00 Л СО О1
Oi
С5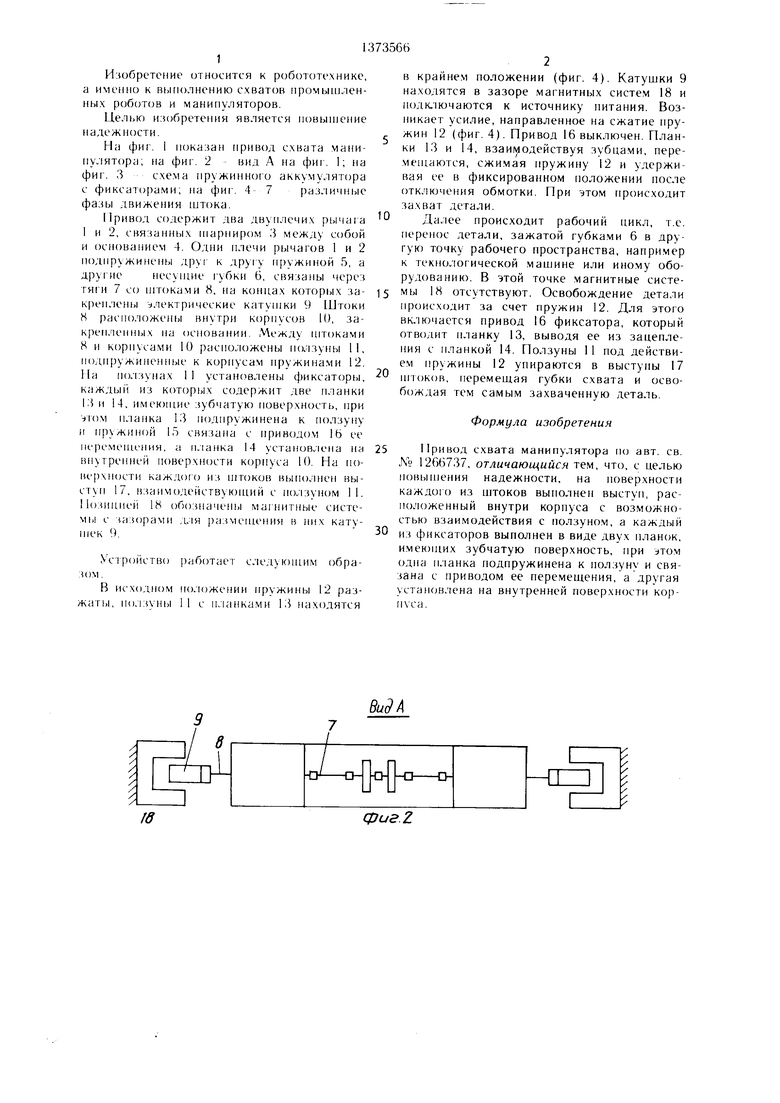
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
Изобретение относится к области робототехники, а именно к выполнению схватов иромы тленных роботов и манипуляторов. Целью изобретения является повышение надежности. В исходном положении нружины 12, расположенные между но.гп ном и Ki)|Miy- сом 10, разжаты, а кату1нки 9, закреп.len- ные на концах штоков 8, находятся н зазо ре магнитных систем 18, Захват дета.1и происходит при подключении обмоток к источнику питания, при происходи г перемещение штоков 8 и сжатие пружин 12, которые после отключения обмоток сохраняют свое состояние за счет действия (()иксато- ров, образованных планками li и 14, имеющими зубчатую поверхность. Л.1я оснобо/к дения захваченной дета.ти пос.че перемени ния с.хвата в заданную точку вк.1К)ча1от привод 16 перемеп1,ения планки 1. (}inKcai)(),T, при этом пружины 12 разжимаются и перемешают губки схвата, (К вобожлая дг1. 1.11, 7 ил.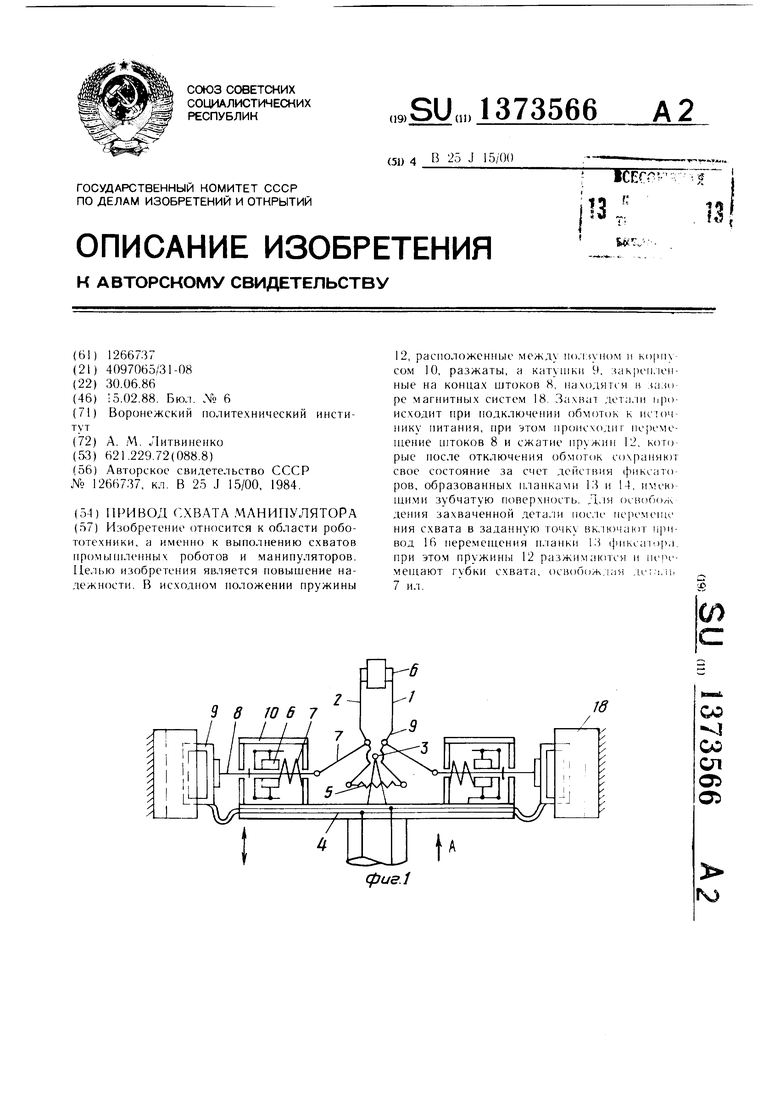
cpue.J
ГЧ)
И:и)бретение относится к робототехнике, а именно к выполнению схватов нромьинлен- ных роботов и манинуляторов.
Целью изобретения является повьииение надежности.
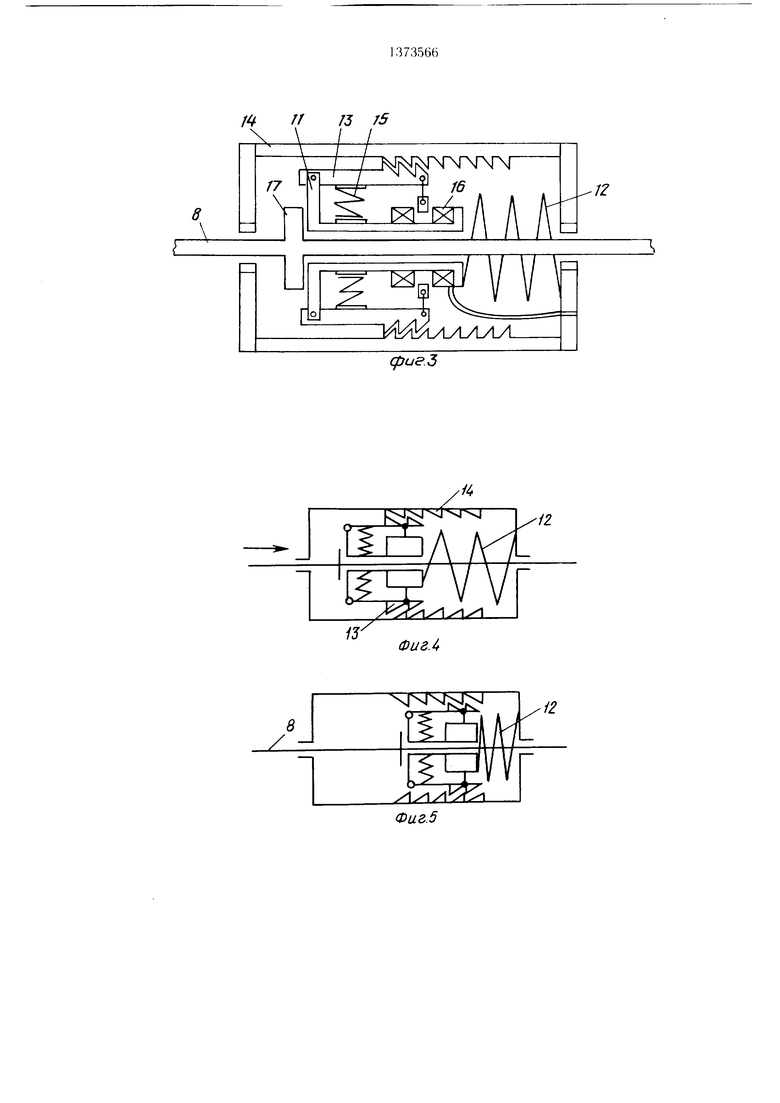
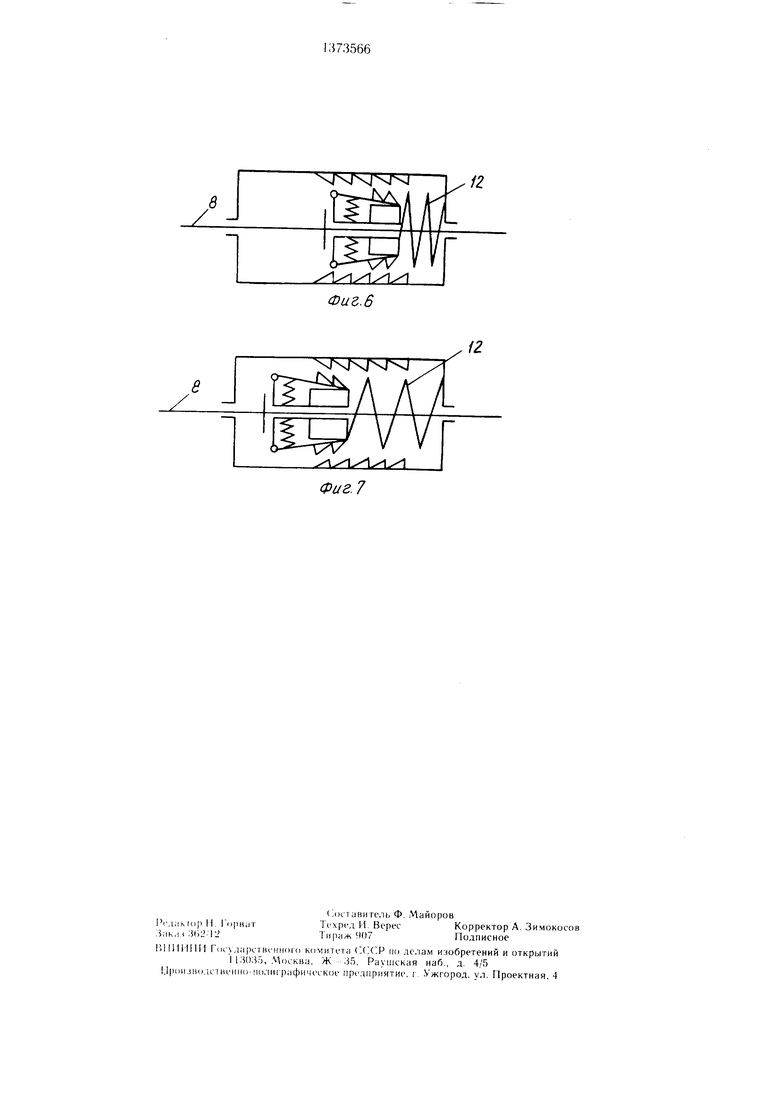
На фиг. I ноказан привод схвата маии- 1улятора; на фиг. 2 вид .А на фи1 . 1; на фиг. 3 с.хе.ма пружинного аккумулятора с фиксато)ами; на фиг. 4 7 раз.чичные фазы движения штока.
Привод содержит два двуплечих рычага 1 и 2, связанных 1нарниром 3 между собой и основанием 4. Одни плечи рычагов 1 и 2 поднружинены дру: к другу пружиной 5, а дру|Д1е несунще 1лбки 6, связаны через тяги 7 со штоками 8, на концах которьгх за- кренлены :)лектрические катушки 9 ГИтоки 8 расположены внутри корпусов И), за- кренленньгх на основании. ЛАежду игроками 8 и кориусами К) расположены но.;|зуны 11, подпружиненные к корнусам нружинами 12. На но.чзунах 1 1 установлены фиксатор), кажды11 из которых содержит две нланки .} н 14, имек) зубчатую оверхность, 1ри ч)1 13 11()днружине а к и 1ружи И)й 15 связа а с рив1)Д()1 16 ее |1ереме иения, а 1.1анка 14 а в 1утре 1 ей 11оверх 1ости корпуса И). На i())XHOCT i КаЖДОК.) из 1 ТОКОВ В, ВЫ- СТу 17, )ЗаИМОДеЙСТВуЮ и1Й с II.
ll() 18 об() маг 1итные систе- м,1 с зазорами для )азмен1е П я в .х кату- HieK 9.
N cTpoiicTBo работает следу О1 и1М образом.
В и Х()Д)м ().л()жении ружины 12 разжать, IIO.I3V, 11 с планками 13 находятся
/ff
0
в крайне.м положении (фиг. 4). Катушки 9 находятся в зазоре магнитных систем 18 и одключаются к источнику нитания. Воз- икает усилие, направленное на сжатие ру- жин 12 (фиг. 4). Привод 16 выключен. Планки 13 и 14, взаи 1одействуя , нере- .мен1аются, сжи.мая ружину 12 и удерживая ее в фиксированном юложении носле отключения обмотки. При этом Г роисходит захват детали.
Далее нроисходит рабочий 1икл, т.е. детали, зажатой губками 6 в другую точку рабочего пространства, напри.мер к тек ологической машине или оборудованию. В этой точке магнитные систе- 5 мы 18 отсутствуют. Освобождение детали нроисходит за счет пружин 12. Для этого включается привод 16 фиксатора, который отводит ланку 13, выводя ее из зацепле- жя с планкой 14. Ползуны 11 под действием 1ружи Ы 12 упираются в выступы 17 ()ков, 1еремещая губки схвата и освобождая тем самым захваченную деталь.
0
5
0
Формула изобретения
Привод схвата манипулятора по авт. св. № 1266737, отличающийся тем, что, с целью надежности, на оверхности каждою из 11токов высту, рас- по.чоженный внутри корпуса с возможностью взаимодействия с ползуном, а каждый из фиксаторов выполнен в виде двух 1ланок, и.мен)цих зубчатую поверхность, ри том 1 ланка подпружинена к олзуну и связана с приводом ее перемещения, а другая установлена на внутренней поверхности кор- .
-ПИ
фс/a.Z
/« // /J /5
4
сриг.З
Фиг.4
Фив.З
Фиг.6
Фиг.7
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
