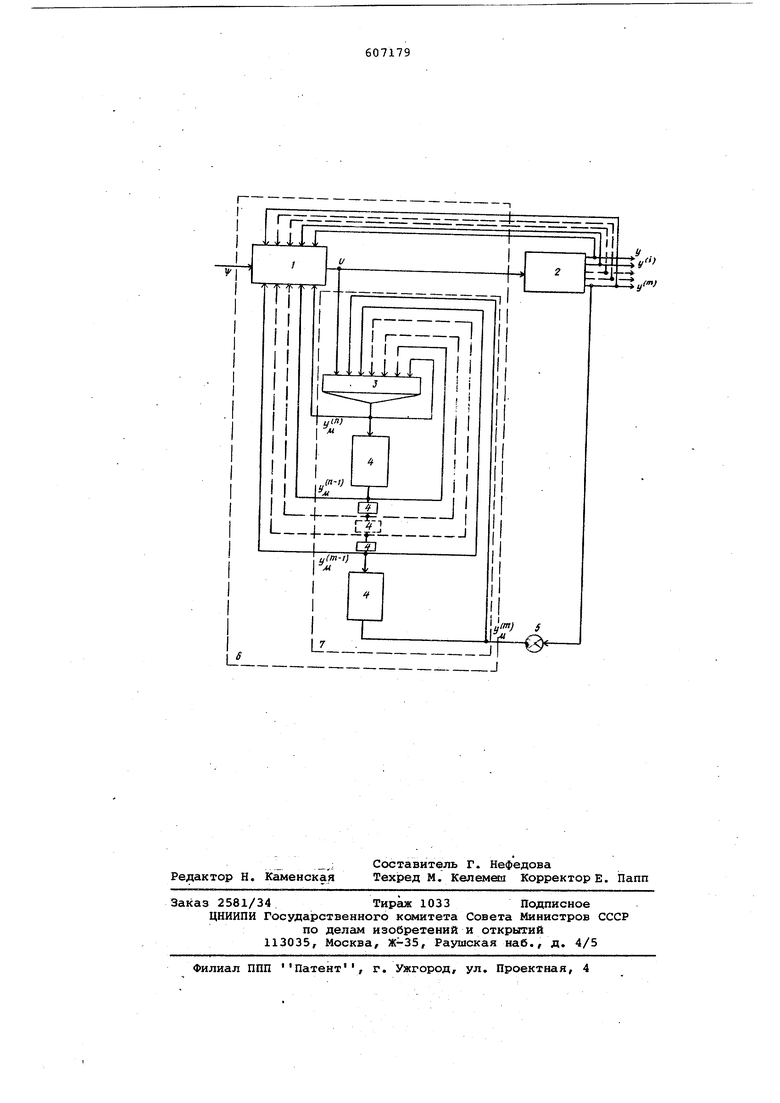
та . и оценки адекватности модели объекту. Сущность работы устройства заключается в следующем. Сигнал управления U подается.на вход модели объекта 7, моделирукнцей динамические свойства объекта регулиро вания 2. При правильной настройке модели и отсутствии возмущающих воздействий на объект регулирования 2 вьтолняются тождества ) (1п1 - АЛ откуда следует у Y 0 11) СП . и Y для 1 Ян. Таким образом, производные выходного сигнала модели объекта 7 воспроизводят соответствующие производные, выходного сигнала объекта регулирования 2. Поскольку в модели объекта 7 интеграторы 4 включены последовательно, каж Дый входной сигнал интегратора 4 является с некоторым коэффициентом произво ной о.т его выходного сигнала и т- ой производной от выходного сигнала модел объекта 7, если между данньв входом и выходом модели объекта 7 включено i интеграторов. Следовательно, измеряя входные сигналы интеграторов можно получить n-m переменных где i tl, 2,...,n-m, моделирующих соответствующие реальные производные выходного сигнала объекта регулирования Y-Затем входные сигналы интеграторов выдаются на входы вычислительного блока 1 и преобразуются в нем в соответствии ( с заданным законом управления. Применение указанного устройства позволяет вводить в закон управления производные более высокого порядка, чем это возможно при использовании дифференцирующих звеньев. Кроме того, полезные сигналы, пропорциональные производным, менее искажены различного рода помехами, что позволяет повысить точность устройства. Формула изобретения Устройство для управления технологическими процессами, содержащее вычислительный блок и последовательно соединенные сумматор и интеграторы, выходы сумматора и интеграторов соединены с соответствующими входами сумматора ,отличающееся тем, что, с целью повышения точности устройства, в нем входы вычислительного блока соединены с выходами сумматора и соответствующих интеграторов, а его выход соединен с соответствующим входом сумматора. Источники информации, принятые во внимание при экспертизе: 1.Лайон П. Быстрая идентификация линейных и нелинейных систем. Ракетная техника и космонавтика, т. 5, № 10, 1967, 130-139. 2.Бойчук Л.М. Структурный синтез нелинейных систем автоматического управления. Энергия , М., 1971| с. 24-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МАТРИЦЫ КОЭФФИЦИЕНТОВ ПЕРЕДАЧИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2057365C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| Устройство для оценки деятельности операторов систем управления | 1978 |
|
SU752458A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| Устройство для импульсного регулирования | 1977 |
|
SU697967A1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Устройство для функционального контроля систем управления | 1977 |
|
SU732820A1 |