Изобретение относится к машиностроению, а именно к промьшшенным манипуляторам для механизации и автоматизации технологических процессов в различных отраслях промышленности.
Целью изобретения является уменьшение габаритов схвата и расширение его технологических возможностей за счет увеличения диапазона перемещения зажимных губок.
На фиг.1 изображен предлагаемый схват манипулятора; на фиг.2 - разрез А-А на фиг.1.
Схват манипулятора содержит зажимные губки 1, смонтированные на ползунах 2, установленных с возможностью продольного перемещения на корпусе 3 силового цилиндра с магнитной связью между поршнями 4 и ползунами 2. На корпусе 3 установлен фланец 5 и штуцер 6, а с торцов он закрыт крышками со штуцерами 7, крьш1ки крепятся к скобе 8. На ползунах 2 жестко смонтированы зубчатые рейки 9 и 10 с возможностью их взаимодействия с шестерней 11, свободно посаженной на оси 12, укрепленной на скобе 8. В направляющих пазах скобы 8 установлены по- водки 13, жестко укрепленные на ползунах 2. Поводки 13 служат для исключения поворота ползунов 2 вокруг своей оси. Для индуцирования магнитного силового поля жестко связывающего поршни 4 с ползунами 2, в пос ледних установлены катушки 14 электромагнитов постоянного тока. Ползуны 2 жестко фиксируются на корпусе 3 коническими упругими кольцами 15, об- жимаюпщми корпус 3 и соединяющими ползуны 2 с муфтами 16,
Схват манипулятора работает следующим образом.
Включают питание катушек 14 от источника постоянного тока (не показан) , магнитное силовое поле жестко связывает поршни 4 с ползунами 2, при этом торцы ползунов 2 магнитным полем притягивают муфты 16, которые совместно с ползунами взаимодействуют своими проточками с коническими поверхностями упругих колец 15 и отжи,
10
5
0
5 Q
0
5
0
мают последние от корпуса 3, тем самьм расфиксируют ползуны 2. Подавая рабочую среду (жидкость или газ) под давлением в полость корпуса 3 через штуцеры 7 и соединив штуцер 6 с трубопроводом выхода, приводят к принудительному перемещению поршней 4 навстречу друг другу. Поршни 4 магнитным полем перемещают ползуны 2 в том же направлении. .Сближение ползунов 2 и встречное перемещение укрепленных на них зубчатых реек 9 и 10„ которые взаимодействуют с шестерней 11, приводит к синхронной сходимости зажимных губок 1. При этом поводки 13 скользят навстречу в направляющих пазах скобы 8, гарантируя ориентацию зажимных губок. При прекращении подачи рабочего тела под давлением через штуцеры 7 сближение губок 1 прекращается, и при отключении питания катушек 14 ползуны 2 жестко фиксирз - ются на корпусах 3 зажимными упругими кольцами 15 в результате отхода муфт 16 от ползунов 2 под действием упругих сил колец 15 и взаимодействия их конических поверхностей с коническими проточками ползунов и муфт. Для рал- жатия губок 1 включают питание катушек 14 и подают рабочее тело под давлением через штуцер 6, а штуцеры 7 соединяют с трубопроводом выхода,
Ф о р мула изобретения
Схват манипулятора, содержащий силовые цилиндры, зажимные губки, смонтированные на подвижных элементах силовых цилиндров с возможностью синхронного перемещения, отличающийся тем, что, с целью умен зшения габаритов и повышения надежности, схват содержит по меньшей мере два бесштоковых поршня и дополнительно введенные ползуны, устаноЕ - ленные на корпусе силового цилшщр 1 с возможностью перемещения вдоль его оси, а на ползунах установлены зажимные губки, дополнительно введенные катушки электромагнита и стопорные механизмы, при этом электромагниты имеют возможность взаимодействия с поршнями цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1440707A2 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Устройство для захвата и перемещения электропроводных материалов | 1983 |
|
SU1199584A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Двухкоординатный стол | 1986 |
|
SU1421478A1 |
| Схват манипулятора | 1979 |
|
SU850374A2 |
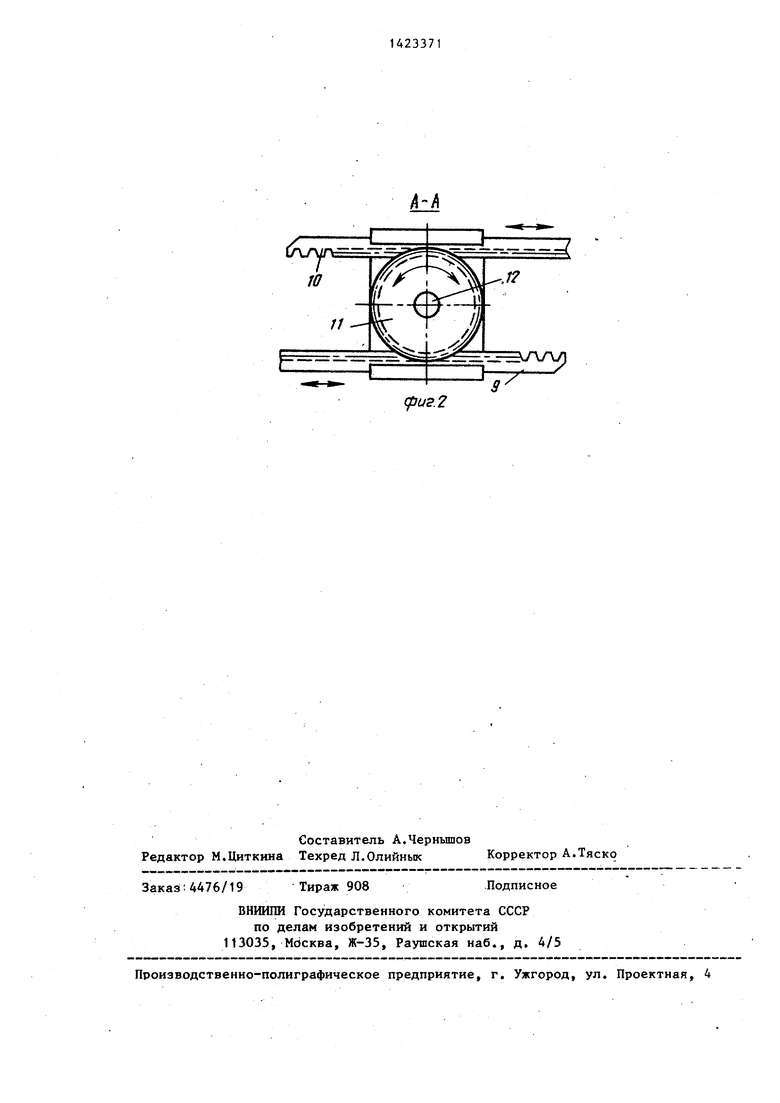
Изобретение может быть использовано в промьшленных ман пуляторах для автоматизации и механизации технологических процессов. Цель, изобретения состоит в расширении технологических возможностей за счет увеличения диапазона перемещения зажимных губок. Для этого схват снабжен силовым цилиндром с магнитной связью между его поршнями А и ползунами 2. В исходном состоянии зажимные губки 1, смонтированные на ползунах 2, жестко зафиксированы упругими кольцами 15 на корпусе 3 силовых цшшндр(ов. При включении питания катушек 14 злектро- магнита ползуны 2 жестко соединяются с поршнями 4 и, притягивая муфты 16, отжимают кольца 15 от корпуса 3 и расфиксируют губки 1. Подача рабочей среды под давлением в корпусе 3 цилиндров через штуцеры 7 приводит к синхронной сходимости губок 1 за счет взаимодействия зубчатых реек 9 и 10 с шестерней, а перемещение поводков 13, смонтированных на ползунах 2, в направляющих пазах корпуса предотвращает перекос зажимных губок. 2 ил. S (Л
Составитель А,Чернышев Редактор М.Циткина Техред Л.Олийньк Корректор А.Тяско
Заказ:4476/19
Тираж 908
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
cfius.2
-Подписное
| Схват манипулятора | 1978 |
|
SU727424A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
