Изобретение относится к системам автоматического управления и может быть использовано для управления положением заготовок или режущих органов деревообрабатывающих станков.
ИЗВестен следящий привод для управления .положением пил деревообрабатывающих станков, содержащий измерительное устройство и последовательно соединенные задающее и суммирующее устройства, дешифратор, блок усилителей, гидрораспределитель и исполнительный орган. Однако известные следящие приводы не обладают достаточной точностью установки лилы на размер и надежностью.
Цель изобретения - создание более точного и надежного реверсивного следящего лривода для многопнльных станков.
Это достигается тем, что измерительное устройство состоит 1ИЗ датчика импульсов и реверсивного счетчика, .первый вход которого через датчик импульсов соединен с выходом исполнительного органа, второй вход соединен со вторым выходом дешифратора, а выход соединен со вторым входом сум.мирующего устройства.
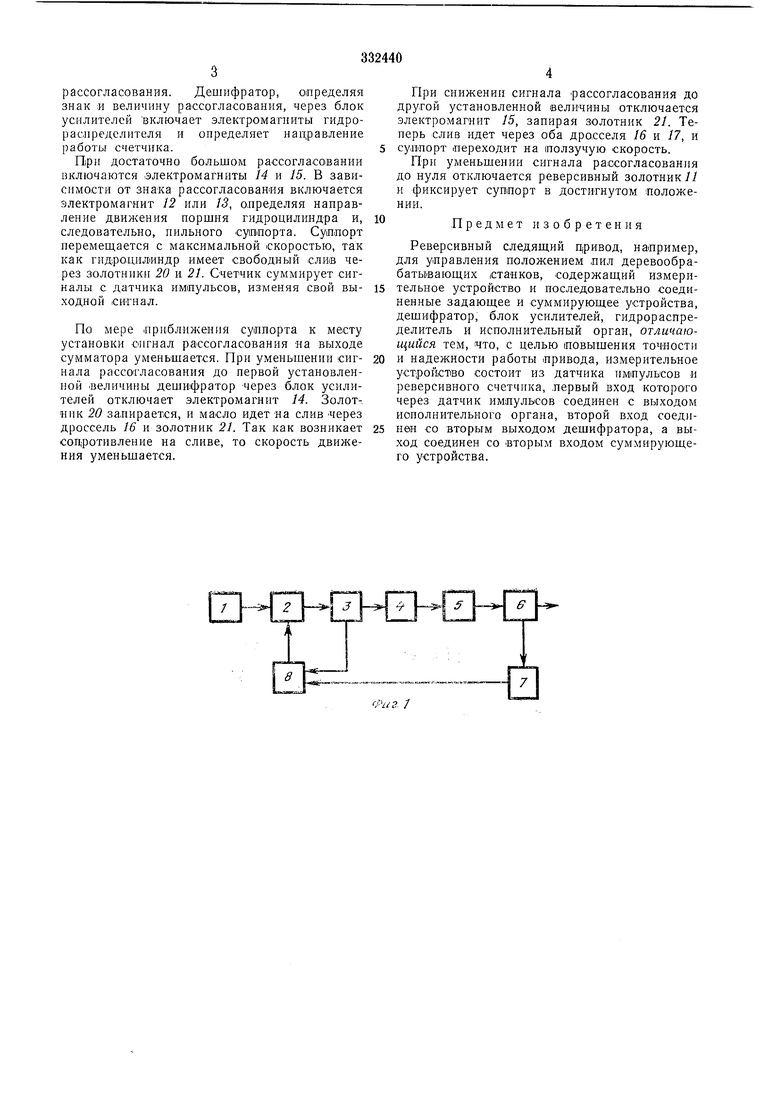
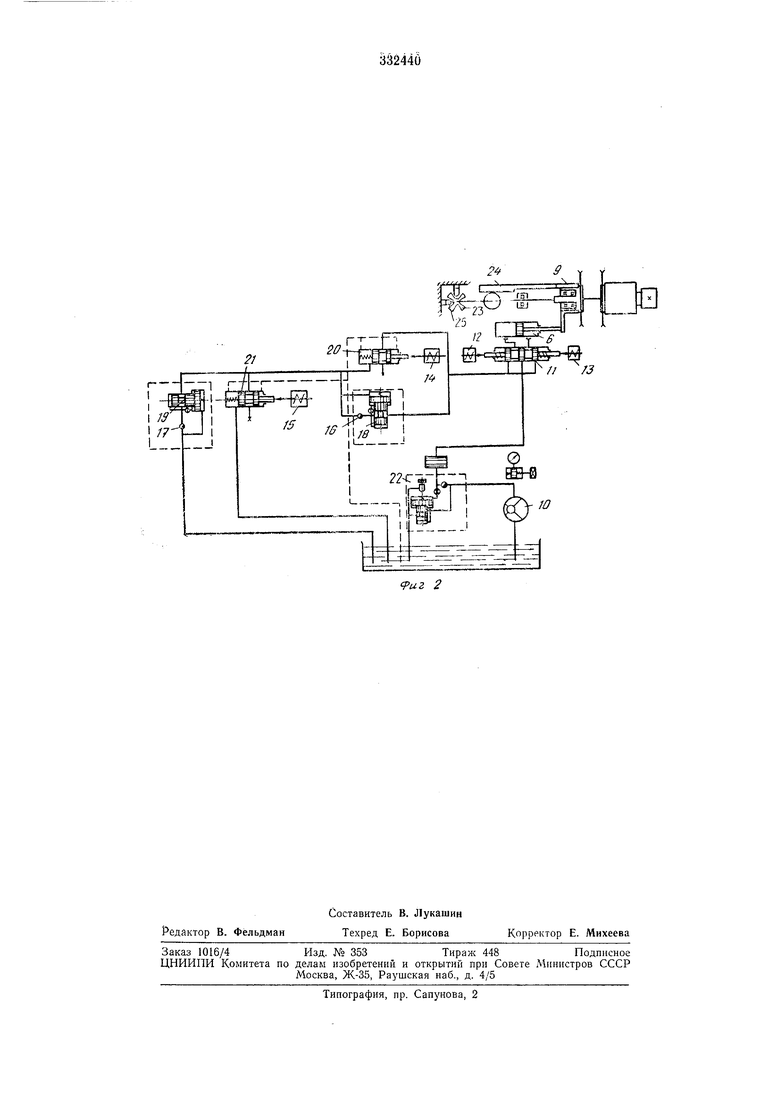
На фиг. 1 представлена блок-схема; на фиг. 2 - гидрокинематическая схема привода.
щифратор 3, блок 4 усилителей, гидрораслределитель 5, исполнительный орган 6, датчик/ импульсов, и реверсивный счетчик 8.
Гидрокинематическая схема привода содержит силовой цилиндр (исполнительный орган) 6, лильный суппорт 9, гидронасос 10, реверсивный трехпоз1щлонный золотник 11, электромагниты 12-15, дроссели 16, 77, регуляторы 18, 19 давления, двухходовые золотникн 20, 21, предохранительный клапан 22, алюминиевый диск 23, реечный редуктор 24, бесконтактные (выключатели 25.
Привод работает следующим образом.
В статическом состоянии привода выходной сигнал задающего устройства равен сигналу измерительного устройства, т. е. выходному сигналу реверсивного счетчика, и на гидрораспределитель сигнала не подается. Электромагниты гидрораспределителя обесточены, реверсивный золотник на.ходится в нейтральном положении и отсекает гидроцилпндр от напорной магистрали.
Гидрораспределптель включает в себя трехП031ЩИОННЫЙ реверсивный золотник 11с электрическим уцравлением, два дросселя 16, 17 с регуляторами 18, 19 давления и два двухходовых золотника 20, 21 с электромагнитами 14, 15.
рассогласования. Дешифратор, определяя знак и величину рассогласования, через блок усилителей включает электромапшты гидрорасиределителя и определяет нацравление работы счетчика.
При достаточно большом рассогласовании включаются 1электромагниты 14 и 15. В зависимости от знака рассогласования включается электромагнит 12 или 13, олределяя направление движения иоршня гидроцилиндра и, следовательно, нильного сугапорта. Суппорт иеремеш,ается с максимальной скоростью, так как гид;ро.цил1индр имеет свободный слив через золотники 20 и 21. Счетчик суммирует сигналы с датчика импульсов, изменяя свой выходной сигнал.
По мере приближения суппорта к месту установки сигнал рассогласования яа выходе сумматора уменьшается. При уменьшении сигнала рассогласования до первой установленной величины дешифратор через блок усилителей отключает электромагнит 14. Золотник 20 запирается, и масло идет яа слив через дроссель 16 и золотник 21. Так как возникает соЦротивление на сливе, то скорость движения уменьшается.
При снижении сигнала рассогласования до другой установленной величины отключается электромагнит 15, запирая золотник 21. Теперь слив идет через оба дросселя 16 и 17, и суппорт переходит на ползучую скорость.
При уменьашпии сигнала рассогласования до нуля отключается реверсивный золотник У/ и фиксирует суппорт в достигнутом положении.
Предмет изобретения
Реверсивный следяш,ий цривод, например, для управления положением пил деревообрабатывающих станков, содержащий измерительное устройство и последовательно соединенные задающее и суммирующее устройства, дешифратор, блок усилителей, гидрораспределитель и исполнительный оргая, отличающийся тем, что, с целью повышения точности и надежности работы привода, измерительное устрой.ст1во состоит из датчика импульсов и реверсивного счетчика, .первый вход которого через датчик импульсов соединен с выходом иополиительного органа, второй вход соединен со вторым выходом дешифратора, а выход соединен со вторым входом суммирующего устройства.
//л. / /.-; //
иг 2 /J
