сл
р1 со
СО
оо
Фи9.9
осуществляется с помощью электродвигателей 7, которые установлены на корпусе и сдвинуты один относительно другого на угол 9U . Выдвижение руки в продольном направлении осуществляется электродвигателями 13,которые, в свою очередь, могут выдвигаться и вдвигаться электродвигателями 11. b ил.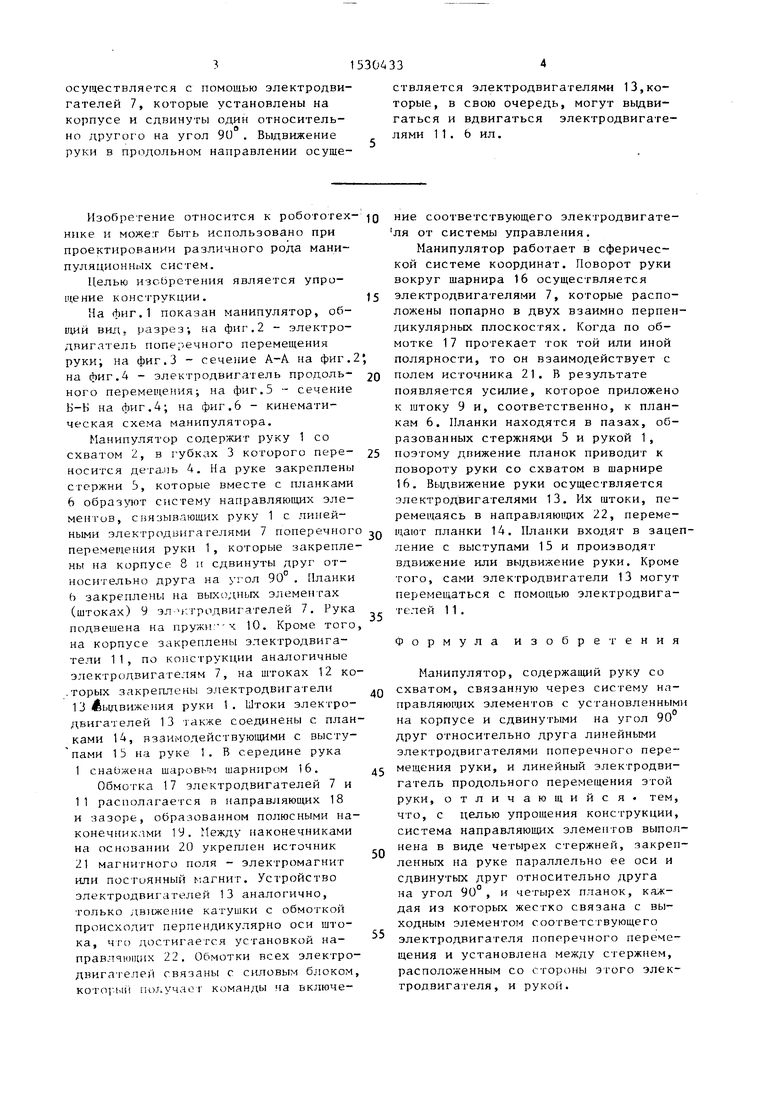
| название | год | авторы | номер документа |
|---|---|---|---|
| Артикулятор | 2017 |
|
RU2671029C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Мостовой кран-манипулятор | 1987 |
|
SU1426778A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
Изобретение относится к робототехнике и может быть использовано при проектировании различного рода манипуляционных систем. Целью изобретения является упрощение конструкции. Манипулятор работает в сферической системе координат. При этом поворот руки 1 в шаровом шарнире 16 осуществляется с помощью электродвигателей 7, которые установлены на корпусе и сдвинуты одни относительно другого на угол 90°. Выдвижение руки в продольном направлении осуществляется электродвигателями 13, которые в свою очередь могут выдвигаться и вдвигаться электродвигателями 11. 6 ил.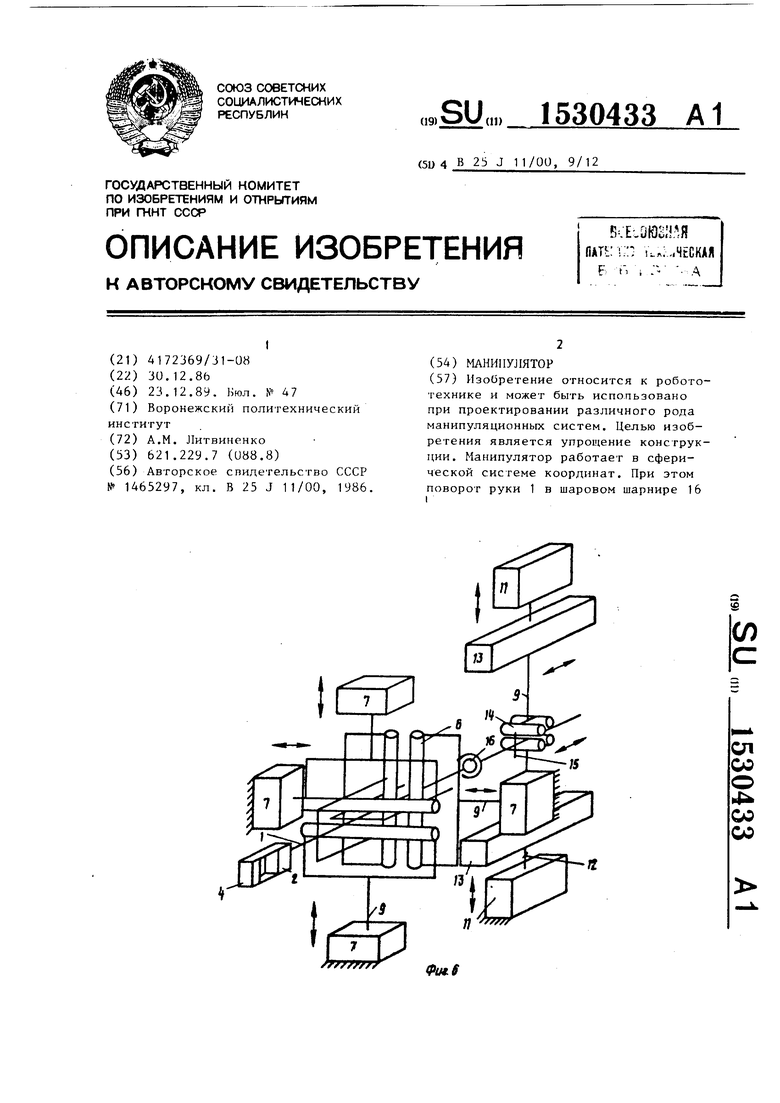
Изобретение относится к робототех нике и може.т быть использовано при проектировании различного рода мани- пуляционнь1х систем.
Целью изобретения является упрощение конструкции.
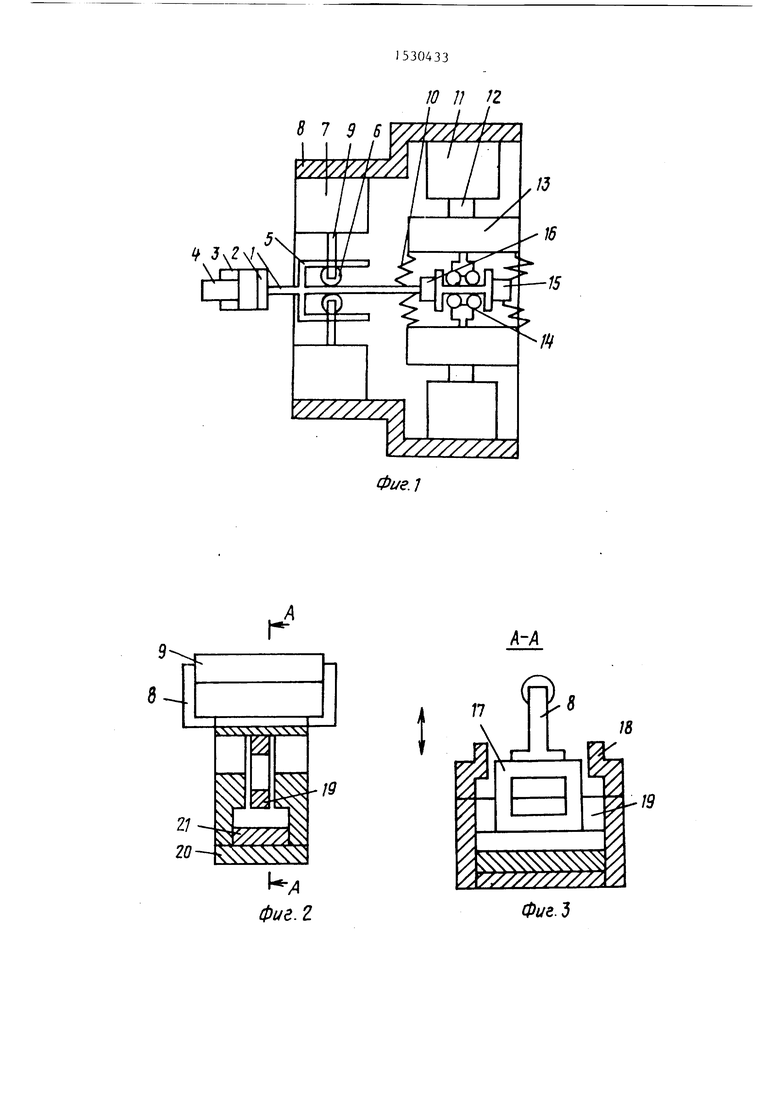
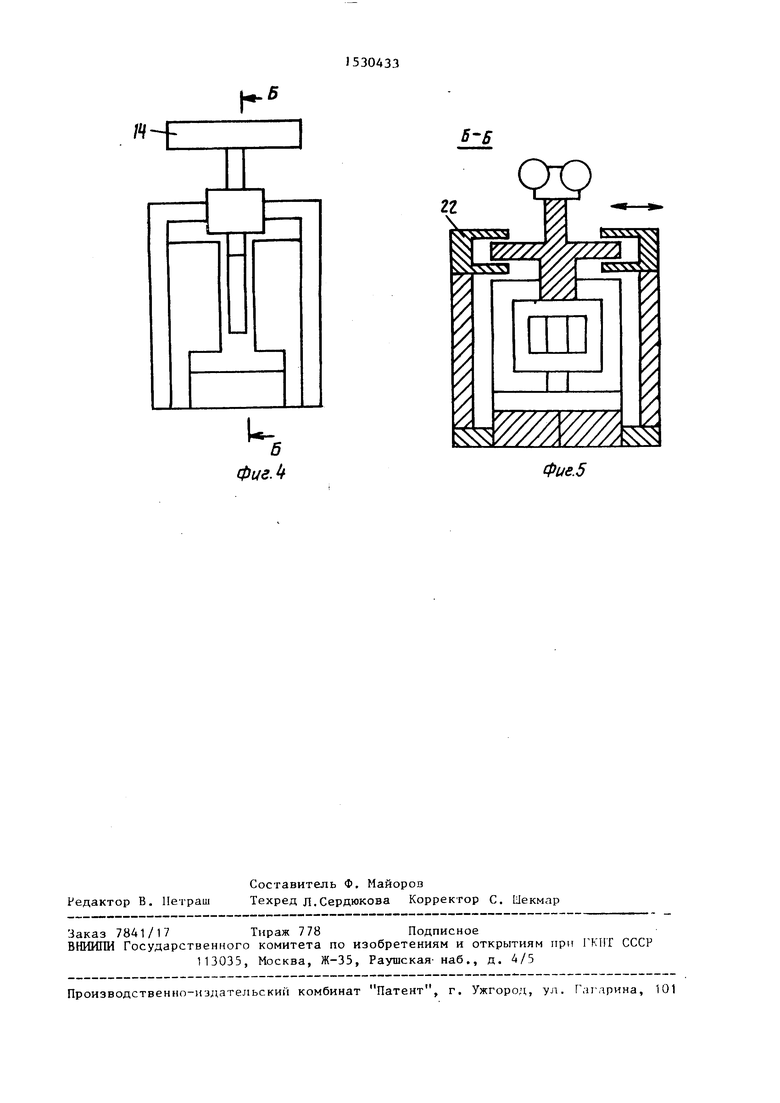
На фиг.1 показан манипулятор, об- ищй вид. разрез-, на фиг. 2 - электродвигатель поперечного перемещения руки на фиг. 3 - сечение А-А на фиг. на фиг.4 - электродвигатель продоль- ного перемещения; на фиг.5 - сечение Б-Ь на фиг.4; на фиг.6 - кинематическая схема манипулятора.
Манипулятор содержит руку 1 со схватом 2, в губках 3 которого пере- носится деталь 4. На руке закреплены стержни 5, которые вместе с планками 6 образ тот систему направляющих элементов, связывающих руку 1 с линейными электродвигателями 7 поперечног перемещения руки 1, которые закреплены на корпусе 8 и сдвинуты друг относительно друга на уг ол 90° . Планки Ь закреплены на выходных элементах (штоках) 9 эл м;тродвигателей 7. Рука подвешена на пружи: -ч 10. Кроме того на корпусе закреплены электродвигатели 11, по ко}1струк1,ии аналогичные электродвигателям 7, на штоках 12 ко -торых закрегшены электродвигатели 13 41ыдвиже1шя руки 1. Ытоки электродвигателей 13 также соединены с планками 14, взаимодействующими с высту- пами 15 на руке 1. В середине рука
Iснабжена шаровьт шарниром 16.
Обмотка 17 электродвигателей 7 и
IIрасполагается в направляющих 18
и зазоре, образованном полюсными на- конечннк,:гми 19. Между наконечниками на основании 20 укреплен источник 21 магнитного поля - электромагнит или постоянный г- агнит. Устройство электродвигателей 13 аналогично, только дв1 жение катушки с обмоткой происходит перпендикулярно оси щто- ка, ч го достигается установкой направляющих 22. Обмотки всех электродвигателей связаны с силовым блоком, KOToi biii потл чаог команды на включе-
Q
5
0
5 Q „
5
5
0
5
ние соответствующего электродвигате- ля от системы управления.
Манипулятор работает в сферической системе координат. Поворот руки вокруг шарнира 16 осуществляется электродвигателями 7, которые расположены попарно в двух взаимно перпендикулярных плоскостях. Когда по обмотке 17 протекает ток той или иной полярности, то он взаимодействует с полем источника 21. В результате появляется усилие, которое приложено к щтоку 9 и, соответственно, к планкам 6. Планки находятся в пазах, образованных стержнямл 5 и рукой 1, поэтому движение планок приводит к повороту руки со схватом в шарнире 16. Выдвижение руки осуществляется электродвигателями 13. Их штоки, перемещаясь в направляю1Щ1х 22, перемещают планки 14. Планки входят в зацепление с выступами 15 и производят вдвижение или выдвижение руки. Кроме того, сами электродвигатели 13 могут перемещаться с помощью электродвигателей 11 .
Формула изобретения
Манипулятор, содержащий руку со схватом, связанную через систему направляющих элементов с установленными на корпусе и сдвинутыми на угол 90 друг относительно друга линейными электродвигателями поперечного перемещения руки, и линейный электродвигатель продольного перемещения этой руки, отличающийся, тем, что, с целью упрощения конструкции, система направляющих элементов выполнена в виде четырех стержней, закрепленных на руке параллельно ее оси и сдвинутых друг относительно друга на угол 90°, и четырех планок, каждая из которых жестко связана с выходным элементом соответствующего электродвигателя поперечного перемещения и установлена между стержнем, расположенным со стороны этого электродвигателя, и рукой.
S 1 9 6
г
Ю 11 /2
УУ////777/.
Фие.Ч
К-/(
t
17
8
/в
х
g
Ю
/V
1 ////7///Л
Фи. д
w
-
s
Фиг.
S-Б
Фие.5
| Манипулятор | 1986 |
|
SU1465297A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
