеризующие длины свисающих частей тягового Cjj и подъемного ЕП,- канатов. На выходах датчиков 3-5 формируются сигналы, характеризующие загрузку якорных цепей двигателей механизмов тяги IT; подъема 1у, ковша и поворота платформы . Выходные сигналы датчиков 1-5 поступают в вычислитель б, в котором вычисляются средние значения токов якорных цепей двигателей механизмов тяги ковша 1тср формула (4) , подъема ковша IПер - формула (5), поворота латформы1то9.5р-Формула (6) .Проверяется выполнение условий 7-8 и формируется соответствующий сигнал. После заполнения ковша в процессе его перемеще-. ния из забоя в отвал вычислитель 6 определяет массу ковша - формулы (1) и (4) при выполнении условия (2).После разгрузки ковша вычислителем обеспечивается повторная операция определения массы порожнего ковша формула (1) и определяется масса (нетто), перемещенная в цикле экскавации, по формуле (4). При соблюдении условий (7) формируется сигнал, характеризующий верхнее черпание, а при соблюдении условий (8) сигнал нижнего черпания. В процессе экскавации в вычислителе накапливаг ются данные об объемах, перемещенных из забоя в отвал, с указанием вида черпания, которые отображаются на выходном устройстве 7.
Предлагаемый способ может быть реализован и при другой структуре технических средств. Например, при наличии на экскаваторе устройства записи на машинном носителе записываются в процессе экскавации в течение смены первичные данные
п; f IT; I 1ц; / Inoei после окончания смены запись обрабатывается на ЭВМ и по формулам {1)-(8) формируются соответствующие выход5 ные показатели,
I
Для одного экскаватора типа
ЭШ-15/90 ликвидация возможных годовых потерь производительности при 10 работе в указанных условиях составляет значительный зффект, а для отрасли экономический эффект исчисля-ется сотнями тысяч рублей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
СПОСОБ ИЗМЕРЕНИЯ КОЛИЧЕСТВА РАБОТЫ, ВЫПОЛНЕННОЙ ЭКСКАВАТОРОМДРАГЛАЙНОМ, в ключ аниций определение количества горной массы, перемещенной в каждом цикле экскавации, путем измерения длин тягового и подъемного канатов, токов якорных цепей двигателей механизмов подъема и тяги ковша, отличающийся тем, что, с целью повышения точности измерения за счет обеспечения раздельного учета работы, выполненной с верхним и нижним черпанием, измеряют ток якорной цепи двигателя механизма поворота, определяют в процессе заполнения ковша средние значения токов якорных цепей двигателей механизмов подъема, тяги, и поворота, текущее значение проекции свисающей части подъемного каната на вертикальную ось, задах границу между верхним и нижним черпанием, сравнивгиот ее с текущим значением проекции свисающей части подъемного каната на вертикальную ось, определяют выполнение условий
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Теория и практика бестранспортной системы открытой разработки месторождений | |||
| Киев, Вища школа, 1973, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
