Изобретение относится к области робототехники и предназначено для использования в конструкциях манипуляторов с большой грузоподъемностью
Целью изобретения является расширение технологических возможностей за счет обеспечения кинематической развязки движений звеньев.
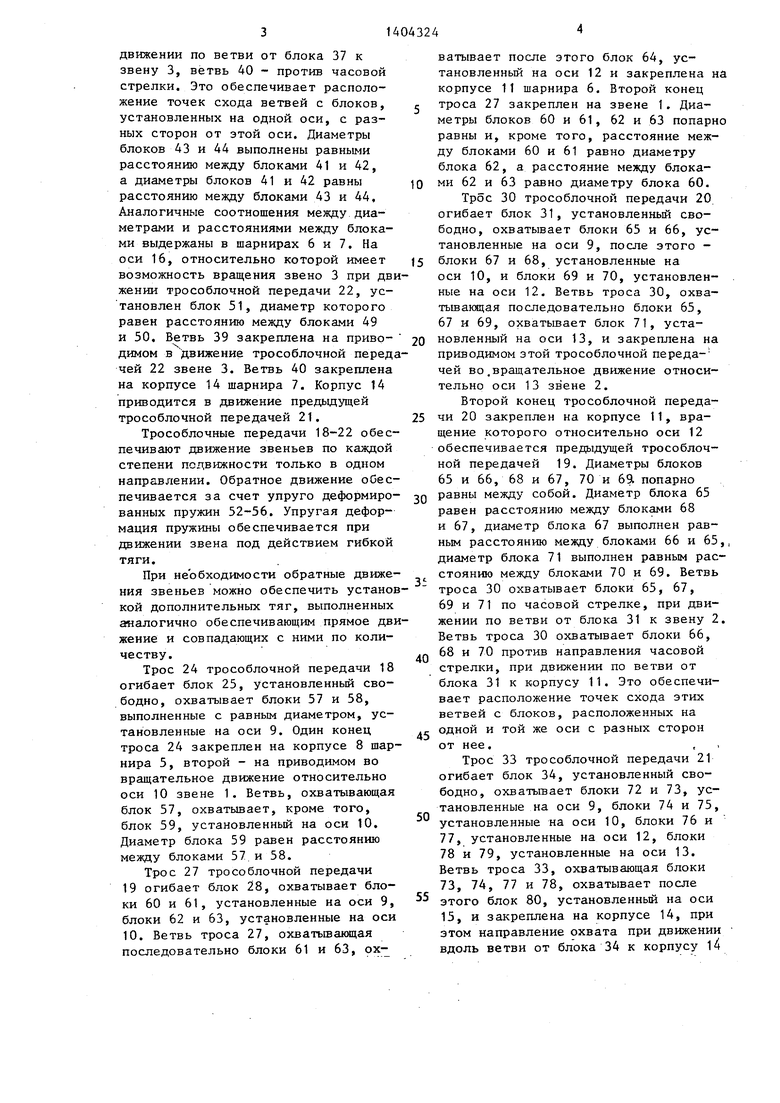
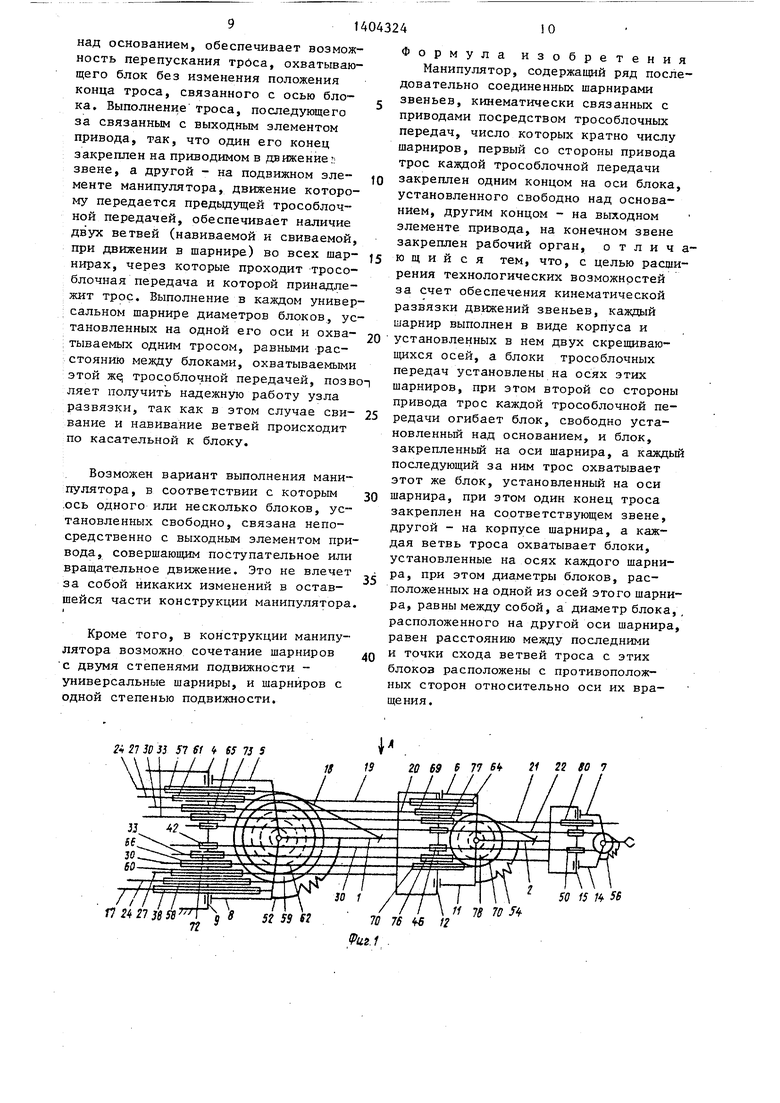
На фиг. 1 изображена кинематическая схема манипулятора; на фиг. 2 - Вид А на фиг. 1; па фиг. 3 - схема проводки трособлочной передачи. : Манипулятор содержит подвижные Звенья 1-3 (фиг. 1) и неподвижную фтойку, основание 4. Звенья соединены между собой и основанием универсальными шарнирами 5-7, Каждьш йарнир, например, состоит из корпу- (Ьа 8 и скрещивающихся осей вращения 9 и 10 (фиг. 2). Аналогично шарнир 6 состоит из корпуса 11, скрещивающихся осей 12 и 13, шарнир 7 - из корпуса 14, скрещивающихся осей 15 и 16, т.е. оси вращения Каждого шарнира выполнены скрещивающимися. В движение звенья приводятся приводом, установленным на основании (не показан), через гибкие тяги, например тросы. Движение по каждой степени подвижности шарнира обеспечивается индивидуальным тросом. Движение звену 1 передается через трособлочные передачи 17 и 18, звену 2 - через трособлочные передачи 19 и 20, звену 3 - через трособлочные передачи 21 и 22 (фиг. 2). Каждая трособлочная передача, кроме 17, состоит из двух соединенных между собой через блок тросов. Тро- соблочная передача 18 состоит из тросов 23 и 24, блока 25, Трособлочная передача 19 - из тросов 26 и 27, блока 28. Трособлочная передача 20 - Яз тросов 29 и 30, блока 31. Трособлочная передача 21 - из тросов 32 и 33, блока 34, Трособлочная передача 22 - из тросов 35 и 36, блока 37. Блоки 25, 28, 31, 34 и 37 ус- т ановлены свободно над основанием и не имек)т точек контакта со звеньями и шарнирами. Один конец каждого первого троса 23, 26, 29, 32 и 33 соответствующей трособлочной передачи соединен с выходным элементом привода, установленного .на неподвижном основании, а другой конец каждого из этихдросов - на оси соответствующего блока 25, 28, 31, 34
0
5
0
5
0
5
0
5
0
5
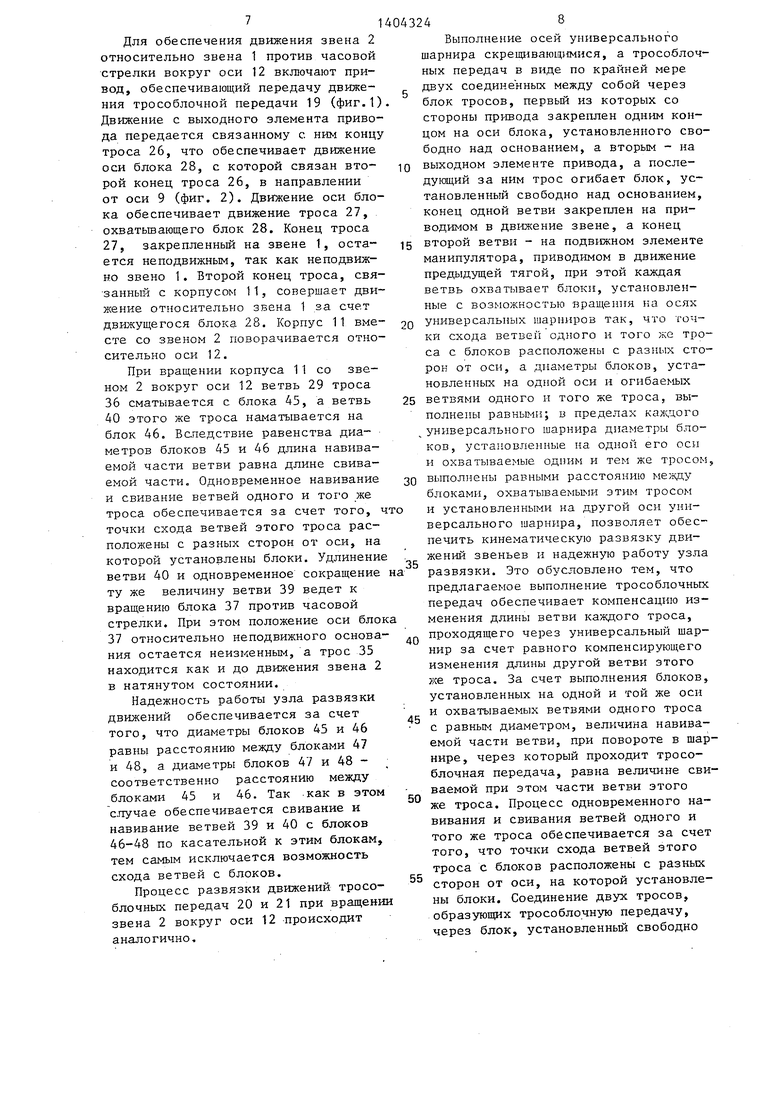
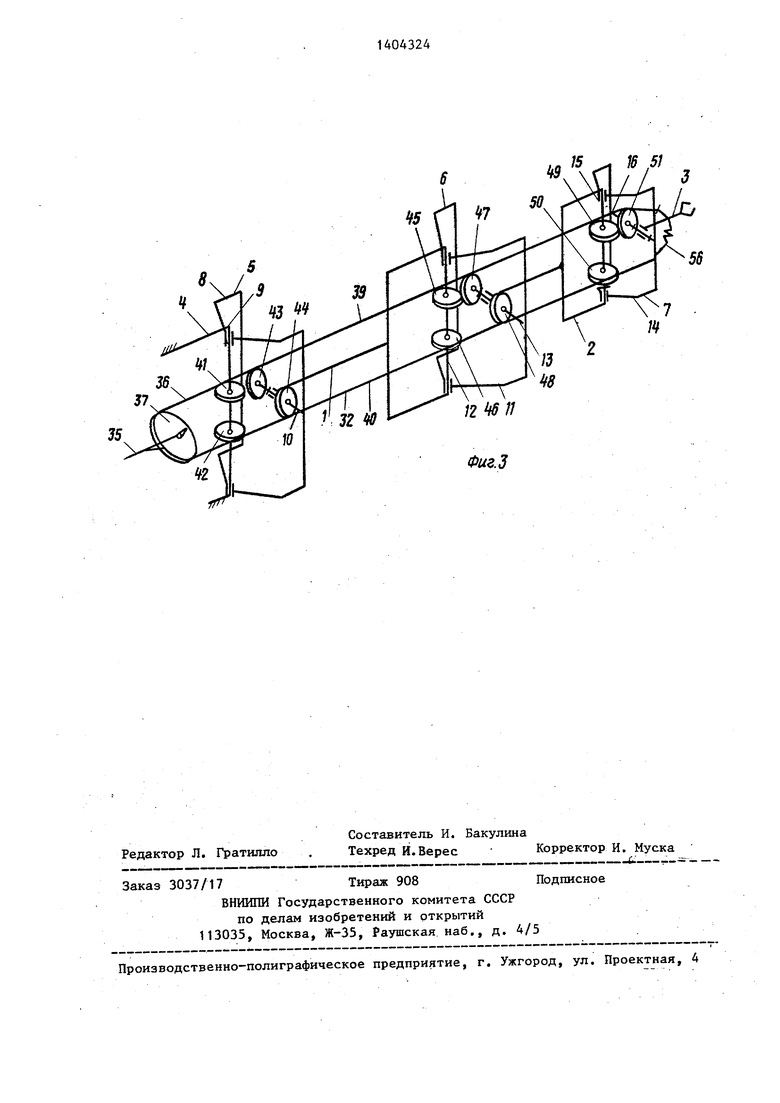
или 37, установленного свободно. Второй трос 24, последующий за тросом 23 в трособлочной передаче.- i 18, огибает блок 25, установленньш свободно. Каждая из ветвей троса 24, сходящих с блока 25, охватьшает индивидуальный блок, установленный на оси 9 шарнира, при этом направление охвата ветвями индивидуальных блоков обеспечивает расположение точек схода с блоков с разных сторон от оси 9. Трособлочная передача 17 выполнена в виде одного троса, охватывающего блок 38. Концы троса закреплены на корпусе 8 шарнира 5, а середина троса - на выходном элементе привода. Индивидуальное построение трособлочной передачи 17, отличное от всех остальных тяг, объясняется тем, что эта Трособлочная передача обеспечивает движение первого из подвижных от основания корпусов и не проходит через шарниры. Построе-. ние всех остальных трособлочных передач аналогично выполнению трособлочной передачи 18. Число охватываемых ветвями блоков зависит от числа осей шарниров, над которыми проходит передача. Вследств|1е идентичности выполнения трособлочных передач рассмотрим их выполнение на примере трособлочной передачи 22, обеспечивающей движение вокруг горизонтальной оси 16 шарнира 7 (фиг. 3). Трос 35 трособлочной передачи 22 закреплен одним концом на выходном элементе привода, а другим - на оси блока 37, установленного свободно. Трос 36 огибает блок 37, каждая из его ветвей 39 и 40, сходящих с блока 37, охватывает индивидуальные блоки, установленные- на осях 9, 10, 12, 13, 15 и 16 шар- . ниров с возможностью свободного tepa- щения. На оси 9 установлены блоки 41 и 42, на оси 10 - блоки 43 и 44, на оси 12 - блоки 45 и 46, на оси 13 - блоки 47 и 48, на оси 15 - блоки 49 и 50, на оси 16 - блок 51. Ветвь 39 троса 36 охватьшает последовательно блоки 41, 43, 45, 47, 49 и 51, ветвь 40 - блоки 42, 44, 46, 48. и 50. Диаметры блоков, установленных на одной и той же оси и охватывае- мьцс одним и тем же тросом, выполнены равными между собой. Ветви 39 и 40 охватывают блоки, установленные на осях, во встречных направлениях, ветвь 39 - по часовой стрелке при
движении по ветви от блока 37 к звену 3, ветвь 40 - против часовой стрелки. Это обеспечивает расположение точек схода ветвей с блоков, установленных на одной оси, с разных сторон от этой оси. Диаметры блоков 43 и 44 выполнены равными расстоянию между блоками 41 и 42, а диаметры блоков 41 и 42 равны расстоянию между блоками 43 и 44. Аналогичные соотношения между диаметрами и расстояниями между блоками выдержаны в шарнирах 6 и 7. На оси 16, относительно которой имеет возможность вращения звено 3 при двжении трособлочной передачи 22, установлен блок 51, диаметр которого равен расстоянию между блоками 49 и 50. Ветвь 39 закреплена на приво- димом в движение трособлочной передчей 22 звене 3. Ветвь 40 закреплена на корпусе 14 шарнира 7. Корпус 14 приводится в движение предыдущей трособлочной передачей 21.
Трособлочные передачи 18-22 обеспечивают движение звеньев по каждой степени подвижности только в одном направлении. Обратное движение обеспечивается за счет упруго деформированных пружин 52-56. Упругая деформация пружины обеспечивается при движении звена под действием гибкой тяги.
При необходимости обратные движения звеньев можно обеспечить установкой дополнительных тяг, выполненных аналогично обеспечивающим прямое движение и совпадающих с ними по количеству.
Трос 24 трособлочной передачи 18 огибает блок 25, установленный свободно, охватывает блоки 57 и 58, выполненные с равным диаметром, установленные на оси 9. Один конец троса 24 закреплен на корпусе 8 шарнира 5, второй - на приводимом во вращательное движение относительно оси 10 звене 1. Ветвь, охватывающая блок 57, охватывает, кроме того, блок 59, установленный на оси 10. Диаметр блока 59 равен расстоянию между блоками 57 и 58.
Трос 27 трособлочной передачи 19 огибает блок 28, охватывает блоки 60 и 61, установленные на оси 9, блоки 62 и 63, установленные на оси 10. Ветвь троса 27, охватьшающая последовательно блоки 61 и 63, охватывает после этого блок 64, установленный на оси 12 и закреплена на корпусе 11 шарнира 6. Второй конец
троса 27 закреплен на звене 1. Диаметры блоков 60 и 61, 62 и 63 попарно равны и, кроме того, расстояние между блоками 60 и 61 равно диаметру блока 62, а расстояние между блоками 62 и 63 равно диаметру блока 60. Трос 30 трособлочной передачи 20. огибает блок 31, установленный свободно, охватывает блоки 65 и 66, установленные на оси 9, после этого блоки 67 и 68, установленные на
оси 10, и блоки 69 и 70, установленные на оси 12. Ветвь троса 30, охва- тьшакяцая последовательно блоки 65,
67и 69, охватьшает блок 71, уста- новленный на оси 13, и закреплена на
приводимом этой трособлочной переда- чей во.вращательное движение относительно оси 13 зв ене 2.
Второй конец трособлочной передачи 20 закреплен на корпусе 11, вращение которого относительно оси 12 обеспечивается предыдущей трособлочной передачей 19. Диаметры блоков 65 и 66, 68 и 67, 70 и 691 попарно
равны между собой. Диаметр блока 65 равен расстоянию между блоками 68 и 67, диаметр блока 67 выполнен равным расстоянию между блоками 66 и 65,, диаметр блока 71 выполнен равным расстоянию между блоками 70 и 69. Ветвь троса 30 охватывает блоки 65, 67, 69 и 71 по часовой стрелке, при движении по ветви от блока 31 к звену 2. Ветвь троса 30 охватывает блоки 66,
68и 70 против направления часовой
стрелки, при движении по ветви от блока 31 к корпусу 11. Это обеспечивает расположение точек схода этих ветвей с блоков, расположенных на одной и той же оси с разных сторон
от нее.,
Трос 33 трособлочной передачи 21 огибает блок 34, установленный свободно, охватьтает блоки 72 и 73, установленные на оси 9, блоки 74 и 75, установленные на оси 10, блоки 76 и 77, установленные на оси 12, блоки 78 и 79, установленные на оси 13. Ветвь троса 33, охватывающая блоки 73, 74, 77 и 78, охватывает после этого блок 80, установленный на оси 15, и закреплена на корпусе 14, при этом направление охвата при движении вдоль ветви от блока 34 к корпусу l4
выполнено по часовой стрелке. Ветвь троса 33, охватъшающая блоки 72, 75, 76 и 79 закреплена на звене 2, приводимом в Движение предыдущей тросо- блочной передачей 20, а направление о хвата блоков при движении вдоль вет- аи от блока 34 к звену 2 выполнено против часовой стрелки. Диаметры блоков 73 и 72, 75 и 74, 77 и 76, t9 и 78, попарно равны между собой. Диаметр блока 72 выполнен равным рас- фтоянию между блоками 75 и 74, диаметр блока 74 выполнен равным рас- Стоянию между блоками 73 и 72, диа- йетр блока 75 выполнен равным рас- 4;тоянию между блоками 79 и 78, диа- Цетр блока 78 выполнен равным рассто- йнию между блоками 76 и 77, диаметр блока 80 выполнен равным расстоянию Цежду блоками 79 и 78. Все блоки, установленные на осях, ф1еют возмож11ость свободно относи- . йельно них Яращаться. I В исходном положении все тросо- фоуные передачи находятся в подтя- н|утом состоянии, что обеспечивает вы- б;Ьр всех зазоров и исключает прови- тросов,
Манипулятор работает следующ11М об- .
При необходимости совершить поворот одного звена относительно другого, например звена 2 относительно
ние, равное половине диаметра бло 71, то это обеспечивает создание движущегося момента относительно 13, обеспечивающего вращение звен относительно этой оси.
При вращении звена 2 относител но звена 1 вокруг оси 13 ветвь 40 троса 36, обеспечивающего передач
0 движения звену 3, и заключенная м ду блоками 48 и 50, навивается на блок 48, а аналогичная часть ветв свивается с блока 47 {фиг. 3). Вс ствие равенства диаметров блоков
15 и 48 длина свиваемой части ветви равна длине навиваемой части ветв 40. Так как ветви 39 и 40 принадл жат одной и той лее трособло чной п редаче, то изменение длин ее част
2Q взаимно компенсируется. При этом ки 47,- 48, 45, 46, 44, 43, 41, 42 и 37 вращаются против часовой стр ки. Блоки 49 и 50, а также ось бл ка 37 остаются неподвижными, что
25 обеспечивает отсутствие вращения на 3 относительно звена 2 вокруг 15. Одновременное навивание и сви ние ветвей одного и того же троса обеспечивается за счет того, что
30 точки схода этих ветвей с блоков рас ложены с разных сторон от оси,на кот рой установлены блоки.
Компенсация изменения длин вет троса 33, также проходящей над ша
збена 1 вокруг оси 13, включают привод д ниром 6, в котором обеспечивается
соответствующей степени подвижности. Пфд действием работающего привода т|)ос 29 трособлочной передачи 20, один конец которой закреплен на выходном элементе привода, движется в направлении от оси 9 (фиг. 1). Движение троса 29 обеспечивает движение в том же направлении блока 31, так как ось блока связана с концом троса 29. Движение блока 31 в направлении от оси 9 сопровождается вращением блока 31 относительно своей оси против направления часовой стрелки, так как ветвь троса 30, охватьгоающая блоки 65, 67 и 69, закреплена на корпусе 11, неподвижном в данный мо- мбнт. За счет вращения блока 31 происходит перепускание троса 30 относительно этого блока, при этом ветвь, ахватьшающая блоки 65, 67 и 69 и 71, движется вдоль звена 1 в направлении к оси 9, так как конец этой ветви . закреплен на звене 2 и, кроме того, ветвь удалена от оси 13 на расстоя40
движение в данный момент, происход аналогично компенсации длин ветвей троса 36.
Таким образом, при вращении зв на 2 относительно звена 1 вокруг
13 положение звена 3 относительно звена 2 не меняется, т.е. обеспечи вается развязка движений звеньев, что обеспечивает возможность испол 45 зования руки манипулятора на техно гических операциях, требующих повы шенной точности движений.
Развязка движений привода звень при вращении звена 2 относительно звена 1, относительно оси 12 приве дена на примере трособлочной передачи 22.
Вследствие идентичности выполне ния трособлочных передач 20 и 21, проходящих через шарнир 6, в котор совершается движение, процесс комп сации изменения длин ветвей тросов обеспечивающий развязку движений, аналогичен.
50
55
ние, равное половине диаметра блока 71, то это обеспечивает создание движущегося момента относительно оси 13, обеспечивающего вращение звена 2 относительно этой оси.
При вращении звена 2 относительно звена 1 вокруг оси 13 ветвь 40 троса 36, обеспечивающего передачу
движения звену 3, и заключенная между блоками 48 и 50, навивается на блок 48, а аналогичная часть ветви 39 свивается с блока 47 {фиг. 3). Вследствие равенства диаметров блоков 47
и 48 длина свиваемой части ветви 39 равна длине навиваемой части ветви 40. Так как ветви 39 и 40 принадлежат одной и той лее трособло чной передаче, то изменение длин ее частей
взаимно компенсируется. При этом блоки 47,- 48, 45, 46, 44, 43, 41, 42 и 37 вращаются против часовой стрелки. Блоки 49 и 50, а также ось блока 37 остаются неподвижными, что
обеспечивает отсутствие вращения звена 3 относительно звена 2 вокруг оси 15. Одновременное навивание и свивание ветвей одного и того же троса обеспечивается за счет того, что
точки схода этих ветвей с блоков расположены с разных сторон от оси,на которой установлены блоки.
Компенсация изменения длин ветвей троса 33, также проходящей над шарниром 6, в котором обеспечивается
движение в данный момент, происходит аналогично компенсации длин ветвей троса 36.
Таким образом, при вращении звена 2 относительно звена 1 вокруг оси
13 положение звена 3 относительно звена 2 не меняется, т.е. обеспечи-, вается развязка движений звеньев, что обеспечивает возможность исполь- зования руки манипулятора на технологических операциях, требующих повышенной точности движений.
Развязка движений привода звеньев при вращении звена 2 относительно звена 1, относительно оси 12 привеена на примере трособлочной переачи 22.
Вследствие идентичности выполнения трособлочных передач 20 и 21, 22, проходящих через шарнир 6, в котором совершается движение, процесс компенсации изменения длин ветвей тросов, обеспечивающий развязку движений, аналогичен.
Для обеспечения движения звена 2 относительно звена 1 против часовой стрелки вокруг оси 12 вклзочают привод, обеспечивающий передачу движения трособлочной передачи 19 (фиг.1) Движение с выходного элемента привода передается связанному с ним концу троса 26, что обеспечивает движение оси блока 28, с которой связан второй конец троса 26, в направлении от оси 9 (фиг. 2), Движение оси блока обеспечивает движение троса 27, охватьшающего блок 28, Конец троса 27, закрепленный на звене 1, остается неподвижным, так как неподвижно звено 1. Второй конец троса, свя- занный с корпусом 11, совершает движение относительно звена 1 за счет движущегося блока 28. Корпус 11 вместе со звеном 2 поворачивается относительно оси 12.
При вращении корпуса 11 со звеном 2 вокруг оси 12 ветвь 29 троса
36сматывается с блока 45, а ветвь 40 этого же троса наматывается на блок 46. Вспедствие равенства диаметров блоков 45 и 46 длина навиваемой части ветви равна длине свиваемой части. Одновременное навивание и свивание ветвей одного и тог о же троса обеспечивается за счет того, ч точки схода ветвей этого троса расположены с разных сторон от оси, на которой установлены блоки. Удлинение ветви 40 и одновременное сокращение ту же величину ветви 39 ведет к вращению блока 37 против часовой стрелки. При этом положение оси блок
37относительно неподвижного основания остается неизменным, а трос 35 находится как и до движения звена 2 в натянутом состоянии.
Надежность работы узла развязки движений обеспечивается за счет того, что диаметры блоков 45 и 46 равны расстоянию между блоками 47 и 48, а диаметры блоков 47 и 48 - соответственно расстоянию между блоками 45 и 46. Так -как в этом с.пучае обеспечивается свивание и навивание ветвей 39 и 40 с блоков 46-48 по касательной к этим блокам, тем самым исключается возможность схода ветвей с блоков.
Процесс развязки движений тросо- блочных передач 20 и 21 при вращении звена 2 вокруг оси 12 происходит аналогично.
5
0
5
0
5
0
5
0
5
Выполнение осей универсального шарнира скрещивающимися, а трособлоч- ных передач в виде по крайней мере двух соединенных между собой через блок тросов, первьш из которых со стороны привода закреплен одним концом на оси блока, установленного свободно над основанием, а вторым - на выходном элементе привода, а после- дукщий за ним трос огибает блок, установленный свободно над основанием, конец одной ветви закреплен на приводимом в движение звене, а конец второй ветви - на подвижном элементе манипулятора, приводимом в движение предыдущей тягой, при этой каждая ветвь охватывает блоки, установленные с возможностью вращения на осях универсальных шарниров так, что точки схода ветвей одного и того же троса с блоков расположены с разных сторон от оси, а диаметры блоков, установленных на одной оси и огибаемых ветвями одного и того же троса, выполнены равными; в пределах кал(,цого универсального шарнира диаметры блоков, установленные на одной его оси и охватываемые одним и тем же тросоьц выполнены равными расстоянию между блоками, охватываемы 1и этим тросом и установленными на другой оси универсального шарнира, позволяет обеспечить кинематическую развязку движений звеньев и надежную работу узла развязки. Это обусловлено тем, что предлагаемое выполнение трособлочных передач обеспечивает компенсацию изменения длины ветви каждого троса, проходящего через универсальный шарнир за счет равного компенсирующего изменения длины другой ветви этого же троса. За счет выполнения блоков, установленных на одной и той же оси и охватываемых ветвями одного троса с равным диаметром, величина навиваемой части ветви, при повороте в шарнире, через который проходит тросо- блочная передача, равна величине свиваемой при этом части ветви этого же троса. Процесс одновременного навивания и свивания ветвей одного и того же троса обеспечивается за счет того, что точки схода ветвей этого троса с блоков расположены с разных сторон от оси, на которой установлены блоки. Соединение двух тросов, образующих трособлочную передачу, через блок, установленный свободно
над основанием, обеспечивает возможность перепускания трйса, охватывающего блок без изменения положения конца троса, связанного с осью блока. Выполнение троса, последующего за связанным с выходным элементом привода, так, что один его конец закреплен на приводимом в движение:; звене, а другой - на подвижном элементе манипулятора, движение которому передается предьщущей трособлоч- ной передачей, обеспечивает наличие двух ветвей (навиваемой и свиваемой, при движении в шарнире) во всех шар- нирах, через которые проходит тросо- блочная передача и которой принадлежит трос. Выполнение в каждом универсальном шарнире диаметров блоков, установленных на одной его оси и охва- ;тываемых одним тросом, равными -расстоянию между блоками, охватываемыми этой ж трособлочной передачей, позво ляет получить надежную работу узла развязки, так как в этом случае сви- вание и навивание ветвей происходит по касательной к блоку.
Возможен вариант выполнения манипулятора, в соответствии с которым .ось одного или несколько блоков, установленных свободно, связана непосредственно с выходным элементом привода, совершающим поступательное или вращательное движение. Это не влечет за собой Никаких изменений в оставшейся части конструкции манипулятора.
Кроме того, в конструкции манипулятора возможно сочетание шарниров с двумя степенями подвижности - универсальные шарниры, и шарниров с одной степенью подвижности.
0
5 0 5
о
5
0
Формула изобретения
Манипулятор, содержащий ряд последовательно соединенных шарнирами звеньев, кинематически связанных с приводами посредством трособлочных передач, число которых кратно числу шарниров, первый со стороны привода трос калщой трособлочной передачи закреплен одним концом на оси блока, установленного свободно над основанием, другим концом - на выходном элементе привода, на конечном звене закреплен рабочий орган, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения кинематической развязки движений звеньев, каждый шарнир выполнен в виде корпуса и установленных в нем двух скрещивающихся осей, а блоки трособлочных передач установлены на осях этих шарниров, при этом второй со стороны привода трос каждой трособлочной передачи огибает блок, свободно уста- новленньй над основанием, и блок, закрепленный на оси шарнира, а каждый последующий за ним трос охватывает этот же блок, установленный на оси шарнира, при этом один конец троса закреплен на соответствующем звене, другой - на корпусе шарнира, а каждая ветвь троса охватывает блоки, установленные на осях каждого шарнира, при этом диаметры блоков, расположенных на одной из осей этого шарнира, равны между собой, а диаметр блока, , расположенного на другой оси шарнира, равен расстоянию между последними и точки схода ветвей троса с этих блоков расположены с противоположных сторон относительно оси их вращения.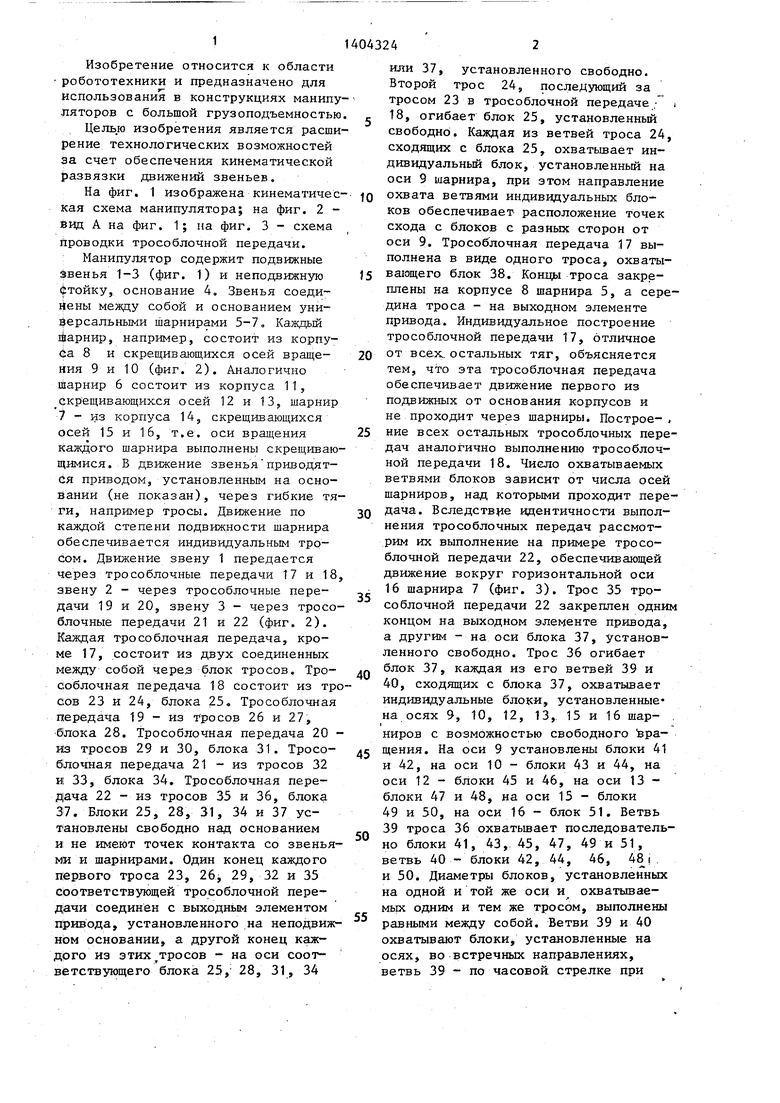
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Уравновешенный манипулятор | 1986 |
|
SU1400874A1 |
| Манипулятор | 1985 |
|
SU1283085A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
Изобретение относится к робототехнике и предназначено для использования в конструкциях манипуляторов с большой грузоподъемностью. Целью изобретения является расширение технологических возможностей за счет обеспечения кинематической развязки движений звеньев. Шарниры 5, 6 и 7 сост;авлены соответственно из корпусов 8, 11 и 14 и скрещивающихся осей 29 31 JO П 23 вращения 9и10, 12и13, и15и16. Движение звеньям 1-3 передается через трособлочные ; передачи 17-22. Все трособлочные передачи выполнены идентично. Так трос 35 трособлочной передачи 22 закреплен одним концом на выходном элементе привода, а другим - на оси блока 37, установленного свободно. Трос 36 огибает блок 37, а каждая из его ветвей 39 и 40, сходя- с блока 37, охватывает индивидуальные блоки, установленные на осях шарниров с возможностью свободного вращения. Диаметры блоков, установленных на одной и той же оси охватываемых одним и тем же тросом, выполнены равными между собой. Ветви 39 и 40 охватьшают блоки, установленные на осях во встречных направлениях. Это обеспечивает расположение точек схода ветвей с блоков, установленных на одной оси, с разных сторон от этой оси. Диаметры блоков 43 и 44 выполнены равными расстоянию между блоками, расположенными на другой оси. 3 ил. 6uSf(. П 95 /« ft 5S (Л 4 00 4: Vut.2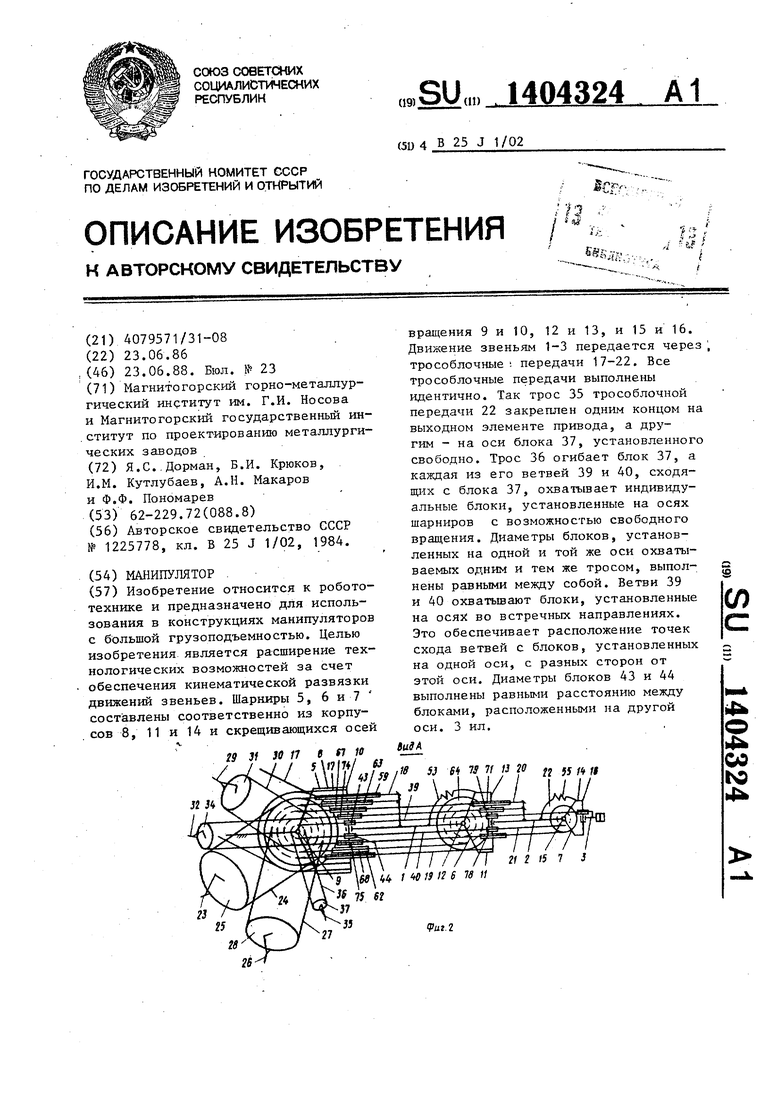
24 27 3D Л 57 S1 65 75 5 / I
Г} 242l36SS r 8 si 59 Si 72
2i 22 SO 7
I I
3D 1 / / I I
/ / / ff 78 71 f
70 76 f5 t2 IPUi.1
16 5/
W
Фие.З
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
