4 СД
СО 4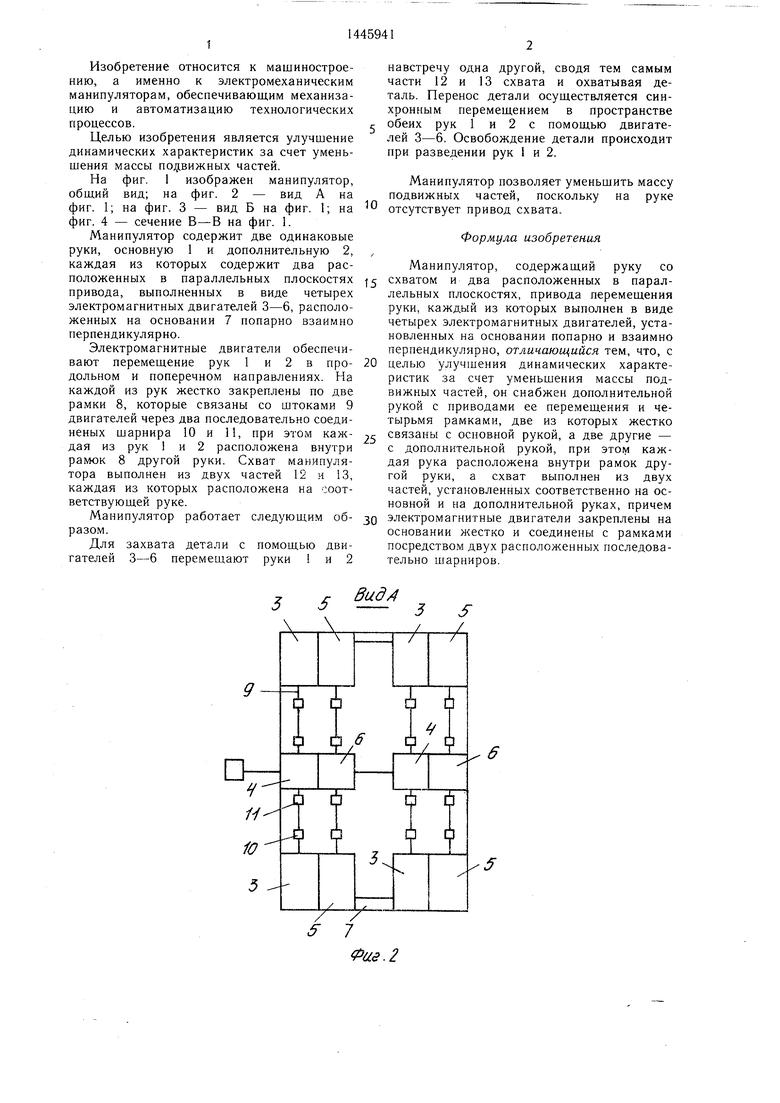
| название | год | авторы | номер документа |
|---|---|---|---|
| Артикулятор | 2017 |
|
RU2671029C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Схват для сборки радиодеталей | 1979 |
|
SU812568A1 |
| Манипулятор | 1984 |
|
SU1269990A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Манипулятор | 1988 |
|
SU1569223A1 |
| Схват манипулятора | 1982 |
|
SU1042993A1 |
| Электромагнитное захватное устройство манипулятора | 1988 |
|
SU1641611A1 |
Изобретение относится к машиностроению, а именно к электромеханическим манипуляторам, обеспечивающим механизацию и автоматизацию технологических процессов. Целью изобретения является улучшение динамических характеристик за счет уменьшения массы подвижных частей. Захват детали происходит при сближении рук 1 и 2, несуших части 12 и 13 схвата, посредством электромагнитных двигателей 3, 4, 5 и 6, закрепленных на основании. Перенос детали осуществляется при синхронном перемещении рук 1 и 2 от этих же двигателей. Для освобождения детали руки 1 и 2 расходятся. 4 ил.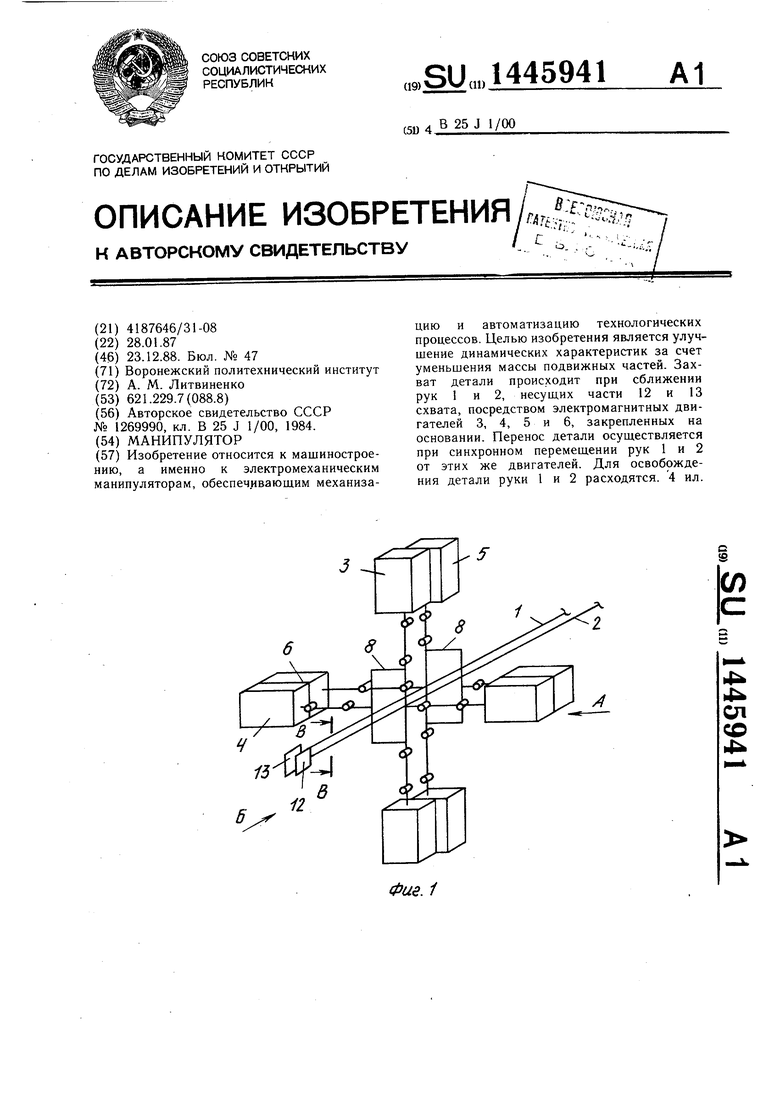
Фие. 1
Изобретение относится к машиностроению, а именно к электромеханическим манипуляторам, обеспечивающим механизацию и автоматизацию технологических процессов.
Целью изобретения является улучшение динамических характеристик за счет уменьшения массы подвижных частей.
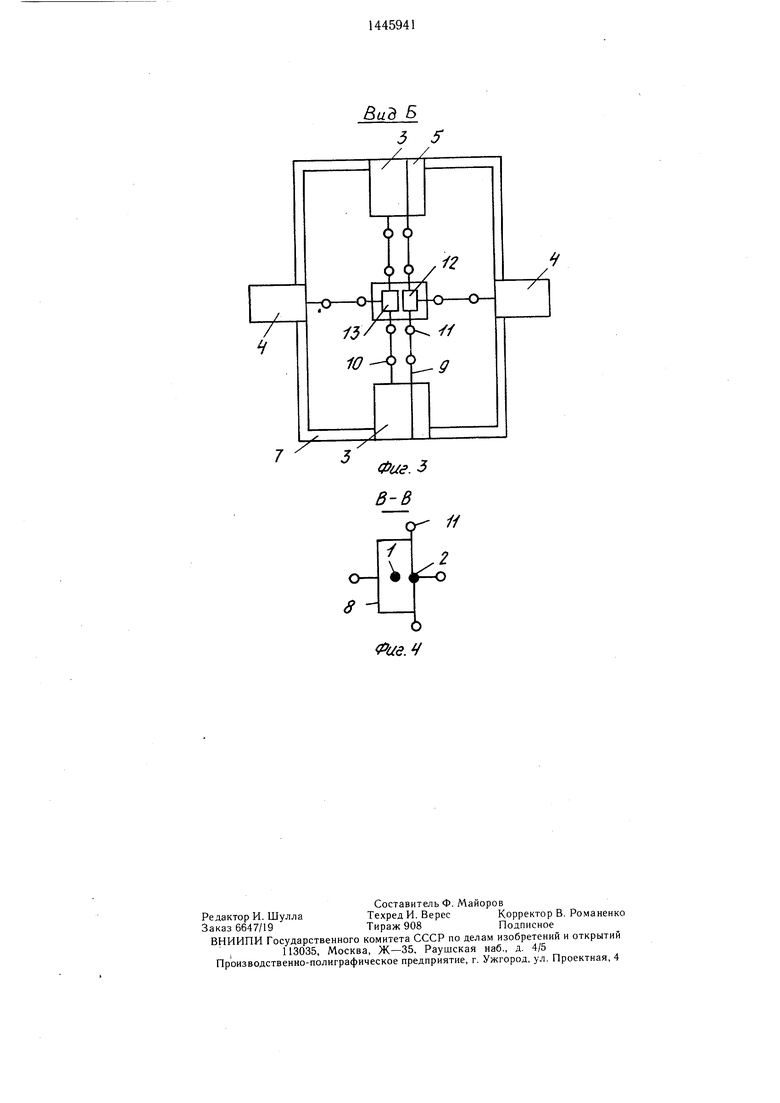
На фиг. 1 изображен манипулятор, обш.ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1.
Манипулятор содержит две одинаковые руки, основную 1 и дополнительную 2, каждая из которых содержит два расположенных в параллельных плоскостях привода, выполненных в виде четырех электромагнитных двигателей 3-6, расположенных на основании 7 попарно взаимно перпендикулярно.
Электромагнитные двигатели обеспечивают перемещение рук 1 и 2 в продольном и поперечном направлениях. На каждой из рук жестко закреплены по две рамки 8, которые связаны со штоками 9 двигателей через два последовательно соеди- неных шарнира 10 и И, при этом каждая из рук 1 и 2 расположена внутри рамок 8 другой руки. Схват манипулятора выполнен из двух частей 12 и 13, каждая из которых расположена на соответствующей руке.
Манипулятор работает следующим образом.
Для захвата детали с помощью двигателей 3-6 перемещают руки 1 и 2
навстречу одна другой, сводя тем самым части 12 и 13 схвата и охватывая деталь. Перенос детали осуществляется синхронным перемещением в пространстве обеих рук 1 и 2 с помощью двигателей 3-6. Освобождение детали происходит при разведении рук 1 и 2.
Манипулятор позволяет уменьшить массу подвижных частей, поскольку на руке отсутствует привод схвата.
Формула изобретения
Манипулятор, содержащий руку со
J5 схватом и два расположенных в параллельных плоскостях, привода перемещения руки, каждый из которых выполнен в виде четырех электромагнитных двигателей, установленных на основании попарно и взаимно перпендикулярно, отличающийся тем, что, с
20 целью улучшения динамических характеристик за счет уменьшения массы подвижных частей, он снабжен дополнительной рукой с приводами ее перемещения и четырьмя рамками, две из которых жестко
25 связаны с основной рукой, а две другие - с дополнительной рукой, при этом каждая рука расположена внутри рамок другой руки, а схват выполнен из двух частей, установленных соответственно на основной и на дополнительной руках, причем
30 электромагнитные двигатели закреплены на основании жестко и соединены с рамками посредством двух расположенных последовательно шарниров.
ид/1
Фае. 2
Вид Б
| Манипулятор | 1984 |
|
SU1269990A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
