1
Изобретение относится к машиностроению, а именно к роботам,работащим в комплексе с тяжелыми листо- штамповочными прессами.
Цель изобретения - упрощение конструкции и повьшение точности пози- ционирования.
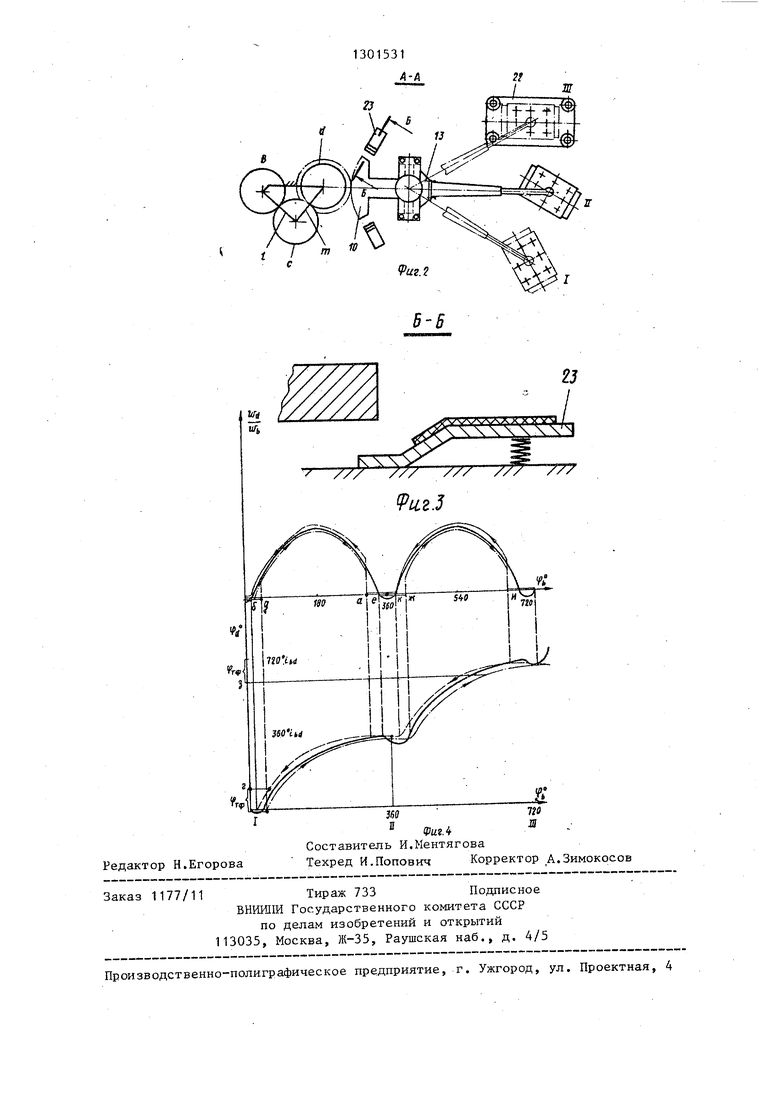
На фиг. 1 схематично изображено предлагаемое устройство, общий вид, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 7, н фиг, 4 - функции изменения скорости и угла поворота ведомого звена меха низма в зависимости от угла поворот ведущего звена и направления его врщения .
Робот содержит неподвижную станину 1, поворотную раму 2, вращающуюс в подшипниках 3 и 4 станины, привод который содержит двигатель 5, ременную передачу 6, редуктор 7 и зубчат рычажный механизм 8 трехколесного четырехзвенника. Вал двигателя 5 соединен с ведуощм валом редуктора ременной передачей 6. Выходной вал .редуктора соединен с кривошипом b механизма 8 трехколесного четырехзвенника. Кривошип b через шатун е, коромысла m и шестерню с соединен с выходным звеном d механизма трехколесного четырехзвенника. На выходно вал d механизма 8 посажена шестерн
9,входящая в зацепление с сектором
10,закрепленным на раме 2. В направляющих рамы 2 установлена каретк
11,перемещаемая по вертикали цилин 12. На каретке 11 с помощью бол 13 и шарнира 14 установлена русое тоящая из стрелы 15 и штока закрепленного болтами 17 в клеммах 18. На конце штока закреплена плита 19 с отверстиями, ддя креплени магнитов 20, которыми подхватываетс листовая заготовка 21, Позищсей 22 обозначен штамп, В крайних положениях поворотная рама вместе с рукой фиксируется неуправляе1 1ым тормозом 2
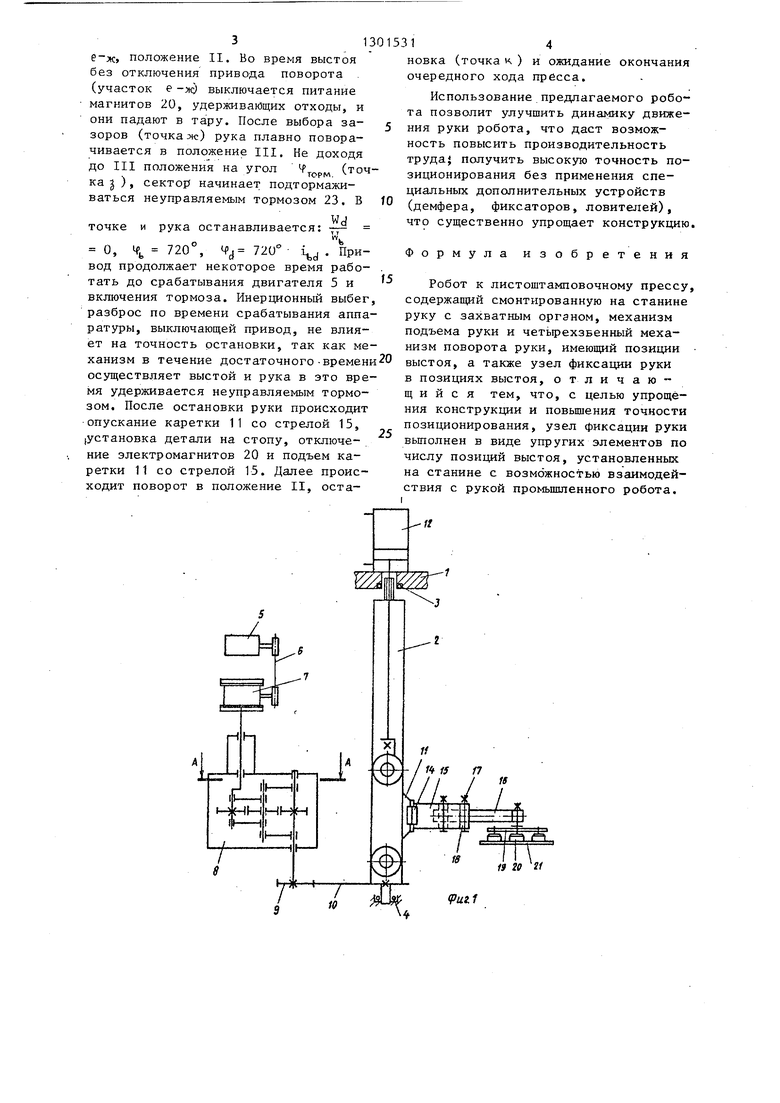
Рука робота имеет следующие фиксированные по углу поворота позиции (фиг. 2):
I- положение руки над стопой заготовок J
II- рука над тарой для отходов,
III рука над штампом.
ром тов ка, 16,
-р - угол поворота ведущего звена угол поворота вы- d Jii
b чение передаточного числа зубчатомеханизма, ходного Bai:a,
мгновенное зна
5
0
5
рычажного механизма трехколесного четырехзвенника, i. j - среднее передаточное число за оборот (фиг. 4). Стрелками на графиках показано направление изменения величин. Без стрелок изображены теоретические характеристики.
Робот работает следующим образом.
Исходным положением является положение II. Положение II соответствует f 360°, d 360° i,j, bbd
0 (фиг. 4). После хода ползуна
b
пресса в момент его остановки в верхней мертвой точке включается привод поворота рамы 2 и рама вместе с кареткой 11 и рукой двигается в положение I. На фиг. 4 этому соответствует выстой механизма до выбора зазоров в соединениях, соответствуюш;их точке о. , плавный разгон и остановка. В точке а изображен разрыв функции скорости, что объясняется некоторым разгоном ведущих звеньев в ходе выбора зазора. Не доходя до положения I на угол . (точка г по характеристике), узел поворота руки, в данном случае сектор 10, начинает подтормаживаться нeyпpaвляe ым тор- 0 мозом 23. В точке S рука останавлиW., вается -
ь удерживается неуправляемым тормозом.
Привод же продолжает некоторое вра-
5 мя работать до срабатывания датчика отключения двигателя 5 и включения тормоза. Этот датчик расположен на ведущем звене зубчаторычажного механизма трехколесного четырехзвенни0 ка. Инерционный выбег, разброс по времени срабатывания аппарат фы, выключающей привод, не влияет на точность остановки, так как механизм в течение достаточного времени осуJ ществляет выстой и рука в это время удерживается неуправляемым тормозом. В положении I каретка 11 с рукой опз скается, включается питание электромагнитов 20, притягивающих деталь
с и отходы, затем происходит подъем каретки со стрелой, отштампованной деталью и отходами, и стрела движется в положение II, На фиг. 4 этому соответствует выстой механизма до
J выбора зазоров в соединении в сторону, обратную предыдущему движению.
О, Pj О
Зазор выбирается до точки Э , затем
происходит плавный ка руки - точка 6
разгон и останов- , выстой - участок
положение II. Во время выстоя без отключения привода поворота (участок е-ж) выключается питание магнитов 20, удерживающих отходы, и они падают в тару. После выбора зазоров (точка зге) рука плавно поворачивается в положение III. Не доходя до III положения на угол у,рм (точ ка J ), сектор начинает подтормаживаться неуправляемым тормозом 23. В
Wd
рука останавливается:
о
точке и
ь
0, 720, 4) . Привод продолжает некоторое время рабо- тать до срабатывания двигателя 5 и включения тормоза. Инерционный выбег разброс по времени срабатывания аппаратуры, выключающей привод, не влияет на точность остановки, так как механизм в течение достаточного-времен осуществляет выстой и рука в это время удерживается неуправляемым тормозом. После остановки руки происходит опускание каретки 11 со стрелой 15, (Установка детали на стопу, отключение электромагнитов 20 и подъем каретки 11 со стрелой 15. Далее происходит поворот в положение II, оста
O
0
5
новка (точка к) и ожидание окончания очередного хода пресса.
Использование предлагаемого робота позволит улучшить динамику движения руки робота, что даст возможность повысить производительность труда} получить высокую точность позиционирования без применения специальных дополнительных устройств (демфера, фиксаторов, ловителей), что существенно упрощает конструкцию.
Формула изобретения
Робот к листоштамповочному прессу, содержащий смонтированную на станине руку с захватным органом, механизм подъема руки и четьфехзвенный механизм поворота руки, имеющий позиции выстоя, а также узел фиксации руки в позициях выстоя, отличающийся тем, что, с целью упрощения конструкции и повышения точности позиционирования, узел фиксации руки выполнен в виде упругих элементов по числу позиций выстоя, установленных на станине с возможностью взаимодействия с рукой промьшшенного робота.
лг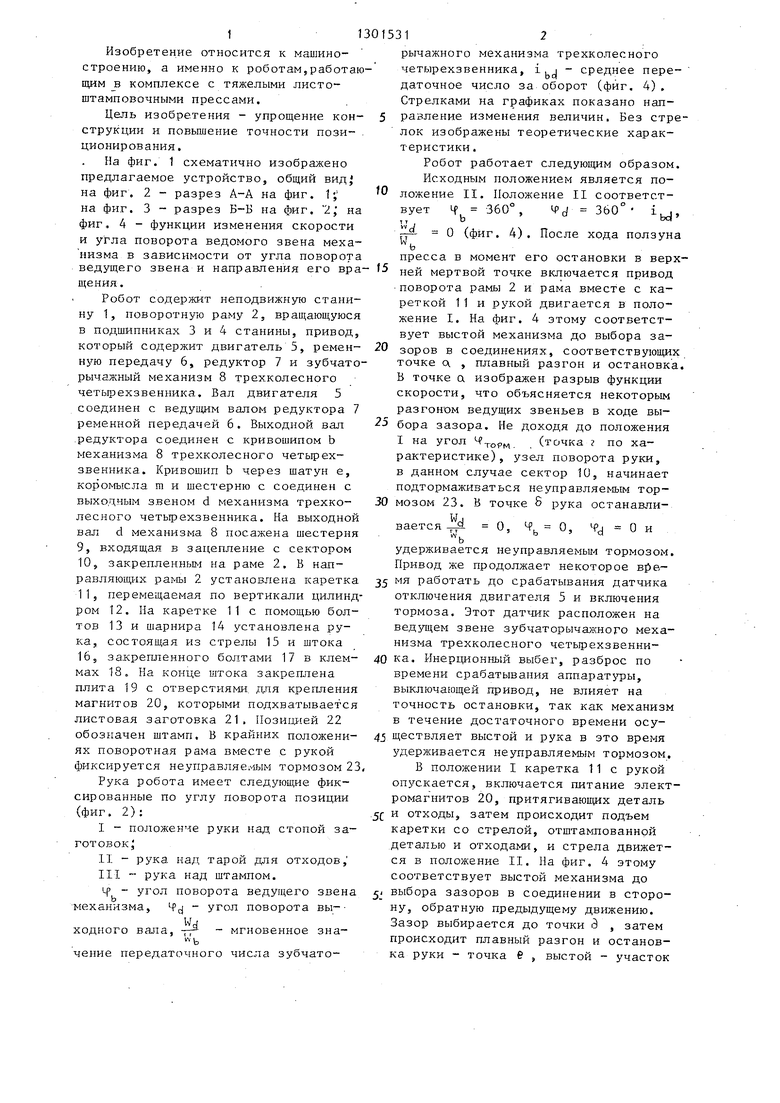
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1984 |
|
SU1268252A1 |
| Привод механизма с длительным выстоем выходного звена | 1988 |
|
SU1593772A1 |
| Станок для фасонного строгания | 1982 |
|
SU1077720A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| УСТРОЙСТВО для ПОДАЧИ ЗАГОТОВОК В РАБОЧУЮ ЗОНУ ПРЕССА И УДАЛЕНИЯ ИЗ НЕБ ОТШТАМПОВАННЫХДЕТАЛЕЙ | 1972 |
|
SU421545A1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ КОНИЧЕСКОЙ РЕЗЬБЫ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО РЕЗЬБОВОГО УЧАСТКА НЕФТЕПРОМЫСЛОВОЙ ТРУБЫ, И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302934C2 |
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |
Изобретение относится к машиностроению, а именно к роботам. Изобретение может быть использовано в ро- бототехнических комплексах листовой штамповки. Изобретение решает задачу плавной и точной установки листовых заготовок в штамп пресса, снятия и стапелирования деталей, а также сброса отходов. Целью изобретения являются упрощение конструкции робота и повышение точности позиционирования его руки при одновременном обеспечении плавнрго перемещения заготовок. Робот состоит из станины, . руки (Р) с электромагнитами, привода подъема Р, привода поворота Р, включающего зубчато-рычажный механизм (ЗРИ) трехколесного четырехзвенника с выстоем ведомого звена и неуправляемых тормозов, установленных в крайних по углу поворота положениях Р. и взаимодействующих с последним звеном привода поворота либо непосредственно с Р. Использование ЗРМ трехколесного четьфехзвенника позволяет осуществлять желаемый (приближенно синусоидальный) закон поворота Р робота, а наличие неуправляемых тормозов в крайних по углу поворота положениях Р позволяет точно фиксировать Р в доложениях установки заготовки в Щтамп, взятия заготовки из стопы, снятия отштампованной детали со штампа и стапелирования деталей. В эти моменты ведомое звено ЗРМ трехколесного, четырехзвенника осуществляет выстой. 4 ил.. с ел оо о СП ОО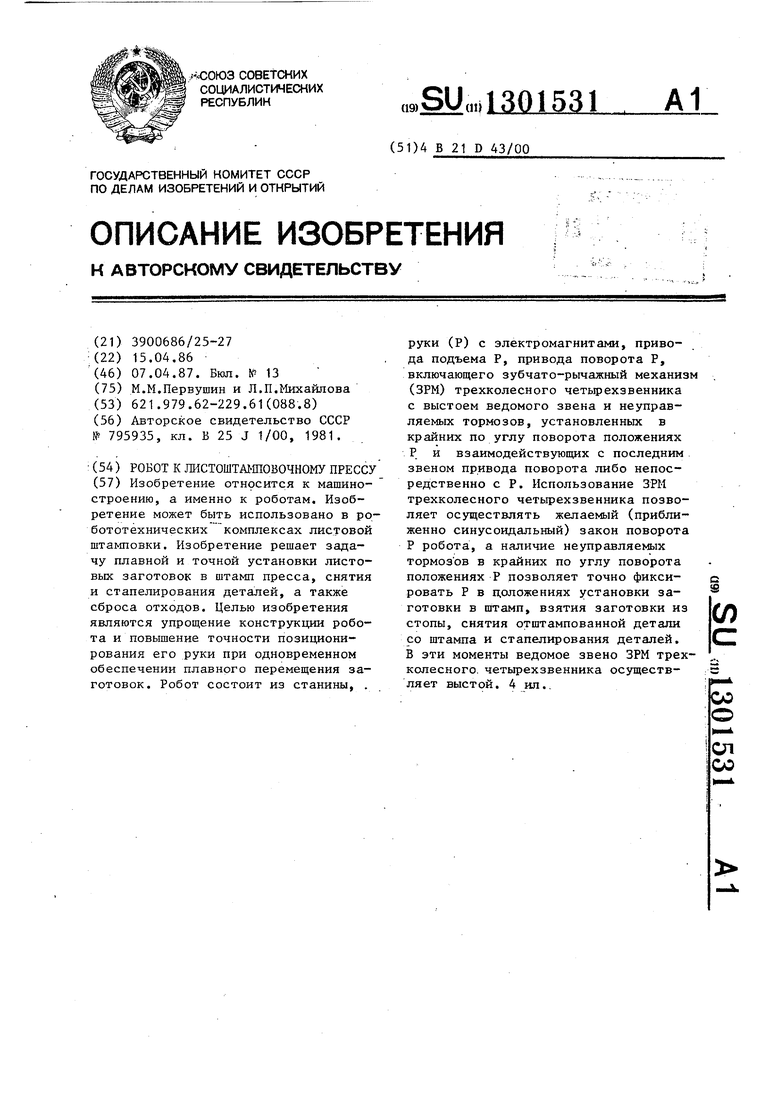
Редактор Н.Егорова
фцг.4 Составитель И.Ментягова
Техред И.Попович Корректор А.Зимокосов
23
STVNXNTVXA. JC X У УЛЛ /
УЧЧУХХУ Ч
1177/11
Тираж 733Подписное
ВНИИ11И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
