.t Изобретение относится к приборостроению, в частности к автоматизации управления подвижными объектами, и может найти применение при создании систем автоматической ориентации горных самоходньк машин при задании опорного направления с помощью токонесущего проводника. Целью изобретения является повыше ние точности контроля положения горной машины. На фиг.1 представлена блок-схема устройства; на фиг.2 - дополнительный магнитоприемник и схема его намотки. Выход дополнительного магнитоприе ника 1 подключен к управляницему вхо дУ, а выход измерительного магнитоприемника 2 - к сигнальному входу усилителя 3 с автоматической регулировкой. Выход усилителя 3 с автоматической регулировкой через детектор 4 подключен к первому входу блока 5 сравнения, второй вход которого связан с выходом задатчика 6. Устройство работает следующим образом. При движении горной машины на разных зквидистантных расстояниях от токонесущего провода, а равно и при изменении величины тока в токонесущем проводе, меняется величина наводимой ЭДС в магнитоприемнике 1. Так как обмотка магнитоприемника 1 вьшолнена непрерьгоным проводом в виде восьмерки, именяцей равные плсяцади половин (фиг.2), что обеспечивается конструкцией каркаса магнитоприемника, то ЭДС, наводимые в этих половинах, будут иметь противоположные направления за счет смены направления намотки каждой половины (восьмерка) и отличатьс друг от друга на величину, пропорциональную расстоянию между центрами этих половин, а на вы ходе магнитоприемника 1 будет формироваться напряжение разности этих ЭДС, т.е. напряжение, пропорциональное градиенту магнитного поля в мес те расположения магнитоприемника , Таким образом достигается полная идентичность в работе половин магнитбприемника 1, что повыщает точность измерения градиента магнитного поля и надежность функционирования канала измерения градиента магнитного поля. Выходной сигнал магнитоприемника 1 управляет изменением коэффициента передачи усилителя 3 с автоматической регулировкой коэффициента усйления, на вход которого поступает измерительный сигнал с магнитоприем ника 2, посредством которого определяется, положение горной машины относительно токонесущего проводника. Таким образом на выходе усилителя 3 формируется измерительный сигнал с учетом градиента магнитного поля в месте расположения горной машины, чем и достигается постоянство крутизны статической характеристики всего чувствительного элемента. Далее этот сигнал через детектор 4 поступает на первый вход блока 5 сравнения, на второй вход которого подается напряжение с задатчика 6 опорного напряжения. На выходе блока 5 сравнения формируется сигнал, пропорциональный отклонению горной машины от заданной эквидистантнойлинии, заДание которой осуществляется с помощью задатчика 6. Предлагаемое устройство мсякет найти широкое применение для систем автоматического управления горных машин, вождения мобильных транспортных и сельскохозяйственных машин. В част-, ности, его использование для автоматического управления горными маяшнами в составе комплекса технических средств направленного вождения позволяет повысить точность контроля положения. В результате повыщается качество проходимых траекторий, а также улучшаются динамические характеристики систем управления. Формула изобретения Устройство контроля положения горной ма0тны в индукционном поле токонесущего проводника, содержащее измерительный магнитоприемник, соединенный с сигнальным входом усилителя с автсматической регулировкой, дополнительный магнитоприемник, детектор, блок сравнения и. задатчик, .отличающееся тем, что, с целью повышения точности контроля, обмотка дополнительного магнитоприемиика выполнена в виде восьмерки, а выход его соединен с управляющим входом усилителя с автоматической 3 регулировкой, выход которого через детектор соединен с первым входом 12638444 блока сравнения, второй вход которого соединен с выходом задатчика.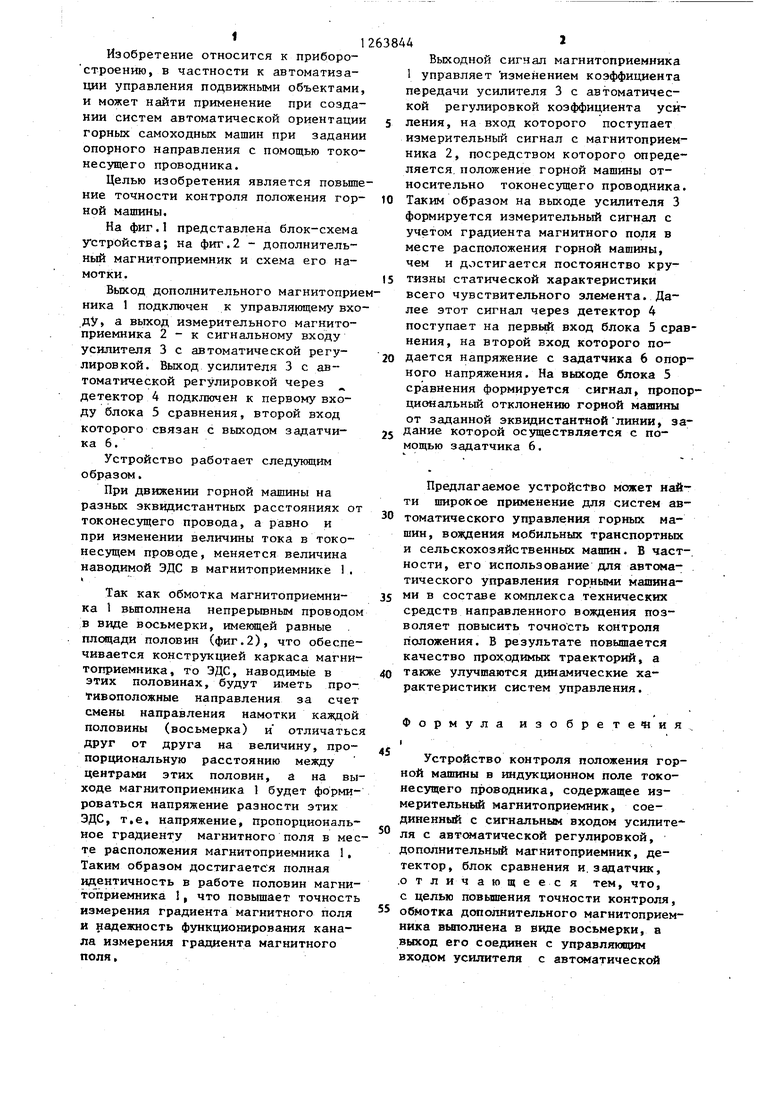
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Устройство для управления движением самоходного кабелеукладчика | 1986 |
|
SU1368861A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2004 |
|
RU2279689C2 |
| Устройство для исследования трехмерных циркуляционных гидроаэродинамических полей | 1986 |
|
SU1336053A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КУРСОВОГО УГЛА САМОХОДНОЙ МАШИНЫ1^СВСОЮЗНАЯ- '••-• ---"^'i^m | 1972 |
|
SU324969A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1973 |
|
SU385548A1 |
| Способ автоматического контроля положения секции механизированной крепи | 1990 |
|
SU1756556A1 |
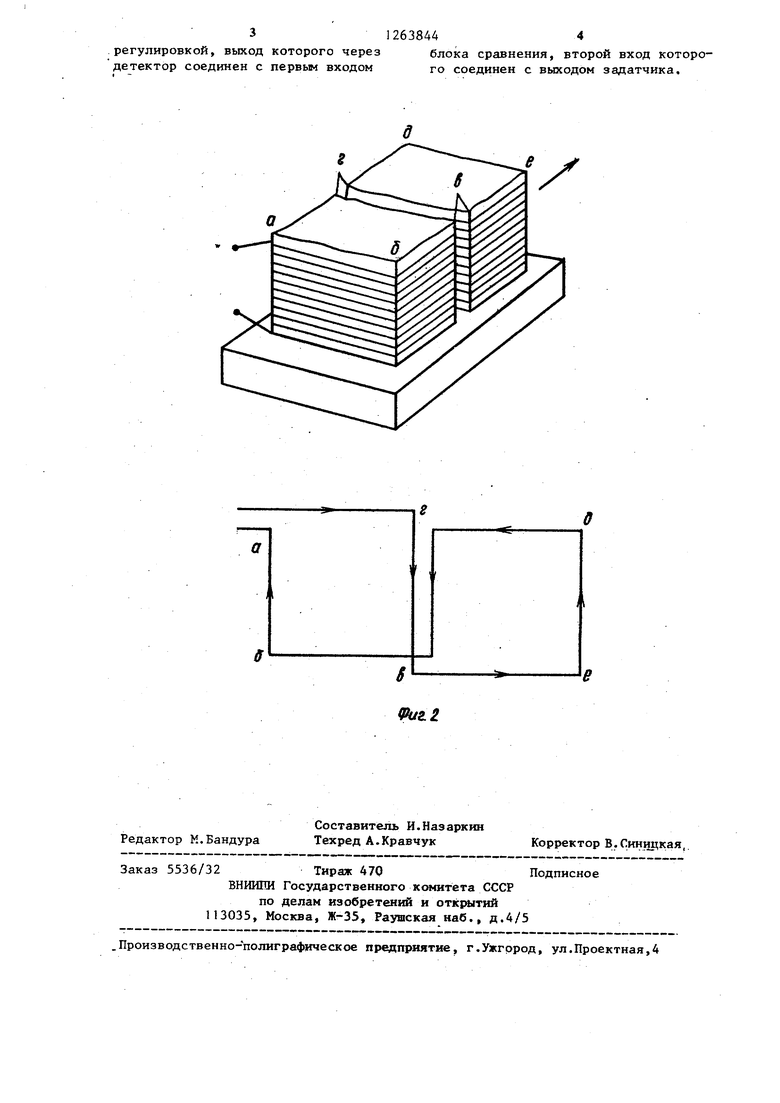
Изобретение предназначено для автоматического контроля и управления направленным движением мобильных горных и тра нспортных машин. Целью изобретения является повьшение точности измерения положения горной машины (ГМ)., Устройство:содержит измерительный 2 и дополнительньй I магнитоприемники (МП). Обмотка МП 1 вьтолнена в виде восьмерки и имеет равные плрщади половин. При движении ГМ на выходе МП 1 формируется напряжение разности ЭДС в этих половинах. Это напряжение пропорционально градиенту магнитного поля в месте расположения МП 1. Измерительный сигнал с МП 2 пропорционален положению ГМ относительно токоведущего проводника. Сигналы с МП 1 и 2 поступают на усилитель 3 с автоматической регулировкой. На его выходе формируется измерительный сигнал с учетом градиента магнитного поля в месте расположения Ш. Далее через детектор 4 этот 5g сигнал поступает на первьй вход блока (Л 5 сравнения. На второй вход блока 5 С подается напряжение с задатчика 6. Выходной сигнал блока 5 пропорционален отклонению ГМ от заданной эквиди- s стантной линии. 2 ил.
9utl
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 0 |
|
SU312560A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чувствительный элемент для систем автоматического направления движения самоходных машин по эквидистантным линиям относительно токонесущего провода | 1973 |
|
SU454000A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
