ю
О5 СП
О) QO
Изобретение относится к автоматике и вычислительной технике и может быть использовано в химической, нефтехимической и металлургической промышленности, в частности в системе автоматического управления отделением абсорбции-десорбции производства кальцинированной соды аммиачным способом.
Цель изобретения - повышение точности и качества регулирования.
На чертеже изображена схема регулятора.
Схема содержит адаптивную модель
1объекта регулирования, объект 2 регулирования, задатчик 3, блок 4 регистров, первый 5, второй 6, третий 7,-четвертый 8, пятый 9 и шестой 10 блоки умножения, первый 11, второй 12 и третий 13 сумматоры, нелинейный преобразователь 14 и блок 15 деления.
Регулятор работает следующим образом.
Сигналы с входа и выхода объекта
2регулирования поступают в.блок 4 регистров. Последний хранит вектор данных Z, причем перед поступлением новой пары выходной координаты объекта регулирования У и управления 1. происходит последовательная перезапись хранимых данньпс по правилу
Р, ,
к- 1 1
U,.,.,. (i 2,n).
где Pj и Pj обозначают регистры, предназначенные для хранения одного значения соответствующих переменных.
В результате указанной операции теряются самые старые значения входа и выхода, а затем в регистры Р и Р записывается новая пара У и1,.
Вектор данных с блока 4 регистров поступает на второй вход адаптивной модели 1 объекта регулирования, на первый вход которой поступает значение выхода объекта 2 регулирования. Адаптивная модель 1 объекта регулирования реализует рекуррентный метод наименьших квадратов, в результате чего оцениваются параметры модели, ковариационная матрица оценок параметров и невязки (оценки шума в объекте 2 регулирования).
Полученная оценка невязок е с пятого выхода модели 1 поступает
на вход нелинейного преобразователя 14. Указанный преобразователь реализует функцию вычисления оценки г дисперсии шумов г в объекте регулирования на основе уравнения экспоненциального сглаживания
г г ( (е -г )
К-11 к к к
И использует полученную оценку для вычисления значения величин параметра И-Р,.
Для получения оптимального закона регулирования используется информация с адаптивной модели 1 объекта 2 регулирования о векторах параметров С, данных 2 и ковариационной матрице Р оценок параметров модели объекта регулирования, определяемых в соответствии с,моделью объекта регулирования
y., i:a,y..,, -Z:b,l,,.,.e,, (1)
С.
к
Р
С этой целью во второй блок 6 умножения с первого и второго выходов модели 1 поступают значения Ь иФ, что позволяет определить произведение , а в третий блок 7 умножения поступают значения P,f (с третьего выхода модели 1) и Нр,, с выхода нелинейного преобразователя 14, что позволяет найти произведение (И-(,)Р . Полученные произведения суммируются в первом сумматоре 11, после чего сумма попадает на ,первый вход четвертого блока 8 умножения, на второй вход которого
поступает вектор данных S с выхода блока 4 регистров. В результате, на выходе блока 8 умножения появляется произведение ((U ) +h, ) S. . На второй вход шестого блока 10 умножения поступает с задатчика 3 заданное значение выходной переменной объекта управления Ущ, которое умножается на параметр Ь,, поступающий с первого выхода модели 1 на первый вход гаестого блока 10 умноже ния. Второй сумматор 12 на основе выходов четвертого 8 и шестого 10 блоков умножения формирует числитель в законе регулирования {ьу.:, -(i-f.jp:..,-i sj. На первый вход пятого блока 9 умножения с выхода нелинейного преобразователя поступает значение второй вход - значение Р с четвертого выхода модели 1, что позволяет сформировать произведение (1+Рк+,,Р(, . На входы первого блока 5 умножения поступает знач ние параметра b с первого выхода модели 1 , что позволяет получить Ь Т зетий сумматор 13 вычисляет знаменатель в законе регулирования на основе значений сигналов, поступающих с выходов пятого 9 и первого 5 блоков умножения. Блок 15 деления позволяет определить управляющие воздействия в соответствии с законо регулирования и,- (1+е;к.,),5,-ь,у;,,}. -(к -2) Закон регулирования (2) обеспечивает минимизацию показателя качества регулирования .,,)Ч.,Ук..-с,)/у.ц (i ),(3) где Е - символ операции взятия мате матического ожидания; К - дискретное время, который может быть преобразован к в ДУ ((.,) РЬ Ь ) ((,,,) РЬФ . -Ь, УЛ,) + (l,.,)(, (, f-2q S y;,. (4) Закон регулирования (2 на осно использования показателя качества регулирования (3) обеспечивает дуальность регулирования благодаря на личию в критерии двух составляющих, первая из которых (У, i обуславл1гоает |3аданное качество регули рования, а вторая (У бор регулирующих воздействий, способствующих быстрейшему обучению , адаптивной модели. Изменением параметра fi можно добиться реализации регуляторов с различными свойствами. При р -1 неопределенность оценок параметров модели не учитывается, а при Mj,n регулирующее воздействия не учитывают требований идентификации. Путем определения параметра (U как нелинейной функции от г , изменяющейся в пределах между -1 и О и возрастающей с ростом оценки г г . , вводится естественная пац mir, раметризация закона регулирования {2) - с ростом ошибки рассогласования между выходом объекта регулирования и его заданным значением, отраженным в росте оценок г , неопределенность оценок параметров модели учитывается все сильнее, так как рост г обусловлен (при решении задачи стабилизации) именно неточностью оценок параметров модели. Доопределяя ju таким образом. что при г г . параметр f It - nSckX К1-1 вен минус единице, можно исключить учет неопределенности оценок параметров модели. Регулирующие воздействия реализуются в объекте регулирования, после чего цикл определения регулируюшлх воздействий повторяется в том же порядке. Техническими преимуществами адаптивного регулятора являются возможность регулирования динамических объектов с нестационарными параметрами (за счет введения блока регистров) , что позволяет улучшить качество переходных процессов в объекте регулирования и увеличить точность слежения выхода объекта регулирования за его заданньм значением,использование при регулировании неопределенности оценок параметров модели объекта регулирования и выполнение условий параметрической идентифицируемости модели объекта регулирования за счет введения нелинейного преобразователя, что совместно ведет к улучшению качества регулирования и увеличению точности слежения выхода объекта регулирования за его данным значением (особенно в переходных режимах, где требуется высокая точность оценки параметров модели).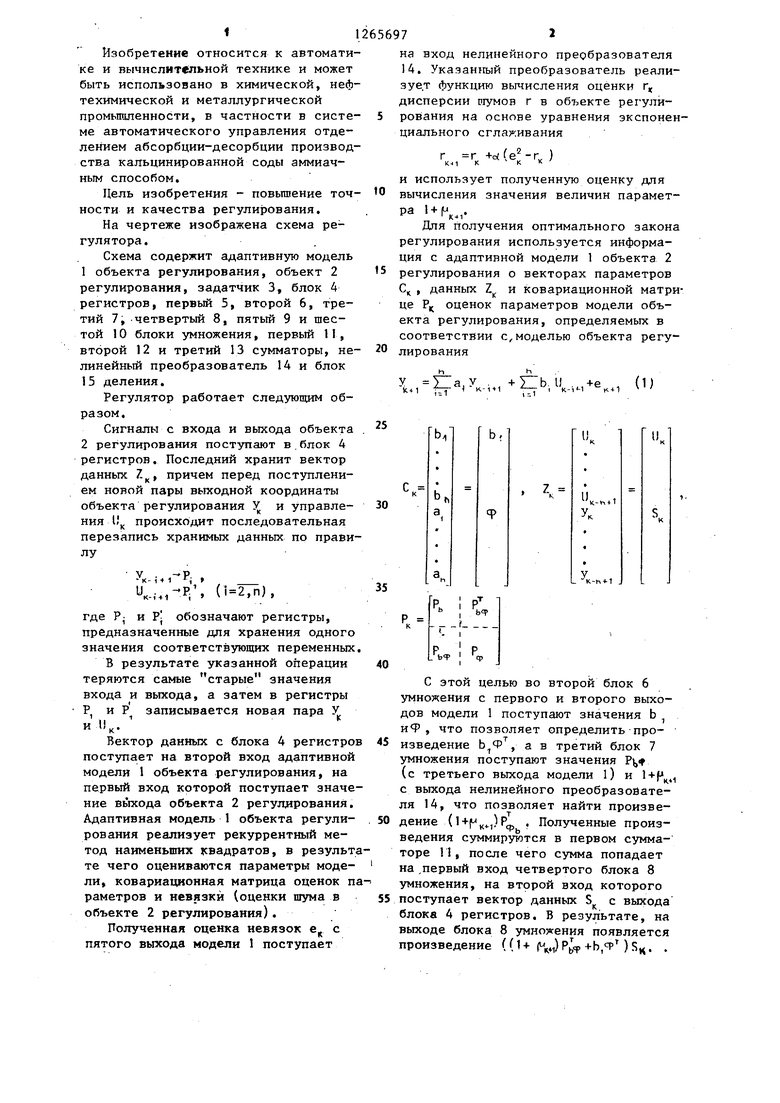

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Устройство для оценки деятельности операторов систем управления | 1978 |
|
SU752458A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| Адаптивная система управления для объектов с запаздыванием | 1989 |
|
SU1689920A1 |
| Адаптивный анализатор спектра | 1985 |
|
SU1291893A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
Изобретение относится к области автоматического управления нестационарными объектами. Цель изобретения - повьшение точности и качества управления за счет увеличения точности слежения выхода объекта управления за его заданным значением. Адаптивный регулятор содер:ртт адаптивную модель объекта регулирования j подключенную первым входом к выходу объекта регулирования,задатчик, блок регистров, группу блоков умножения, группу сумматоров, нелинейный преобразователь и блок деления. Новым.является введение в адаптивный регулятор блока регистров, группы блоков умножения, группы сумматоров, нелинейного преобразователя и связи между элементами. 1 ил. с 
| Устройство для управления технологическими процессами | 1974 |
|
SU607179A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивный регулятор | 1981 |
|
SU1045220A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
