Изобретение относится к машиностроению и может быть использовано при разработке промышленных роботов.
Целью изобретения является уарош,ение конструкции, уменьшение массы и габаритных размеров.
На чертеже изображен исполнительный орган манипулятора, обилий вид.
Исполнительный орган манипулятора содержит корпус 1, в котором установлено подвижное выходное звено 2, кинематически соединенное с приводом 3. Внутри выходного звена 2 установлен упругий элемент 4, закрепленный на выходном звене с помошью крепежного элемента 5. Второй упругий элемент 6 закреплен на корпусе 1. Оба упругих элемента связаны гибким элементом 7, который перекинут через блок 8. Причем длина гибкого элемента 7 превышает сумму максимального удлинения упругих элементов.
Исполнительный орган работает следуюш,им образом.
При перемеш,ении подвижного звена 2 вниз под действием привода 3 начинает растягиваться упругий элемент 4. Усилие этого
упругого элемента через гибкий элемент 7 передается на упругий элемент б, который тоже начинает растягиваться. При полиостью выдвинутом подвижном выходном звене 2 упругий элемент 6 растягивается на свой полный ход до блока 8.
Формула изобретения
Исполнительный орган манипулятора, содержаш,ий подвижное выходное звено, трособлочную систему, блок которой установлен на корпусе, привод и основной упругий элемент, связанный соответствуюш,ими концами с гибким элементом трособлочной системы и с выходным звеном, отличающийся, тем, что, с целью упрошения конструкции, уменьшения массы и габаритных размеров, он снабжен дополнительным упругим элементом, связанным соответствуюшими концами с гибким элементом трособлочной системы и корпусом, причем упругие элементы расположены по обе стороны блока, а длина гибкого элемента превышает сумму максимального удлинения упругих элементов.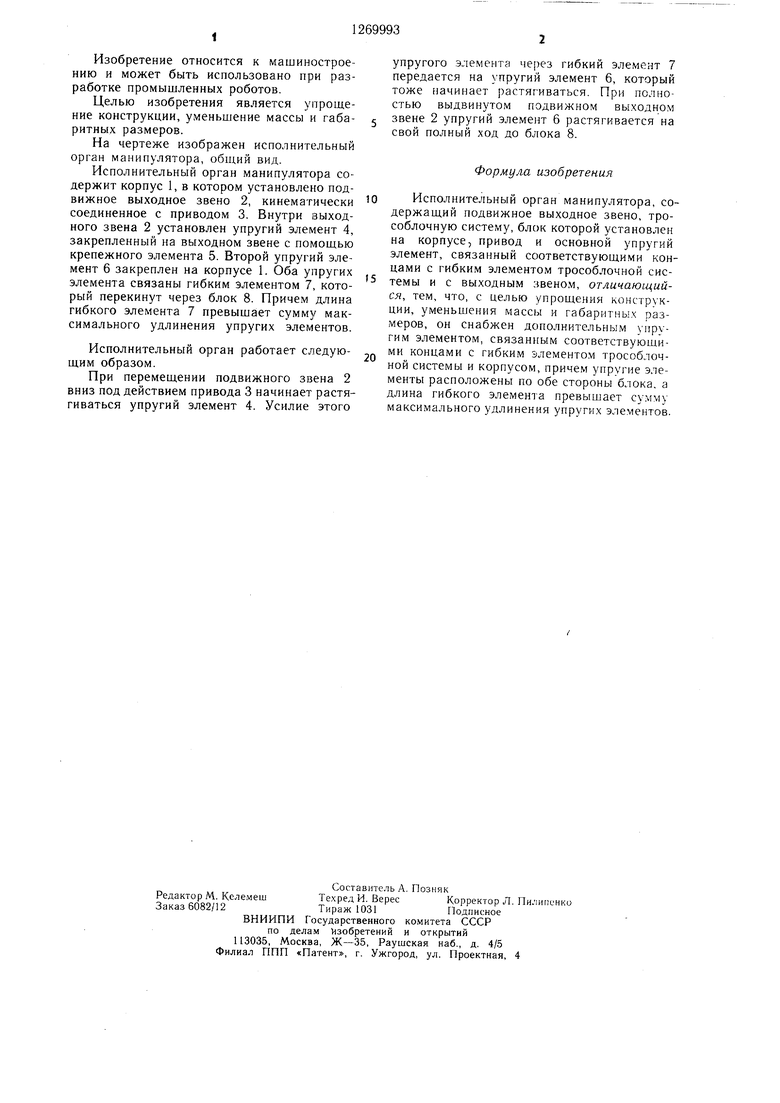
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Модуль манипулятора | 1989 |
|
SU1710336A1 |
| Моделирующее устройство | 1980 |
|
SU905059A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Уравновешенный манипулятор | 1986 |
|
SU1400874A1 |
| ГИДРОМАНИПУЛЯТОР МОБИЛЬНОГО РОБОТА | 2022 |
|
RU2773065C1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| Рабочий орган машины для изготовления и ремонта футеровки металлургических агрегатов | 1979 |
|
SU1061929A1 |
| Схват манипулятора | 1984 |
|
SU1214410A1 |
Изобретение может быть использовано при разработке промышленных роботов. Цель изобретения состоит в упрощении конструкции, уменьшении массы и габаритных размеров. При перемещении подвижного звена 2 вниз под действием привода 3 растягивается упругий элемент 4, воздействующий на гибкий элемент 7, который в свою очередь действует на упругий элемент 6. При полностью выдвинутом подвижном выходном звене 2 упругий элемент 6 растягивается на свой полный ход до блока 8. I ил. (Л с о: ее ее ее СА:
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
