8 33 ял зяп
Фш.1
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов в промышленности стройматериалов.
Целью изобретения является повышение удобства в эксплуатации.
На фиг. 1 представлена кинематическая схема захватного устройства; на фиг. 2 - вилочный захват и толкатели, общий вид; на фиг. 3 - верхняя часть рамы с прижимами.
Захватное устройство включает каркас
1с закрепленной на нем поворотной рамой
2с вилочным захватом 3, толкателем 4 и механизмом управления, содержащим поворотный кожух 5 с четырехпозиционным переключателем 6. Внутри кожуха размещен закрепленный на каркасе скобообраз- ный кронштейн 7, в котором выполнены симметричные направляющие 8 и предназначенные для фиксации положения корпуса пазы 9 переключателя. Боковые стенки корпуса снабжены копирами 10 и 11, а торцовые стенки имеют копиры 12. Поворотная рама 2 кинематически связана с механизмом 13 управления с помощью шарнирно- рычэжной системы, включающей шарнирно закрепленный на раме двуплечий рычаг 14, ролики 15, закрепленные на одной оси, соединенной с рамой тягой 16, и поворотный рычаг 17. жестко связанный с шарнирно закрепленной на каркасе осью 18, на которой размещены собачки 19, одна из которых подпружинена пружиной 20.
В верхней части рама снабжена прижимами 21 (один из которых подпружинен), смонтированными на горизонтальных штангах22, кинематическисвязанныхтягой 23, закрепленной из раме и жестко связанной с рычагом 24, снабженным ползуном 25, предназначенным для взаимодействия с кулисой 26, закрепленной на конце двуплечего рычага 14, другой конец которого снабжен роликом 27, взаимодействующим с боковым копиром 11. В нижней части рамы размещен толкатель 4, снабженный подпружиненными роликами 28, предназначенными для взаимодействия с собачками 19.
Устройство работает следующим образом. ,
При установке переключателя в позицию I рама 2 находится в вертикальном положении, прижимы открыты (расфиксирова- ны) и на вилы захвата 3 устанавливают изделие, например столярный блок. После чего переключатель переводят в позицию II, при этом копир 11 нажимает на ролик 27 двуплечего рычага 14, закрепленного на раме с помощью оси 29, поворачивая его (рычаг) по часовой стрелке, в результате чего
перемещается кулиса 26 рычага, увлекая за собой ползун 25, шарнирно закрепленный на рычаге 24, при этом рычаг 24 увлекает за собой жестко связанную с ним тягу 23, приводящую, в свою очередь, в движение горизонтальные штанги 22 с закрепленными на них прижимами, фиксирующими изделие (фиг. 3, положение AI). При этом пружина 30, связанная с одним из прижимов и соеди0 ненная с рычагом 24, одновременно обеспечивает прижатие ролика 27 к боковому копиру 12 и фиксацию изделия прижимами. После чего переключатель переводят в позицию III, при этом поворотный кожух, по5 ворачиваясь вокруг оси 31 против часовой стрелки, нажимает торцовой поверхностью копира 12 на ролики 15 и соединенная с осью роликов и с рамой с помощью шарнира 32 тяга 16, перемещаясь, поворачивает раму
0 против часовой стрелки, переводя ее в наклонное положение (фиг. 4) , а ползуны 33, увлекаемые роликами 15, перемещаются в направляющих 8, обеспечивая направление движения роликов по копирной поверхно5 сти. при этом контакт роликов с копирной поверхностью корпуса обеспечивается пружиной 34, закрепленной между осью 35 роликов 15 и осью 31 поворота корпуса. В этом положении изделие подается к месту уста0 новки, а перг-кпючэтель возвращается в позицию II. При этом поворотный корпус поворачивается вокруг оси 31 по часовой стречке, пружина 34 прижимает ролики 15 к копиру 12 с одновременным перемещением
5 ползунов в направляющих и тяги 16, переводящей раму в вертикальное положение. После чего переключатель возвращается в позицию IV через позицию I, ролик 7 входит в контакт с копиром 11, в результате
0 чего двуплечий рычаг поворачивается против часовой стрелки и через кулису и ползун поворачивает рычаг 24 с жестко связанной с ним тягой 23, перемещая штанги 22 с закрепленными на них прижимами 21 и рас5 фиксируя изделия (фиг. 3, положение Аа). При фиксации переключателя в позиции IV осуществляют поворот корпуса по часовой стрелке, нажимающего торцовой поверхностью копира 12 на ролики 15. Под действием
0 тяги 16 рама поворачивается по часовой стрелке на некоторый угол. Одновременно боковой копир 10, взаимодействуя с роликом 36, приводит в движение через рычаг 17 собачки i9, взаимодействием которых с
5 подпружиненными роликами 28 толкателя осуществляется сталкивание изделия с рамы.
Таким образом, снятие изделия с рамы происходит в результате поворота рамы и перемещения толкателя.
Захватное устройство может быть установлено на манипуляторе. Механизм управления захватного устройства позволяет оператору одновременно управлять манипулятором и захватом.
Формула изобретения Захватное устройство, содержащее каркас, закрепленную на каркасе поворотную раму с вилочные захватом, толкатель и механизм управления вилочным захватом, отличающееся тем, что, с целью повышения удобств в эксплуатации, механизм управления вилочным захватом включает в себя усыновленный н.э каркасе поворотный полый кожух с позиционным переключателем и копирами на боковых и торцовых стенках, размещенный внутри кожуха и жестко закрепленный на оаме кронштейн, выполненный с симметричными пазами для переключателя и поправляющими, и размещенные в направляющих ползуны, а устройство снабжено двуплечим рычагом, закрепленными на его плечах кулисой
и роликами для вэаимодейс ьия с одним чч боковых копиров, установленными на ползунах посредством подпружиьенной относительно оси поворота кожуха оси вторыми
соог.но закрепленными роликами для взаимодействия с торцовыми копирами, поворотным рычагом с роликом для взаимодействия с вторым боковым копиром, жестко связанной с поворотным рычггом.расположенной перпендикулярно ему и шар- нирно закрепленной на каркасе штангой с собачками, размещенными в верхней части рамы прижимами для грузз, один из которых подпружинен, связанными с прижимами горизонтальными штангами и кинематически связанной с последними и закрепленной на раме тягой, шарнирно связанной с рычагом, выполненным с ползушкой для взаимодействия с кулисой
двуплечего рычага, при этом толкатель представляет собой закрепленные в нижней части рамы ролики, размещенные с возможностью взаимодействия с собачками.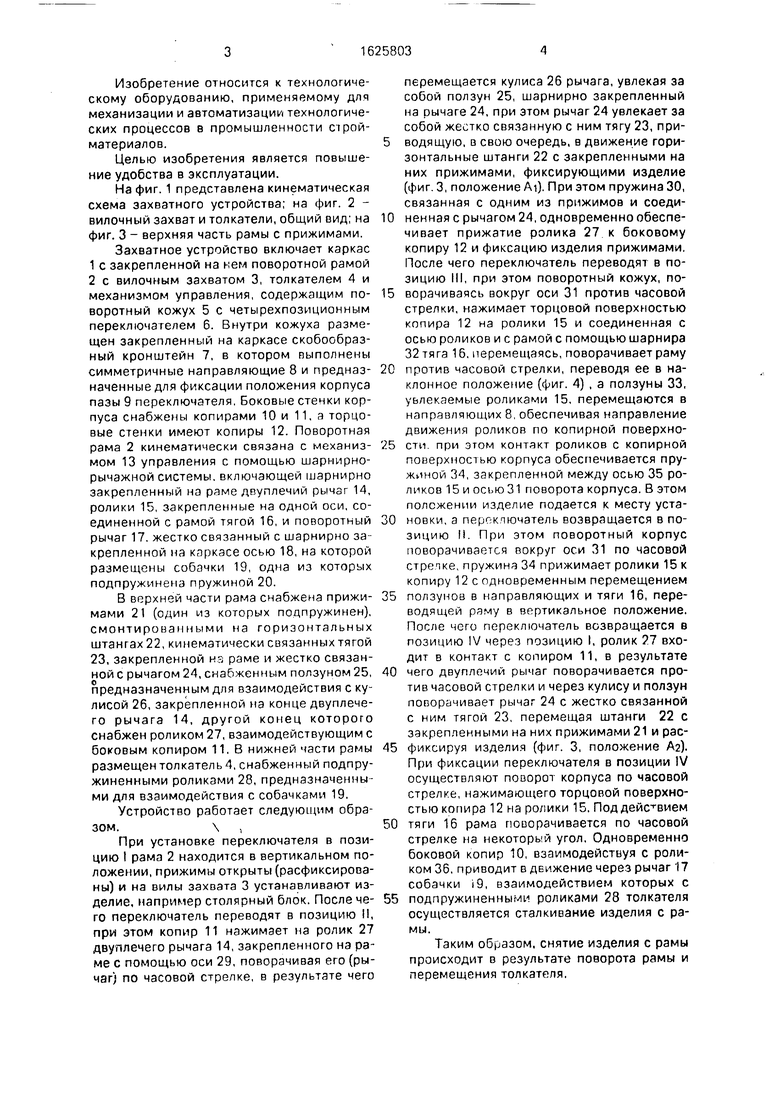

| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автомат изготовления электрических катушек | 1987 |
|
SU1573478A1 |
| Установка для изготовления теплоизоляционных плит из пенопласта | 1989 |
|
SU1729782A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Карусельная формовочная установка | 1982 |
|
SU1106658A1 |
| Устройство для упаковки стержнеобразных изделий | 1974 |
|
SU524737A1 |
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов, а именно к захватным устройствам для подачи, транспортировки, укладки и монтажа строительных изделий. Целью изобретения является повышение удобства эксплуатации. Захватное устройство включает закрепленную на каркасе поворотную раму 2 с вилочным захватом 3 толкателем 4 и механизмом управления. Последней содержит поворотный кожух 5 с четырехпозиционным переключателем 6. В кожухе 5 размещен жестко связанный с каркасом 1 скобообразный кронштейн 7 о направляющими 8 и расположенными на боковых и торцовых стенках копирами 10- 12. Кинематическая связь рамы с механизмом управления представляет собой шар- кирно-рычажную систему. Рама 2 снабжена прижимами 21 с горизонтальными штангами 22. Толкатель выполнен с закрепленными на раме 2 подпружиненными роликами 28, кинематически связанными с механизмом управления. 3 ил.
Фие.З
| Крановый вилочный захват для погрузки штабелей штучных грузов | 1974 |
|
SU533541A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
