сокого и низкого давления, трехпози- ционный гидрораспределитель (ГР) с управляющими элементами, выполненными на базе электромагнитов (ЭМ) 17 и 18, гидроцилиндры управления рабочим органом, центральный регулятор 28, аналого-дискретный преобразователь с ползуном 27 и прерывателем 526 сигналов. Последний выполнен в виде электросистемы с электровыключателями (ЭВ) 21-25, блоками 19 и 20 задержки сигналов и двухпозиционным электропереключателем 29 режимов работы. Источник гидроэнергии выполнен из группы насосов, к которым подключены напорные гидролинии, и имеющих управляющие ЭМ 7-9 двухпозиционных
Изобретение относится к системам автоматического управления рабочим органом землеройно-транспортнык Мс1- шин и может быть использовано на скреперах, бульдозерах и других землерой- ных машинах.
Целью изобретения является повышение производительности машины и снижение динамических нагрузок на ее оборудование .
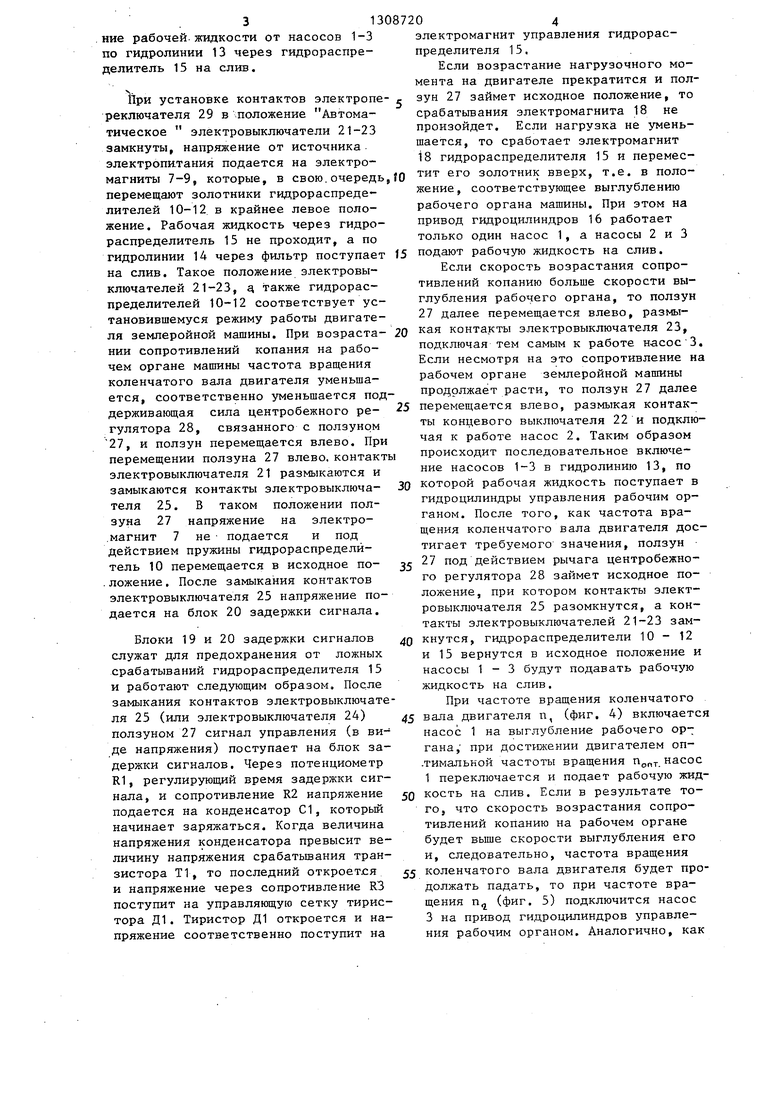
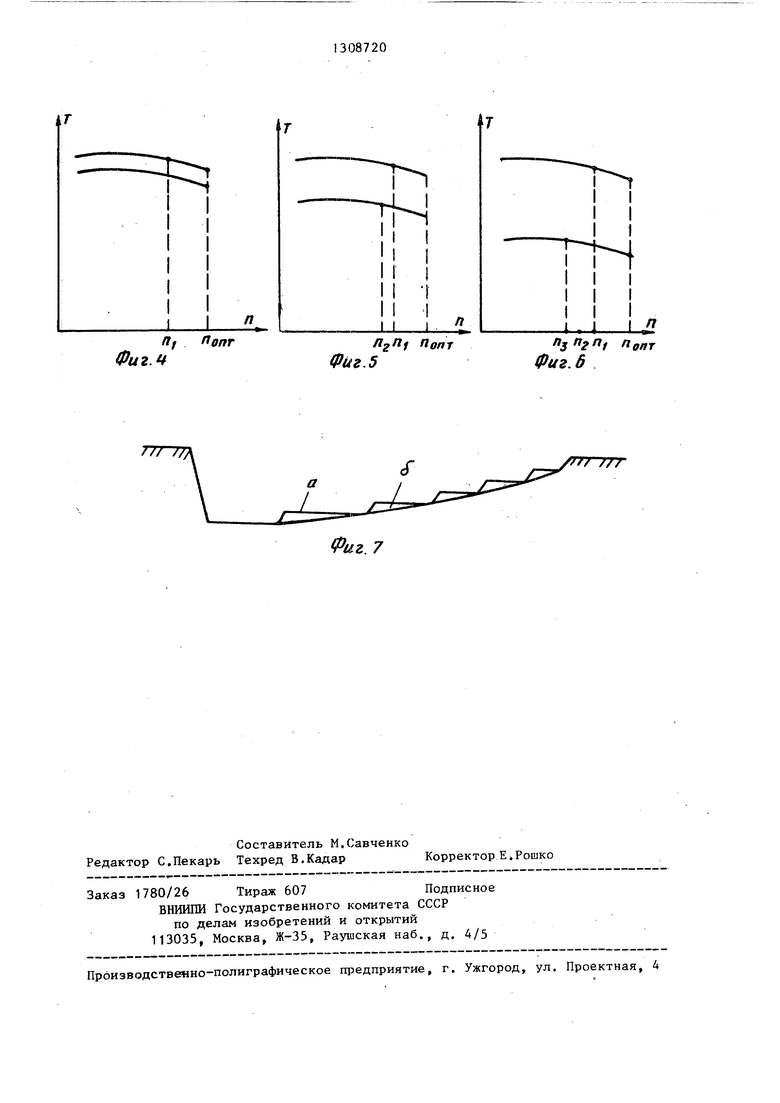
На фиг. 1 изображена схема гидропривода зег Шеройной машины; на фиг,2 - электромеханическая схема управления работой гидрораспределителей, на фиг 3 - блок задержки сигналов уп- равления; на фиг. 4-6 - тяговые характеристики землеройной машины на первой передаче; на фиг. 7 - оптимальные траектории движения рабочего органа землеройной машины в процессе копания грунта.
Устройство для автоматического управления рабочим органом землеройной машины содержит (фиг. 1) источник гидроэнергии, выполненный из насосов Т -З, к которым подключены напорные гидролинии 4-6 насосов, и имеющих управляющие электромагниты 7-9 двухпозиционных гидрораспределителей 10- 12, которые выполнены с возможностью сообщения каждой напорной гидролинии с гидролиниями высокого 13 и низкого 14 давления, сообщенными через трех- позиционный гидрораспределитель 15
08720
ГР, При установке злектропереключа- теля 29 в положение Ручное ЭМ 7-9, 17, 18 обесточеныg а все ГР находятся в положении, обеспечивающем свободное прохождение рабочей жидкости от насосов источника энергии через трехпозиционный.ГР с ЭМ 17, 18 на слив. При установке электропереключателя 29 в положение Автоматическое ЭВ 21-23 замкнуты, напряжение подается на ЭМ 7-9. Они перемещают золотники двухпозиционных ГР посредством ЗМ 7-9 в крайнее левое положение. Рабочая жидкость через трех- позиционный ГР не проходит и по гнд- ролинии низкого давления через фильтр поступает на слив. 7 ил.
с гидроцилиндрами 16 управления рабочим органом, Трехпозиционньш гид- рораспределитель 15 снабжен управляющими элементами, выполненными на базе электромагнитов 17 и 18. Электромагниты 7-9 непосредственно, а электромагниты 17 и 18 через блоки 19 и 20 задержки сигналов злектри- чески связаны с электровыключателями 21-25 электросистемы прерывателя 26 сигналов, в направляющих которого перемещается ползун 27, кинематически связанный с центробежным регулятором 28 (фиг. 2). В электроцепи электросистемы установлен двухпози- ционный электропереключатель 29 ре- зкимов работы. Блоки 19 и 20-задержки сигналов состоят каждый (фиг. 3) из потенциометра R1, регулирующего величину времени задержки, сопротивлений R2, R3, R4, R5, R6, конденсаторов С1 и С2, транзистора Т1 и тиристора Д1 .
Устройство для автоматического управления рабочим органом землеройной машины работает следующим образом.
При установке двухпозиционного злектропереключателя 29 в положение Ручное электромагниты 7-9, 17 и 18, управляющие гидрораспредёлителя- ми, обесточены. Гидрораспределители 10-12 и 15 находятся в положении, обеспечивающем свободное прохождение рабочей-жидкости от насосов 1-3 по гидролинии 13 через гидрораспределитель 15 на слив.
При установке контактов электропе- реключателя 29 в положение Автоматическое электровыключатели 21-23
Если возрастание нагрузочного момента на двигателе прекратится и ползун 27 займет исходное положение, то срабатьгаания электромагнита 18 не произойдет. Если нагрузка не уменьшается, то сработает электромагнит 18 гидрораспределителя 15 и перемесзамкнуты, напряжение от источника электропитания подается на электромагниты 7-9, которые, в свою, очередь, tO золотник вверх, т.е. в поло- перемещают золотники гидрораспределителей 10-12 в крайнее левое положение. Рабочая жидкость через гидрораспределитель 15 не проходит, а по
жение, соответствующее выглублению рабочего органа машины. При этом на привод гидроцилиндров 16 работает только один насос 1, а насосы 2 и 3 гидролинии 14 через фильтр поступает 15 подают рабочую жидкость на слив, на слив. Такое положение электровы- Если скорость возрастания сопро- ключателей 21-23, а, также гидрорас- тивлений копанию больше скорости вы- пределителей 10-12 соответствует ус- глубления рабочего органа, то ползун тановившемуся режиму работы двигате- 27 далее перемещается влево, размы20
ля землеройной машины. При возрастании сопротивлений копания на рабочем органе машины частота вращения коленчатого вала двигателя уменьшается, соответственно уменьшается подкая контакты электровыключателя 23, подключая тем самым к работе насос 3. Если несмотря на это сопротивление на рабочем органе землеройной машины продолжает расти, то ползун 27 далее
держивающая сила центробежного ре- 25 перемещается влево, размыкая контак- гулятора 28, связанного с ползуном ™ концевого выключателя 22 и подклю- 27, и ползун перемещается влево. При ч работе насос 2. Таким образом перемещении ползуна 27 влево, контакты происходит последовательное включе- электровыключателя 21 размыкаются и и® насосов 1-3 в гидролинию 13, по
30
замыкаются контакты электровыключателя 25. В таком положении ползуна 27 напряжение на электро- .магнит 7 не подается и под действием пружины гидрораспределй- тель 10 перемещается в исходное по- .ложение. После замыкания контактов электровыключателя 25 напряжение подается на блок 20 задержки сигнала.
Блоки 19 и 20 задержки сигналов служат для предохранения от ложных срабатываний гидрораспределителя 15 и работают следующим образом. После замыкания контактов электровыключателя 25 (или электровыключателя 24) ползуном 27 сигнал управления (в ви- де напряжения) поступает на блок задержки сигналов. Через потенциометр R1, регулирующий время задержки сигнала, и сопротивление R2 напряжение подается на конденсатор С1, который начинает заряжаться. Когда величина напряжения конденсатора превысит величину напряжения срабатьшания транзистора Т1, то последний откроется и напряжение через сопротивление R3 поступит на управляющую сетку тиристора Д1. Тиристор Д1 откроется и напряжение соответственно поступит на
которой рабочая жидкость поступает в гидроцилиндры управления рабочим органом. После того, как частота вращения коленчатого вала двигателя достигает требуемого значения, ползун 5г 27 под действием рычага центробежного регулятора 28 займет исходное по40
ровыключателя 25 разомкнутся, а контакты электровыключателей 21-23 замкнутся, гидрораспределители 10 - 12 и 15 вернутся в исходное положение и насосы 1 - 3 будут подавать рабочую жидкость на слив.
При частоте вращения коленчатого
45 вала двигателя п, (фиг. 4) включается насос 1 на выглубление рабочего органа, при достгокении двигателем оп- .тималькой частоты вращения Пд, насос 1 переключается и подает рабочую жид50 кость на слив. Если в результате того, что скорость возрастания сопротивлений копанию на рабочем органе будет выше скорости выглубления его и, следовательно, частота вращения
55 коленчатого вала двигателя будет продолжать падать, то при частоте вращения п (фиг. 5) подключится насос 3 на привод гидроцилиндров управления рабочим органом. Аналогично, как
электромагнит управления гидрораспределителя 15.
Если возрастание нагрузочного момента на двигателе прекратится и ползун 27 займет исходное положение, то срабатьгаания электромагнита 18 не произойдет. Если нагрузка не уменьшается, то сработает электромагнит 18 гидрораспределителя 15 и перемес золотник вверх, т.е. в поло-
жение, соответствующее выглублению рабочего органа машины. При этом на привод гидроцилиндров 16 работает только один насос 1, а насосы 2 и 3 подают рабочую жидкость на слив, Если скорость возрастания сопро- тивлений копанию больше скорости вы- глубления рабочего органа, то ползун 27 далее перемещается влево, размыкая контакты электровыключателя 23, подключая тем самым к работе насос 3. Если несмотря на это сопротивление на рабочем органе землеройной машины продолжает расти, то ползун 27 далее
перемещается влево, размыкая контак- ™ концевого выключателя 22 и подклю- ч работе насос 2. Таким образом происходит последовательное включе- и® насосов 1-3 в гидролинию 13, по
которой рабочая жидкость поступает в гидроцилиндры управления рабочим органом. После того, как частота вращения коленчатого вала двигателя достигает требуемого значения, ползун 27 под действием рычага центробежного регулятора 28 займет исходное по
ровыключателя 25 разомкнутся, а контакты электровыключателей 21-23 замкнутся, гидрораспределители 10 - 12 и 15 вернутся в исходное положение и насосы 1 - 3 будут подавать рабочую жидкость на слив.
При частоте вращения коленчатого
вала двигателя п, (фиг. 4) включается насос 1 на выглубление рабочего органа, при достгокении двигателем оп- тималькой частоты вращения Пд, насос 1 переключается и подает рабочую жидкость на слив. Если в результате того, что скорость возрастания сопротивлений копанию на рабочем органе будет выше скорости выглубления его и, следовательно, частота вращения
коленчатого вала двигателя будет продолжать падать, то при частоте вращения п (фиг. 5) подключится насос 3 на привод гидроцилиндров управления рабочим органом. Аналогично, как
и в первом случае, при достижении точки п насосы 1 и 3 переключатся на слив. Если после включения двух насосов частота вращения коленчатого, вала двигателя будет продолжать падать и достигнет величины п (фиг 6), то на выглубление рабочего opra-i на будут работать все три насоса. В момент, когда будет достигнута точка rfoitr. насосы переключатся на слив.
На фиг. 7 изображены оптимальные траектории движения рабочего органа машины при копании грунта: & - при работе оператора; S - при работе системы для автоматического управления рабочим органом землеройной машины,
Использование предлагаемого устройства для автоматизации рабочего процесса землеройной машины позволяет повысить производительность машины за счет снижения пути наполнения повысить надежность за счет снижения динамических нагрузок, действующих на рабочий орган, при заглублении и выглублении, стабилизации загрузки вигателя в узком диапазоне, эконо- мии топлива за счет работы двигатея в номинальном режиме. Все это приводит к увеличению межремонтной наработки и общему повышению производительности.
е -.
Формула изобретения
Устройство для автоматического управления рабочим органом землеройной машины, содержащее источник гидро
to
08720 6
энергии, гидролинии высокого и низкого давления, трехпозиционньй гидрораспределитель с управлянацими эле-- ментами, гидроцилиндр, центр обежный
5 регулятор и аналого-дискретный пре- образователь с. размещенным в направ- ляющих и кинематически связанным с центробежным регулятором ползуном и с прерывателем сигналов, соединенным с управляющими элементами трехпози- ционного гидрораспределителя, о/т - личающееся тем, что, с целью повьшения производительности машины и снижения динамических наJ5 грузок на ее оборудование, прерыватель сигналов выполнен в виде электросистемы с электровыключателями, блоками задержки сигналов и двухпо- зиционным электропереключателем ре20 жимов работы, а источник гидроэнергии выполнен из группы насосов и имеющих управляющие .электромагниты двухпозиционных гидрораспределителей, к которым подключены напорные гидролинии насосов и которые выполнены с возможностью сообщения каждой напорной гидролинии с гидролиниями высокого и низкого давления, при этом управляющие электромагниты
0 двухпозиционнык гидрораспределителей и управляющие элементы трехпозицион- ного гидрораспределителя подключены каждый к своему электровыключателю, а блоки задержки сигналов подключены
35 к электроцепи электросистемы на участке между электровыключателями и управляющими элементами трехпозици- онного гидрораспределителя.
25
U
л
аг. 1
0 +
.5
П
Пот
Фиг.5
поат Фиг. 6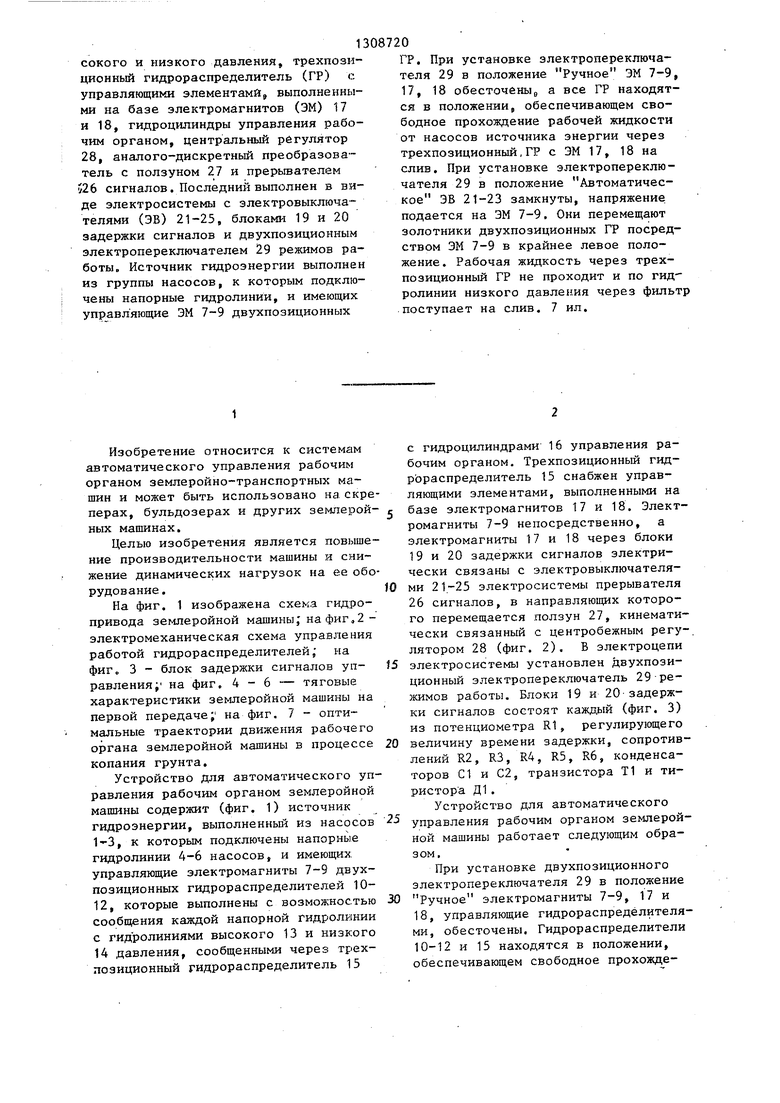
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Гидропривод экскаватора | 1987 |
|
SU1444483A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1745844A1 |
| Устройство управления рабочим органом землеройной машины | 1987 |
|
SU1463878A1 |
| Кабелеукладчик | 1988 |
|
SU1564287A1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Гидропневматическое амортизирующее устройство землеройно-транспортной машины | 1986 |
|
SU1460148A1 |
| Система управления землеройно-транспортной машины | 1987 |
|
SU1444485A1 |
| Бульдозер | 1986 |
|
SU1560687A1 |
| Гидромеханический ходоуменьшитель землеройной машины | 1983 |
|
SU1089214A1 |
Изобретение относится к автоматизации землеройно-транспортных машин и может быть использовано на скреперах, бульдозерах и других машинах. Целью изобретения является повышение производительности машины и снижение динамических нагрузок на ее оборудование. Устройство содержит источник гидроэнергии, гидролинии выРдчное . 29 28 J (Л 00 СХ) to Риг.г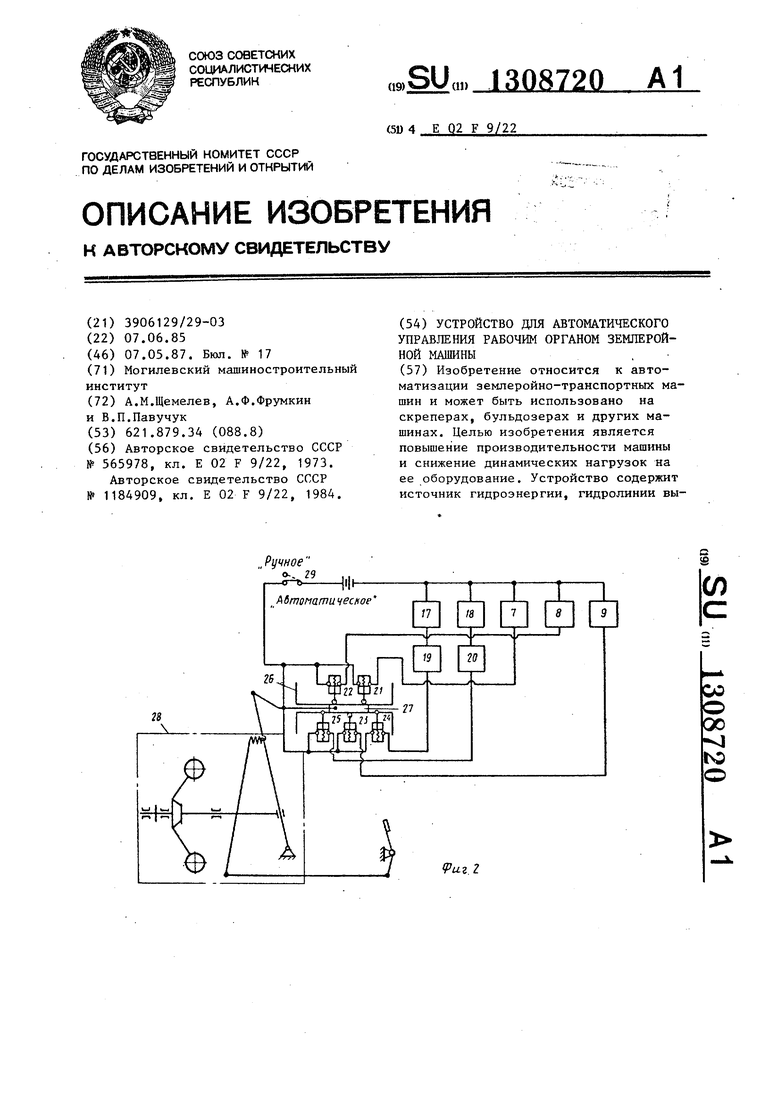
Фиг. 7
| Система управления рабочим органом землеройно-транспортных машин | 1973 |
|
SU565978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления рабочим органом землеройной машины | 1984 |
|
SU1184909A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
