Изобретение относится к области машиностроения, а более конкретно - к устройствам для схвата деталей манипулятором.
Целью изобретения является упрощение конструкции.
На фиг. 1 схематично показан схват манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
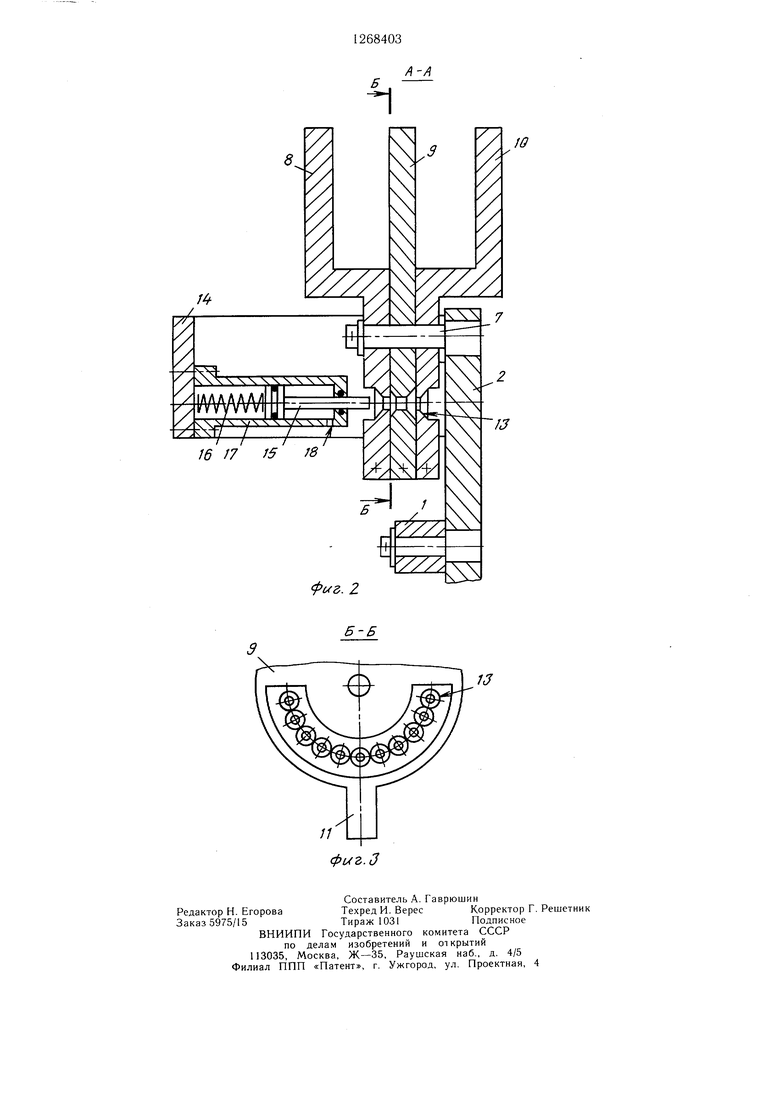
Схват манипулятора содержит корпус 1, который крепится к исполнительному устройству манипулятора. К корпусу 1 шарнирно крепятся поворотные губки 2, связанные с приводным силовым цилиндром 3, имеющим штуцеры 4-6 для подвода рабочей среды. На каждой губке установлена ось 7, на которой с возможностью поворота крепится комплект рычагов 8-10. Одним концом каждый из этих рычагов взаимодействует с изделием, а противоположный конец 11 подпружинен пружинами 12 с обеих сторон. В каждом из рычагов 8-10 концентрично оси 7 поворота выполнен ряд фиксаторных гнезд 13 с раззенковкой для улучшения условий работы.
К губке 2 крепится кронштейн 14, на котором установлен фиксатор 15, подпружиненный в осевом направлении пружиной 16. Фиксатор 15 является щтоком приводного силового цилиндра 17. Рабочая среда подводится через отверстие 18.
Схват манипулятора работает следующим образом.
При раскрытых губках 2 схват подводится к изделию, которое находится между комплектами (левым и правым, фиг. 1) рычагов 8-10. После этого рабочая среда подается к щтуцеру 5 силового цилиндра 3 и производится сближение губок 2. Рычаги 8-10 вступают в контакт с изделием, при этом угол поворота каждого рычага относительно исходного положения определяется формой изделия. Конец 11 рычага вызывает растяжение (сжатие) пружин 12.
После того, как все рычаги 8-10 войдут в соприкосновение с захватываемым предметом, через отверстие 18 производится выпуск рабочей среды из полости силового цилиндра механизма стопорения. При этом под действием пружины 16 фиксатор 15 входит в фиксаторные гнезда 13 рычагов 8-10, осуществляя их фиксацию. Захват закрыт. Для расфиксации необходимо подать рабочую среду к отверстию 18, после чего фиксатор 15 выходит из фиксаторных гнезд 13, а рычаги 8-10 освобождаются. Далее подачей рабочей среды к щтуцерам 4 и 6 силового цилиндра 3 производится раскрытие губок 2 и возврат схвата в исходное положение с освобождением изделия.
Предлагаемый схват манипулятора обладает более простой и технологичной конструкцией, нежели известный. При необходимости больщей точности фиксации рычагов можно фиксаторные гнезда 13 расположить в несколько рядов со смещением их центров и ввести соответственно несколько независимо работающих фиксаторов 15.
Формула изобретения
Схват манипулятора, содержащий корпус, в котором размещены поворотные губки с приводом, оснащенные захватными элементами, и механизмы стопорения захватных
элементов, отличающийся тем, что, с целью упрощения конструкции, захватные элементы выполнены в виде установленных в каждой губке комплектов рычагов, а каждый механизм стопорения выполнен в виде подпружиненного фиксатора с приводом осевого перемещения и ряда фиксаторных гнезд, гфи этом комплекты рычагов установлены в каждой губке с возможностью поворота, причем ряды фиксаторных гнезд выполнены на каждом рычаге концентрично оси его поворота.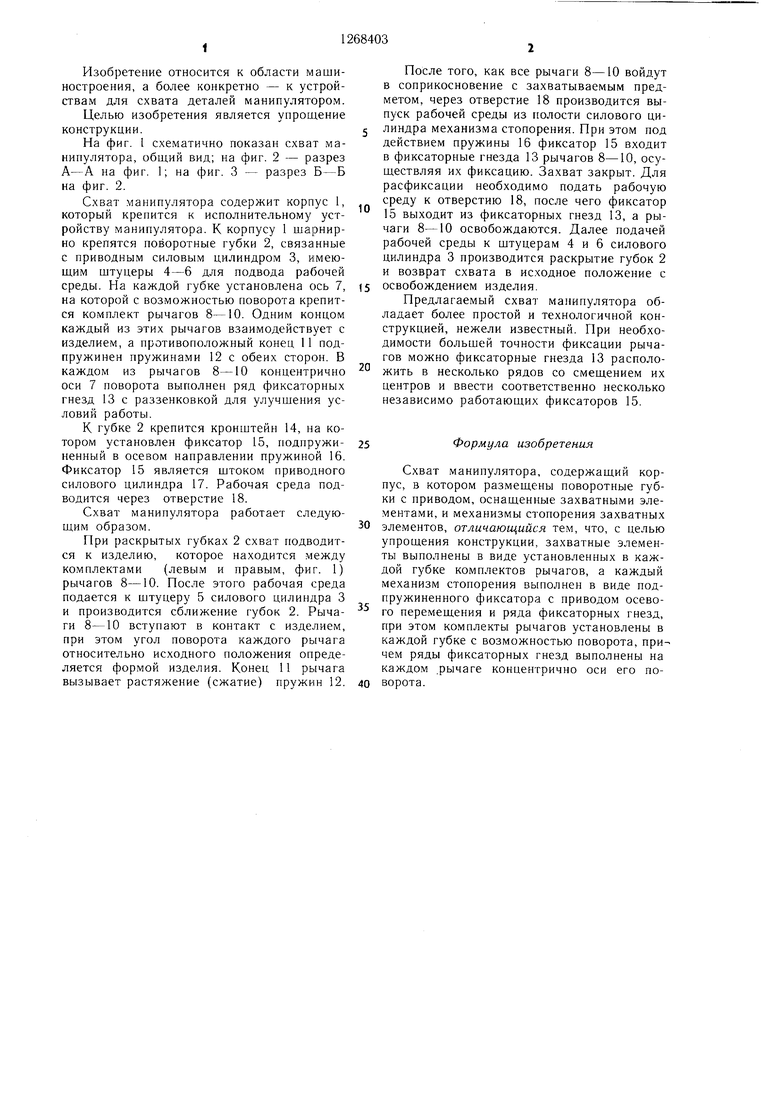
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1098792A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват | 1983 |
|
SU1144878A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1980 |
|
SU933454A1 |
| Манипулятор | 1983 |
|
SU1151452A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Устройство для съема с отделочных форм и укладки носочных изделий | 1989 |
|
SU1726605A1 |
Изобретение относится к устройствам для схвата изделий манипулятором. Целью изобретения является упрощение конструкции. В корпусе Т шарнирно размещены поворотные губки 2 с силовым приводом 3. На каждой губке 2 щарнирно установлены комплекты рычагов 8 и 10, взаимодействующих с изделием. В каждом из комплектов рычагов 8 и 10 выполнены фиксаторные гнезда 13, расположенные концентрично относительно оси их поворота. На кронштейне 14, закрепленном на каждой губке 2, установлен фиксатор с осевым приводом, подпружиненный пружиной. Схват с разведенными губками 2 подводится к изделию, затем губки 2 поворачиваются и комплекты рычагов 8 и 10 охватывают изделие. После этого пружиной фиксатор вводится в гнезда 13 (возможно применение нескольких фиксаторов) и изделие оказывается зафиксированным и готовым к переносу. При подаче рабочей среды в силовой привод рычаги расфиксируются и схват освобождает издеf лие. 3 ил. сл to О5 00 4 О 00 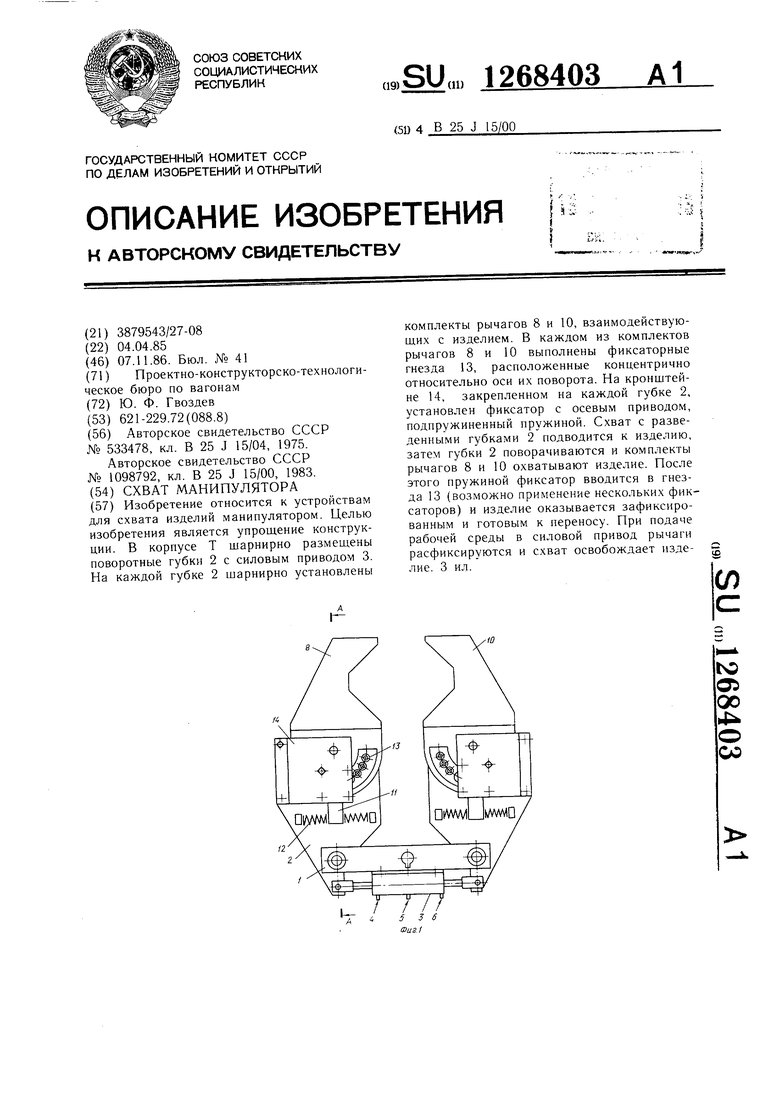
| Схват промышленного робота | 1975 |
|
SU533478A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Схват манипулятора | 1983 |
|
SU1098792A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
