N3
О5
СП
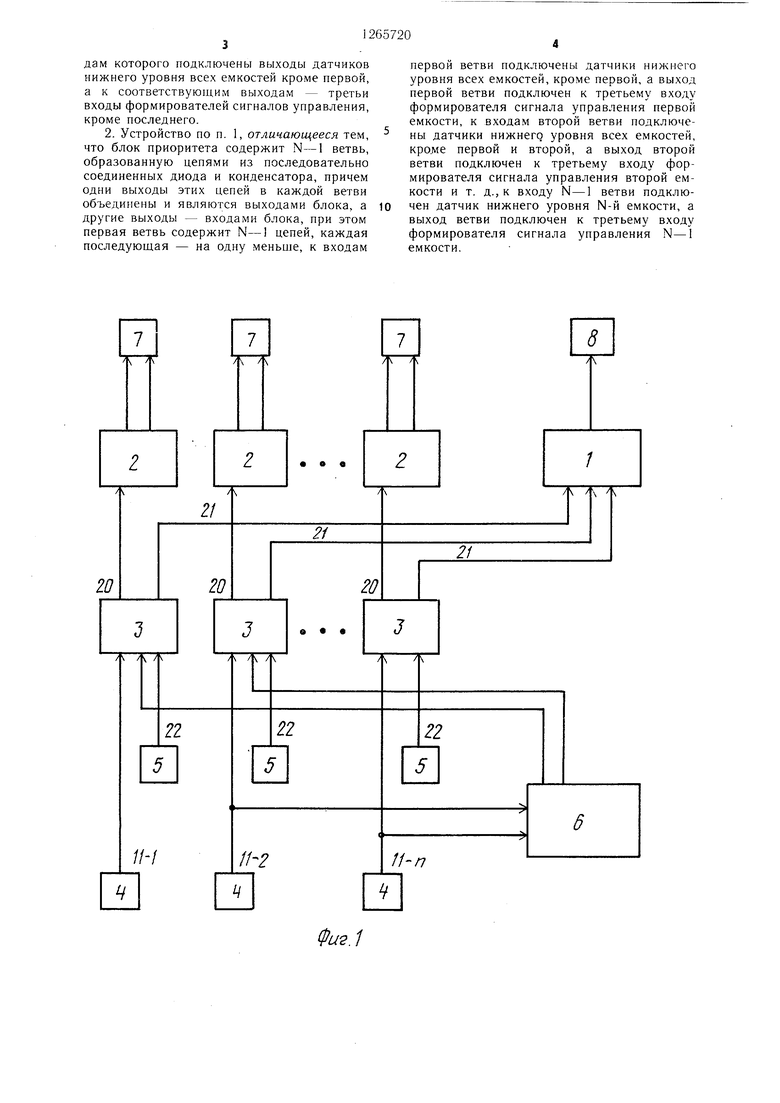
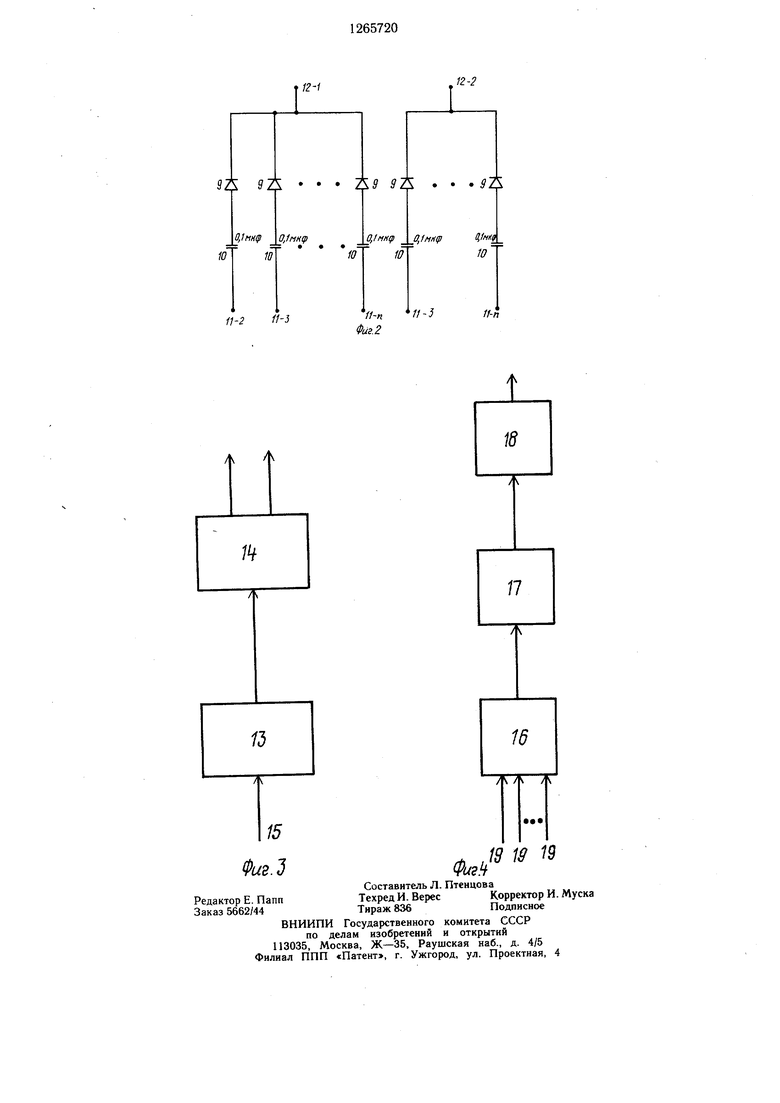
ю Изобретение относится к технике автоматического управления производственными процессами, в частности при загрузке емкостей, расположенных над многокомпонентными весами. Цель изобретения - повышение производительности линии потребления материала без емкостей. На фиг. изображена блок-схема предлагаемого устройства; на фиг.2 - схема блока приоритета; на фиг.З - схема блока управления задвижкой; на фиг.4 - схема привода транспортера-питателя. Блок-схема устройства содержит привод 1 транспортера-питателя, блоки 2 управления задвижками, входы которых соединены с первыми выходами соответствующих формирователей 3 сигналов управления, на входы которых включены датчики нижнего 4 и верхнего 5 уровней материала и выходы блока 6 приоритета, магнитные пускатели задвижек 7 и транспортера 8. Блок приоритета (фиг.2) содержит ветви, количество которых на единицу меньше количества емкостей. Ветви состоят из цепей, представляющих собой последовательное соединение диодов 9 и конденсаторов 10. в каждой ветви содержится N-К цепей, где N - количество емкостей, К - порядковый номер емкости, к входу формирователя сигнала управления которой подключен выход ветви. На входы ветвей подключены датчики нижнего уровня всех последующих емкостей. Сигнал из датчика нижнего уровня последующей емкости поступает на вход ветви линии связи 11-2, 11-3,..., 11-п и появляется на выходе ветви провод 12-1 и далее поступает на вход формирователя сигнала управления первой емкости. Появление этого сигнала приводит к закрытию задвижки первой емкости и т. д. Блок управления задвижкой (фиг.З) содержит усилитель 13, представляющий собой модуль С-IM, и реле 14. При появлении «1 на проводе 15 через усилитель 13 срабатывает реле 14 и подает команду на реверсивный магнитный пускатель задвижки. Задвижка открывается. При отпускании реле задвижка закрывается. Схема привода транспортера-питателя (фиг.4) содержит инвертор 16, усилитель 17 и реле 18. Работа блока заключается в следующем. При наличии на проводе 19 «1 на выходе инвертора 16, который представляет собой модуль Г-1М, имеется «О, реле 18обесточено; при появлении на проводе 19«О на выходе инвертора 16 имеется «1, срабатывает реле 18 через усилитель 17, который представляет собой модуль С-1М. Реле, сработав, подает напряжение на катушку магнитного пускателя, последний срабатывает и транспортер начинает работать. Работа устройства заключается в следующем. При расходе материала из емкости срабатывает датчик нижнего уровня и по проводу 11 на вход формирователя 3 сигнала управления, представляющего собой триггер, поступает сигнал «О, на первом его выходе появляется «1, которая по проводу 20 поступает в блок управления задвижкой, что приводит к срабатыванию реле, и задвижка, открывается, одновременно с второго выхода триггера «О по проводу 21 поступает в привод 1 транспортера, что приводит к срабатыванию реле в этом блоке и транспортер начинает работу. Транспортер работает до тех пор, пока не наполняются все е.мкости. При наполнении емкости срабатывает датчик верхнего уровня и по проводу 22 на вход триггера 3 поступает «О, что приводит к появлению на его выходах «О на проводе 20 и «1 на проводе 21. При заполнении материалом всех емкостей по всем проводам 21 в блок привода транспортера поступают «I, что приводит к остановке транспортера. Блок приоритета введен для того, чтобы увеличить производительность линии потребления материала из расходных емкостей. Рассмотрим случай, когда идет заполнение материалом первой расходной емкости, а в это время идет забор материала из второй емкости. При срабатывании датчика нижнего уровня второй емкости происходит открытие задвижки второй емкости аналогично описанному выше, одновременно из датчика нижнего уровня второй емкости по проводу 11-2 на вход блока приоритета поступает «О, благодаря чему происходит перезаряд конденсатора (фиг.4), импульс положительной полярности через диод по проводу 12--1 поступает на вход триггера 3 первой расходной емкости, что приводит к закрытию задвижки первой емкости и материал из транспортера поступает во вторую емкость. Если открыты задвижки первой и второй емкостей, а материал кончается в третьей, то аналогично описанному выше происходит закрытие задвижек первой и второй емкостей и открытие задвижки третьей расходной емкости. Формула изобретения 1. Устройство для управления загрузкой емкостей, содержащее транспортер-питатель и привод транспортера-питателя, датчики верхнего и нижнего уровней, установленные в каждой из N емкостей и подключенные к входам формирователей сигналов управления, к первым выходам которых подключены блоки управления задвижками, установ тенными на линиях питания каждой емкости, а к вторым выходам - входы привода транспортера-питателя, отличающееся тем, что, с целью повышения производительности линии потребления материала из емкостей, устройство содержит блок приоритета, к входам которого подключены выходы датчиков нижнего уровня всех емкостей кроме первой, а к соответствующим выходам - третьи входы формирователей сигналов управления, кроме последнего.
2. Устройство по п. 1, отличающееся тем, что блок приоритета содержит N-1 ветвь, образованную цепями из последовательно соединенных диода и конденсатора, причем одни выходы этих цепей в каждой ветви объединены и являются выходами блока, а другие выходы - входами блока, при этом первая ветвь содержит N- цепей, каждая последующая - на одну меньще, к входам
первой ветви подключены датчики нижнего уровня всех емкостей, кроме первой, а выход первой ветви подключен к третьему входу формирователя сигнала управления первой емкости, к входам второй ветви подключены датчики нижнегд уровня всех емкостей, кро.ме первой и второй, а выход второй ветви подключен к третьему входу формирователя сигнала управления второй емкости и т. д., к входу N-1 ветви подключен датчик нижнего уровня N-й емкости, а выход ветви подключен к третьему входу формирователя сигнала управления N-1 емкости.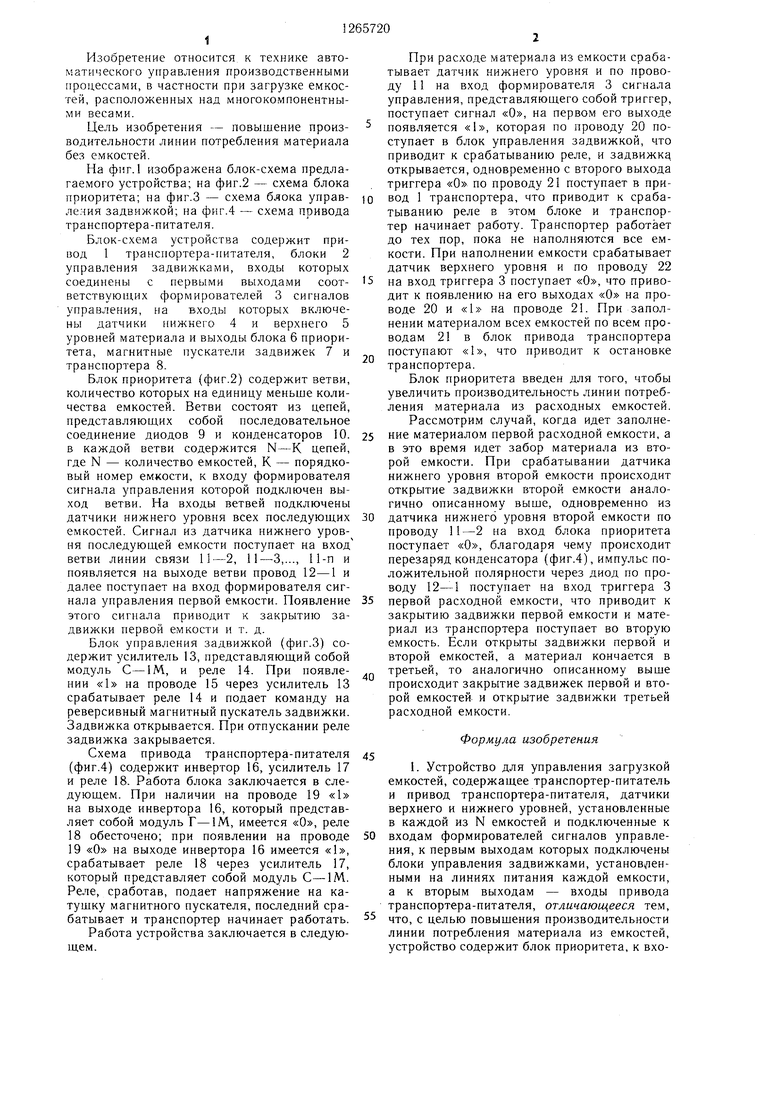
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом загрузки емкостей | 1984 |
|
SU1270752A1 |
| Устройство для управления подачей сыпучего материала в расходные бункеры | 1976 |
|
SU640937A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Установка для приготовления битумно-кукерсольных мастик | 1980 |
|
SU994604A1 |
| Автоматический гранулометр сыпучих материалов | 1984 |
|
SU1241106A1 |
| Устройство для управления загрузкой бункеров | 1990 |
|
SU1738744A1 |
| Устройство для управления загрузкой материалов в расходные бункеры | 1977 |
|
SU691368A1 |
| Устройство управления сортировкой лесоматериалов | 1990 |
|
SU1794501A1 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ СИГНАЛА ДЛЯ ОПРЕДЕЛЕНИЯ ФАЗОВОГО СДВИГА | 1995 |
|
RU2159410C2 |
Изобретение относится к области автоматического управления производственными процессами и может быть использовано в комбикормовой промьпшленности. Цель изобретения - повышение производительности линии потребления материала из емкостей. Для этого устройство снабжено формирователями сигналов управления, к входам которых подключены датчики нижнего и верхнего уровней материала, первые выходы которых подключены к блокам управления задвижками и вторые выходы - к приводу транспортера-питателя, блоком приоритета, к входам которого подключены, начиная с второй емкости, датчики нижнего уровня материала, а выходы которого подключены к входам формирователей сигналов управления. 1 з.п.ф-лы, 4 ил.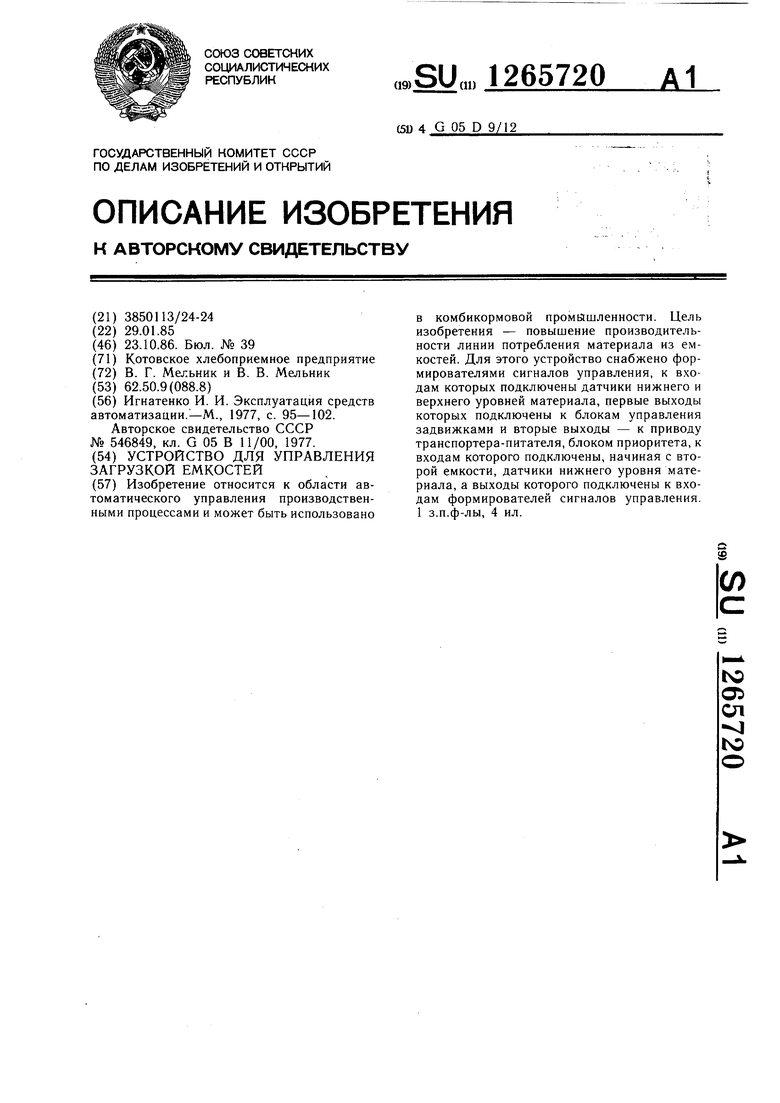
Фи2.1
f2-i
/i
,2-2
18
| Игнатенко И | |||
| И | |||
| Эксплуатация средств автоматизации.-М., 1977, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Устройство для управления процессом загрузки расходных емкостей | 1974 |
|
SU546849A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
