Известные навигационные системы, использующие гироскопические приборы, не обеспечивают стабиль ой ориентирозаинои в пространстве оси гироскопов и дают значительные навигационные ошибки.
Предлагаемая система гироскопов отличается тем, что отсчет углов положения летательного аппарата или корабля производится не относительно оси отдельного гироскопа, а относитель}1о осреднениой оси системы гироскопов. В этой системе осуществлена взаимная коррекция осей отдельных гироскопов с помощью сигналов, вырабатываемых счегно-регистрирующими устройствами. В системе гироскопов предусмотрены взаимная коррекция и осреднение выходного сигнала, применены гироскопические датчики с электромагнитной коррекцией, счетно-решающие устройства для осреднения и корректирования сигналов.
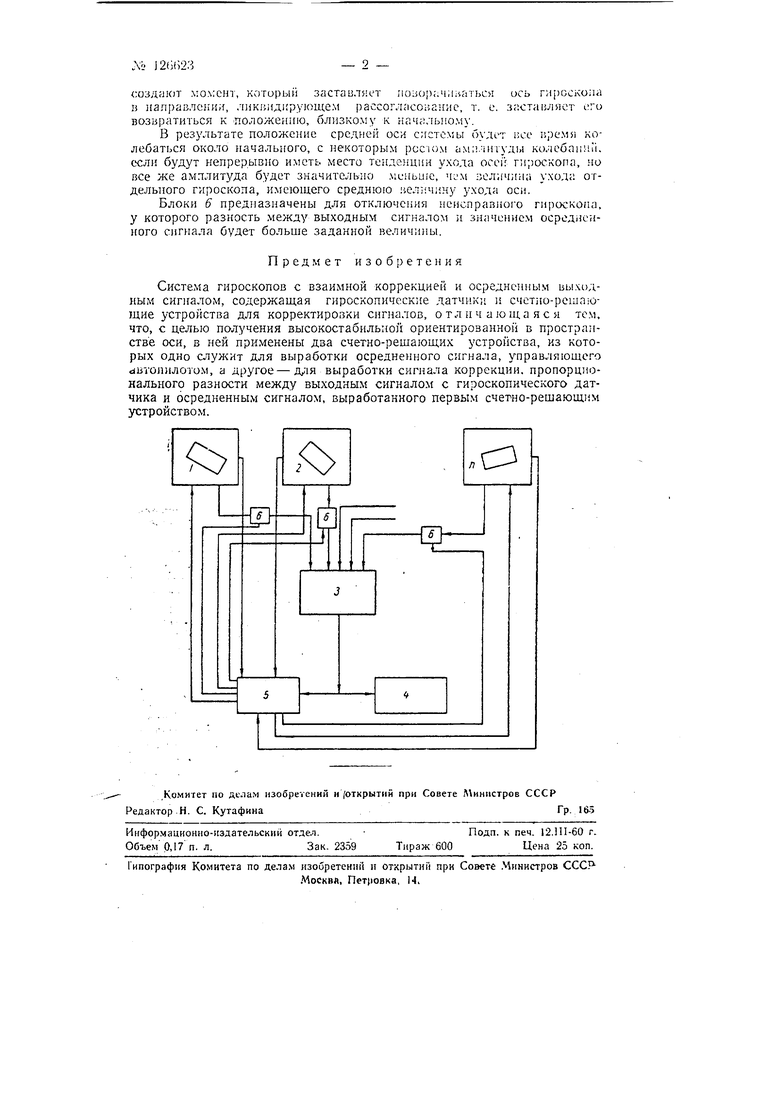
На чертеже дана блок-схема предлагаемой системы.
Выходные сигналы, отличающиеся .между собой вследствие ощибок ухода гироскопов, поступают от гироскопических датчиков /, 2...п в счетно-решающее устройство осреднения сигналов , где сигналы алгебраически складываются, осредняются и выдаются как среднеар фметическая или среднеквадратичная величина на автопилот -# и в счетно-решающее устройство корректирующих сигналов 5. Так как входящие в блок 3 сигналы имеют осиибки вследствие ухода гироскопов от начальной оси, то, складываясь и вычитаясь с различными знаками в нем, они взаимно исключают друга, уменьшая в целом ошибку вследствие ухода оси гироскопа. При этом, чем больше число датчиков будет в системе, тем меньше ошибки ухода в осредненном сигнале.
Осредненный сигнал поступает в блок 5, куда подаются также же сигналы от датчиков, где происходит определение разностей между выходными сигналами с гироскопических датчиков и осредненным сигналом н вырабатываются сигналы для корректоров датчиков, пропорциональные этим разностя.м. Коррекционные устройства латчикоа
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2234678C1 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2235294C2 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
